






 本文详细介绍了如何使用STM32CubeMx配置FreeRTOS环境,结合正点原子开发板,设置RCC时钟,配置USART中断,重定向printf到串口,以及在FreeRTOS中添加相关源码,实现通过串口打印调试信息。
本文详细介绍了如何使用STM32CubeMx配置FreeRTOS环境,结合正点原子开发板,设置RCC时钟,配置USART中断,重定向printf到串口,以及在FreeRTOS中添加相关源码,实现通过串口打印调试信息。
文章目录
STM32CubeMx使用FreeRTOS搭建printf输出串口打印-----基于正点原子开发板阿波罗
1.输入目标芯片
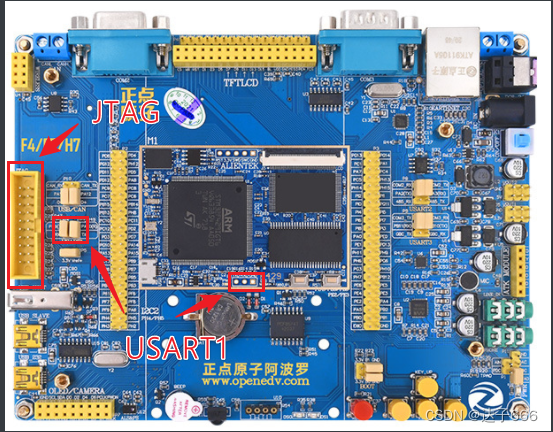
使用的开发板是正点原子的STM32F429IGT6开发板
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ABV5DpdV-1675233100755)(C:\Users\lan\AppData\Roaming\Typora\typora-user-images\image-20230201095021027.png)]](https://i-blog.csdnimg.cn/blog_migrate/e60216d2e1e70e874be85842392d77e2.png)
2.选择RCC时钟
在 STM32 中,一共有 5 个时钟源,分别是 HSI 、 HSE 、 LSI 、 LSE 、 PLL 。
①HSI 是高速内部时钟, RC 振荡器,频率为 8MHz ;
②HSE 是高速外部时钟,可接石英 / 陶瓷谐振器,或者接外部时钟源,频率范围是 4MHz – 16MHz ③LSI 是低速内部时钟, RC 振荡器,频率为 40KHz ;
④LSE 是低速外部时钟,接频率为 32.768KHz 的石英晶体;
⑤PLL 为锁相环倍频输出,严格的来说并不算一个独立的时钟源, PLL 的输入可以接 HSI/2 、 HSE 或者 HSE/2 。PLL倍频可选择为 2 – 16 倍,但是其输出频率最大不得超过 72MHz
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kvcMc5qX-1675233100757)(C:\Users\lan\AppData\Roaming\Typora\typora-user-images\image-20230201095211087.png)]](https://i-blog.csdnimg.cn/blog_migrate/23a0c865b4b4de2dfca9289a863cdad8.png)
1.Crystal/Ceramic Resonator(晶振/陶瓷谐振器)表示的是选择 HSE(外部高速时钟)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ImdwZujU-1675233100757)(C:\Users\lan\AppData\Roaming\Typora\typora-user-images\image-20230201102028162.png)]](https://i-blog.csdnimg.cn/blog_migrate/d234ffd789b6b5ca60563e82bdb37080.png)
2.BYPASS Clock Source(旁路时钟源)就是由外部给定一个时钟信号,是单向的,猜测一般用于作为同步时钟
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4rriIgTz-1675233100758)(C:\Users\lan\AppData\Roaming\Typora\typora-user-images\image-20230201102102050.png)]](https://i-blog.csdnimg.cn/blog_migrate/8c71531decab9ed16dd0c4c06539cf4b.png)
3.Disable(禁用)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-USpNPDg2-1675233100758)(C:\Users\lan\AppData\Roaming\Typora\typora-user-images\image-20230201102145562.png)]](https://i-blog.csdnimg.cn/blog_migrate/77404472b5b271b80507e26d06fd1886.png)
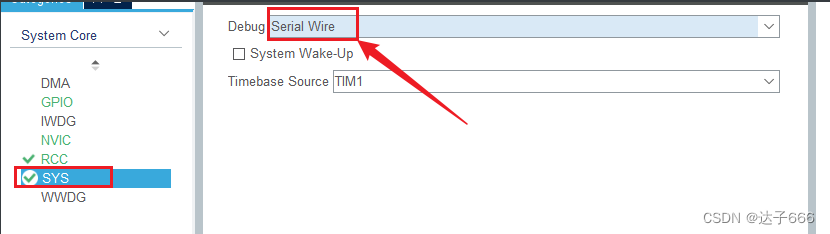
3.配置调试模式
比较重要的一部:非常重要的一步,否则会造成第一次烧录程序后续无法识别调试器
配置JTAG模式

配置Serial Wire
4.USART的配置
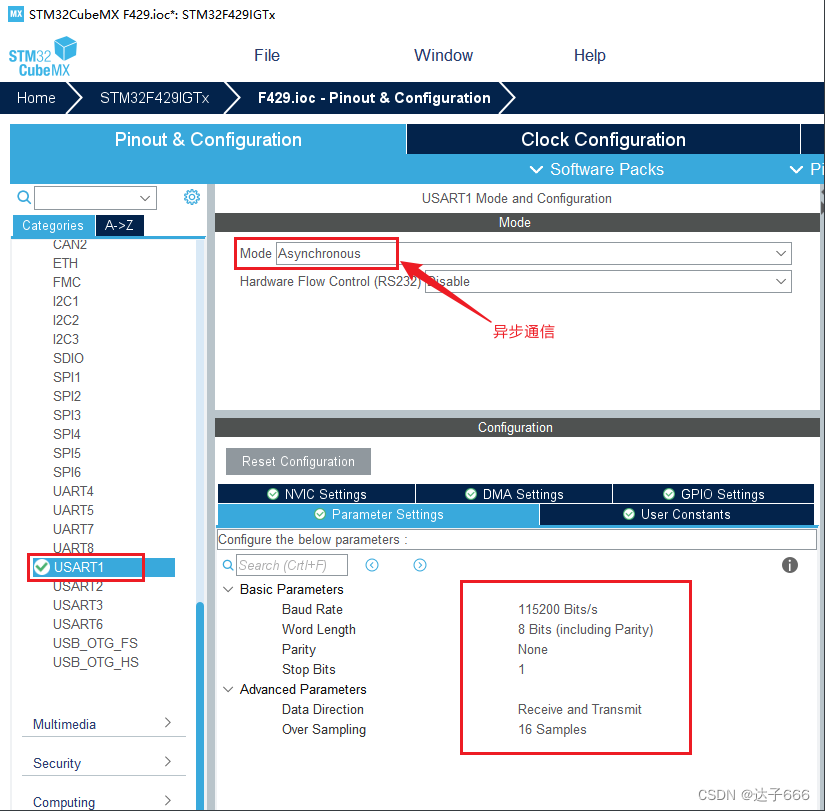
Asynchronous (异步的),
Synchronous(同步的),
Single Wire (Half-Duplex)(单线(半双工)),
Multiprocessor Communication(多处理器通信),这里为我们配置的模式。
IrDA(红外通讯),介绍链接http://www.stmcu.org.cn/module/forum/thread-610633-1-1.html
LIN(LIN总线协议),介绍链接https://www.cnblogs.com/yangjiguang/p/6093240.html
SmartCard(智能卡),介绍链接https://baike.baidu.com/item/smart%20card
学习链接https://blog.csdn.net/xqhrs232/article/details/80904616
SmartCard with Card Clock (带卡时钟的智能卡) 。
Hardware Flow Control (RS232) 选项中选择 Disable 或者 Enable (在这种模式中只有在Mode中选择Asynchronous方可选择)
参考:https://blog.csdn.net/qq_26575553/article/details/97249848
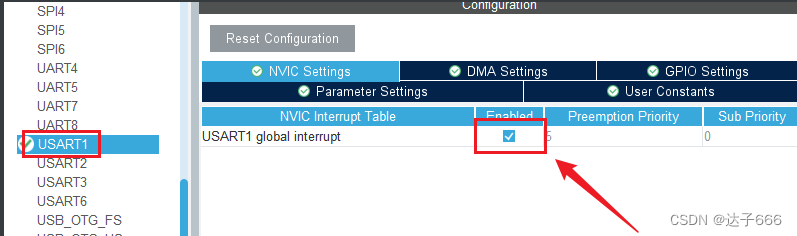
5.配置中断
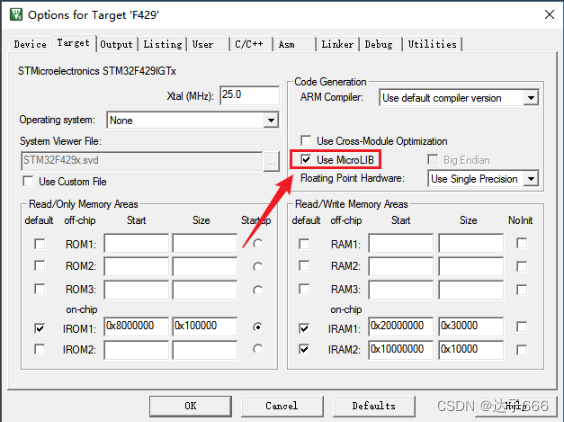
6.printf的重定向功能
因为 Microlib 进行了高度优化以使代码变得很小。它的功能比缺省 C 库少,并且根本不具备某些 ISO C 特性。 某些库函数的运行速度也比较慢,想要使用printf(),必须开启
7.代码添加
7.1 在main函数添加
/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes */
/* USER CODE BEGIN 4 */
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* @brief getchar,scanf USARTx
* @retval None
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
/* USER CODE END 4 */
7.2 提前告知编译器不使用半主机模式
void _sys_exit(int x)
{
x = x;
}
/* 标准库需要的支持类型 */
struct __FILE
{
int handle;
};
FILE __stdout;
7.3 GCC中使用标准库重定向
int _write(int fd, char *ptr, int len)
{
HAL_UART_Transmit(&huart1, (uint8_t*)Buffer, sizeof(Buffer), 0xFFFF);
return len;
}
8.修改中断函数
stm32f4xx_it.c 中断服务函数文件,找到 USART1 中断的服务函数 USART1_IRQHandler()
中断服务函数里面就调用了串口中断处理函数 HAL_UART_IRQHandler()
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
然后再stm32f4xx_hal_uart.c 中找到 定时器中断处理函数原型 HAL_TIM_IRQHandler(),他的主要作用是判断是哪个串口产生中断,清除中断标识位,然后再去调用中断回调函数 HAL_UART_RxCpltCallback()
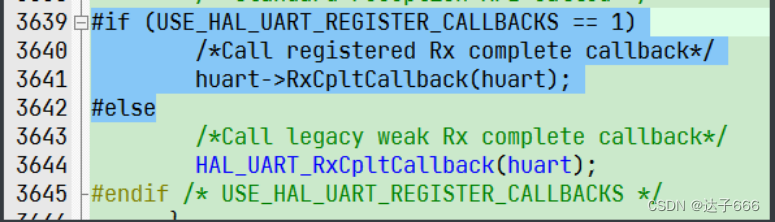
在 stm32f1xx_it.c 这个文件的最下面添加 HAL_UART_RxCpltCallback()的回调函数实现
/* USER CODE BEGIN 1 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
HAL_UART_Transmit(&huart1, (uint8_t *)Buffer, 1, 0xffff);
HAL_UART_Receive_IT(&huart1, (uint8_t *)Buffer, 1);
}
}
/* USER CODE END 1 */
9.添加全局变量
需要在 main.c 头部添加全局变量 Buffer
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
uint8_t Buffer[1];
/* USER CODE END PV */
需要在stm32f1xx_it.c 头部声明全局变量 Buffer
/* External variables --------------------------------------------------------*/
extern UART_HandleTypeDef huart1;
/* USER CODE BEGIN EV */
extern uint8_t Buffer[1];
/* USER CODE END EV */
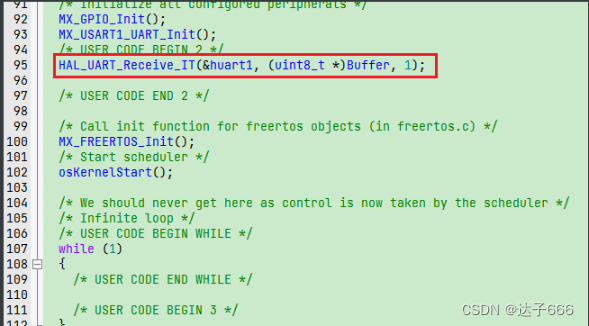
在 main.c 中,while 循环前,串口初始化后,添加接收中断开启函数
uint8_t Buffer[]="hello world";
HAL_UART_Receive_IT(&huart1,Buffer,1);
HAL_UART_Transmit_IT(&huart1,Buffer,sizeof(Buffer),100);
10.增加FreeRTOS支持
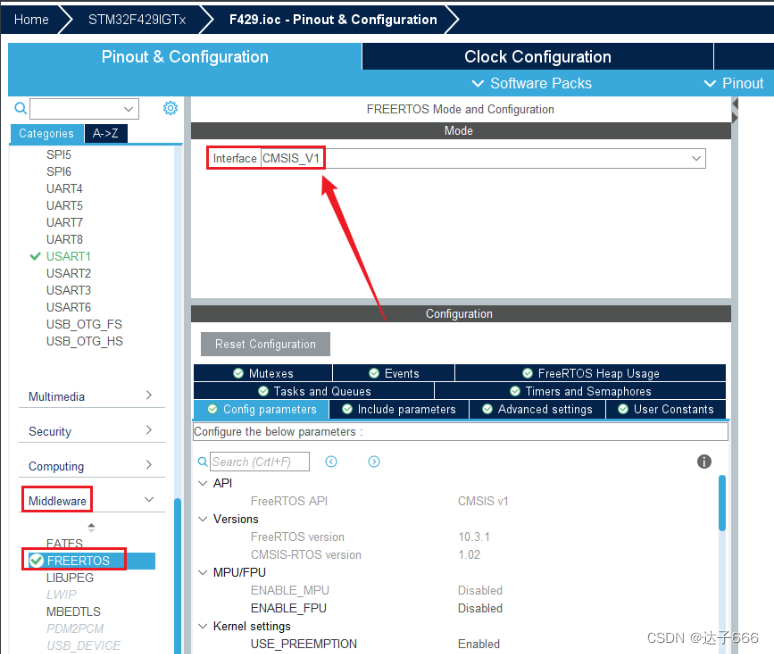
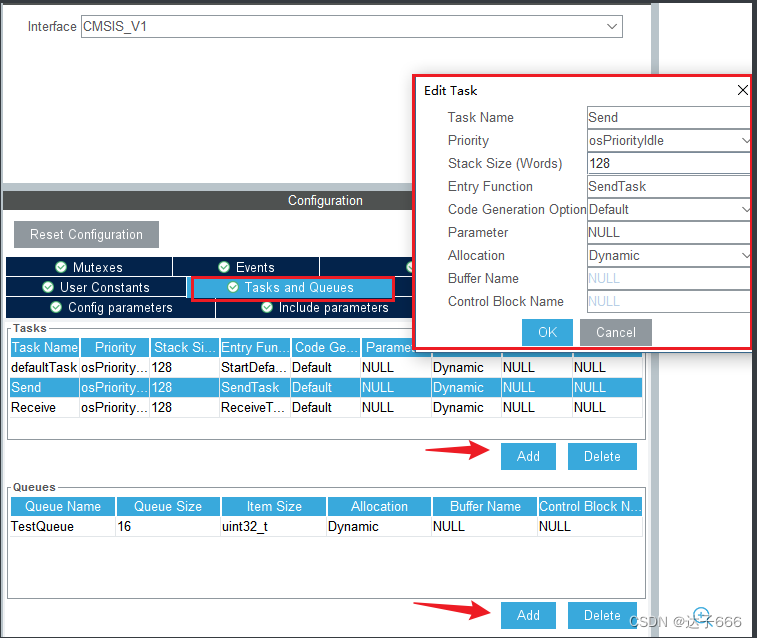
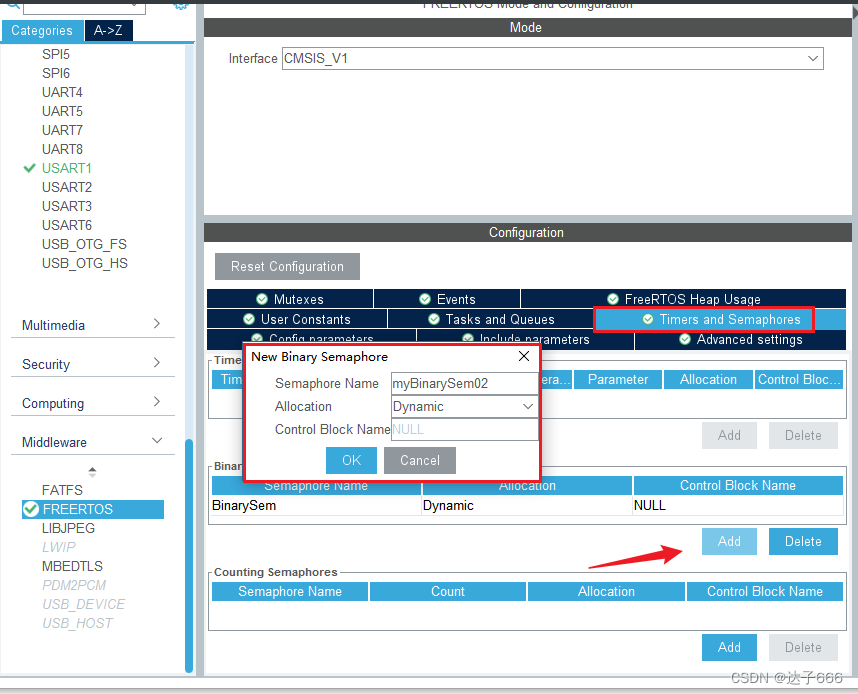
11.在FreeRTOS中添加源码
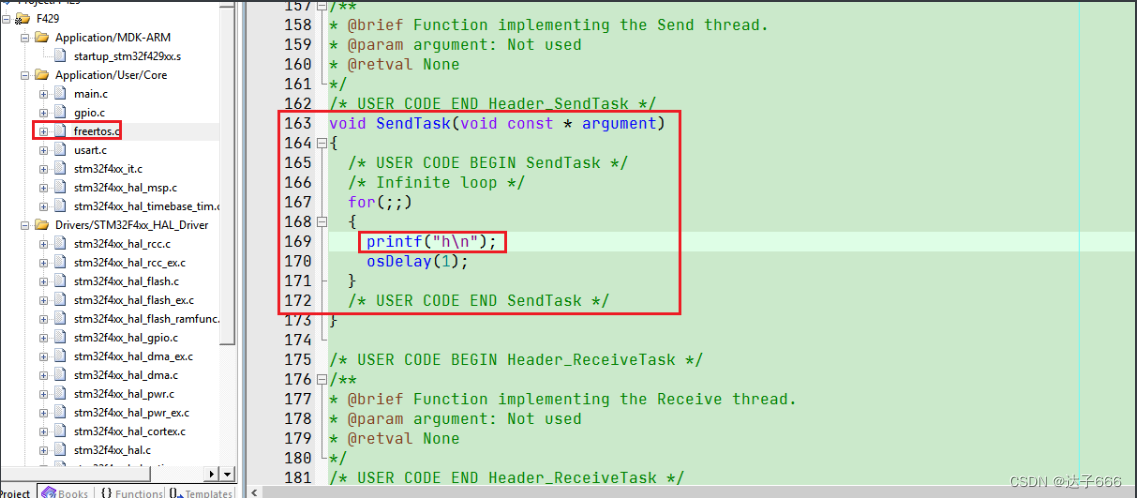
参考:https://www.jianshu.com/p/4f01bfd91e67


















 2045
2045

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









