







文章目录
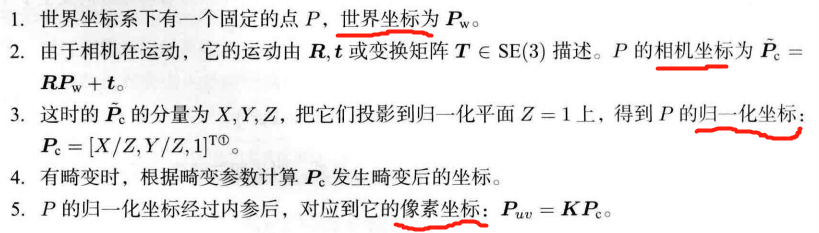
空间点 投影到 相机成像平面
前面内容总结:
1、机器人如何表示自身位姿
视觉SLAM: 观测主要是指 相机成像 的过程。
投影过程描述: 针孔 + 畸变
相机 内参 && 外参
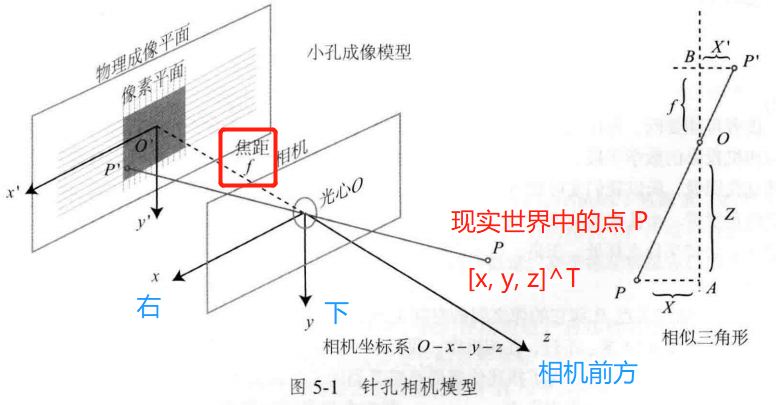

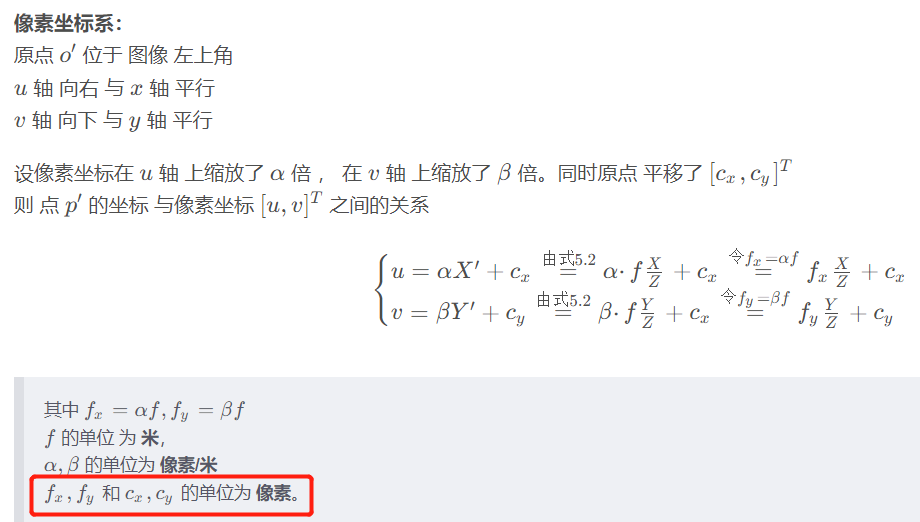
像素坐标系 与 成像平面之间,相差了一个缩放 和一个原点的平移。
像素坐标系:
原点
o
′
o^{\prime}
o′ 位于 图像 左上角
u
u
u 轴 向右 与
x
x
x 轴 平行
v
v
v 轴 向下 与
y
y
y 轴 平行
设像素坐标在
u
u
u 轴 上缩放了
α
\alpha
α 倍 , 在
v
v
v 轴 上缩放了
β
\beta
β 倍。同时原点 平移了
[
c
x
,
c
y
]
T
[c_x, c_y]^T
[cx,cy]T
则 点
p
′
p^{\prime}
p′ 的坐标 与像素坐标
[
u
,
v
]
T
[u, v]^T
[u,v]T 之间的关系
{
u
=
α
X
′
+
c
x
=
由式
5.2
α
⋅
f
X
Z
+
c
x
=
令
f
x
=
α
f
f
x
X
Z
+
c
x
v
=
β
Y
′
+
c
y
=
由式
5.2
β
⋅
f
Y
Z
+
c
x
=
令
f
y
=
β
f
f
y
Y
Z
+
c
y
\begin{equation*} \begin{cases} u = \alpha X^{\prime} + c_x \overset{由式5.2}{=} \alpha ·f\frac{X}{Z} + c_x \overset{令f_x = \alpha f}{=} f_x\frac{X}{Z} + c_x \\ v = \beta Y^{\prime} + c_y \overset{由式5.2}{=} \beta·f\frac{Y}{Z} + c_x \overset{令f_y = \beta f}{=} f_y\frac{Y}{Z} + c_y \end{cases} \end{equation*}
{u=αX′+cx=由式5.2α⋅fZX+cx=令fx=αffxZX+cxv=βY′+cy=由式5.2β⋅fZY+cx=令fy=βffyZY+cy
其中 f x = α f , f y = β f f_x = \alpha f, f_y=\beta f fx=αf,fy=βf
f f f 的单位 为 米,
α , β \alpha, \beta α,β 的单位为 像素/米
f x , f y f_x, f_y fx,fy 和 c x , c y c_x, c_y cx,cy 的单位为 像素。
[ u v 1 ] = [ f x 0 c x 0 f y c y 0 0 1 ] [ X Z Y Z 1 ] = 1 Z [ f x 0 c x 0 f y c y 0 0 1 ] [ X Y Z ] = d e f 1 Z K P \begin{align*}\begin{bmatrix}u\\ v\\ 1\end{bmatrix} &=\begin{bmatrix}f_x & 0 & c_x\\ 0 & f_y & c_y\\ 0 & 0 &1\end{bmatrix}\begin{bmatrix}\frac{X}{Z}\\ \frac{Y}{Z}\\ 1\end{bmatrix}\\ &=\frac{1}{Z}\begin{bmatrix}f_x & 0 & c_x\\ 0 & f_y & c_y\\ 0 & 0 &1\end{bmatrix}\begin{bmatrix}X\\ Y\\ Z\end{bmatrix}\\ &\overset{\mathrm{def}}{=} \frac{1}{Z}\bm{KP} \end{align*} uv1 = fx000fy0cxcy1 ZXZY1 =Z1 fx000fy0cxcy1 XYZ =defZ1KP
相机的内参数(Camera Intrinsics) 矩阵
K
\bm{K}
K
K = [ f x 0 c x 0 f y c y 0 0 1 ] \bm{K} = \begin{bmatrix}f_x & 0 & c_x\\ 0 & f_y & c_y\\ 0 & 0 &1\end{bmatrix} K= fx000fy0cxcy1
标定:自己确定相机的内参【相机生产厂商未告知相机内参的情形】
- 标定算法: 单目棋盘格张正友标定法
相机在运动 ——> P P P 的相机坐标 = 其世界坐标 P w \bm{P_\mathrm{w}} Pw 根据相机位姿转换到 相机坐标系下。
Z P u v = Z [ u v 1 ] = K ( R P w + t ) = K T P w Z\bm{P}_{uv}=Z\begin{bmatrix} u \\v \\1\end{bmatrix}=\bm{K(RP_{\mathrm{w}}+t)=KTP_\mathrm{w}} ZPuv=Z uv1 =K(RPw+t)=KTPw
相机的外参数(Camera Extrinsics):相机的位姿
R
\bm{R}
R ,
t
\bm{t}
t
机器人 或 自动驾驶: 外参 = 相机坐标系 到机器人本体坐标系 之间的 变换。
- 描述 相机安装在什么地方
5.1.2 畸变模型
径向畸变:透镜形状引起的畸变(失真)。坐标点 距离原点的长度发生了变化。
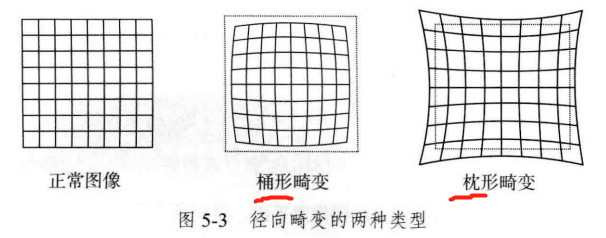
桶形畸变:图像放大率 随着 与光轴之间的距离 增加 而减小。
枕型畸变:图像放大率 随着 与光轴之间的距离 增加 而增加。
- 穿过图像中心和光轴有交点的直线还能保持形状不变。
切向畸变:相机在在组装过程中不能使 透镜和成像面 严格平行。水平夹角发行了变化。

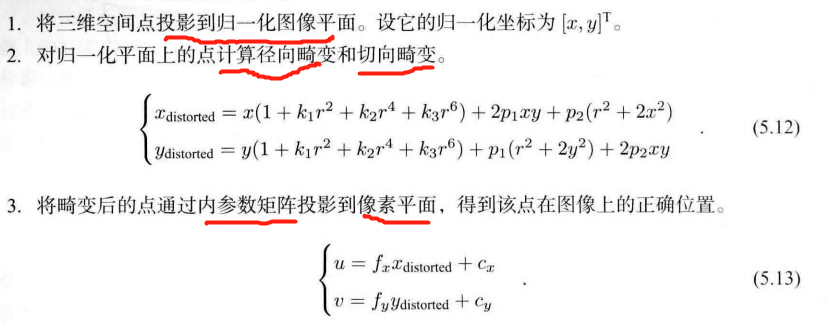
通过5个畸变系数( k 1 , k 2 , k 3 , p 1 , p 2 k_1,k_2,k_3,p_1,p_2 k1,k2,k3,p1,p2)找到某个点在像素平面的正确位置:
单目相机的成像过程
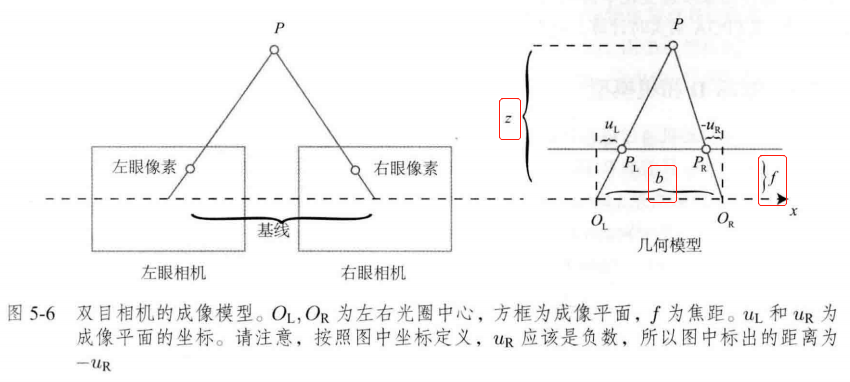
5.1.3 双目相机模型
z
−
f
z
=
b
−
u
L
+
u
R
b
\frac{z-f}{z}=\frac{b-u_L+u_R}{b}
zz−f=bb−uL+uR
令
d
=
u
L
−
u
R
令d = u_L-u_R
令d=uL−uR 视差
则 z − f z = b − d b \frac{z-f}{z}=\frac{b-d}{b} zz−f=bb−d
1 − f z = 1 − d b 1-\frac{f}{z}=1-\frac{d}{b} 1−zf=1−bd
f z = d b \frac{f}{z}=\frac{d}{b} zf=bd
z = f b d z=\frac{fb}{d} z=dfb
由于计算量的原因,双目深度估计需要使用 GPU 或 FPGA 来实时计算。
5.1.4 RGB-D 相机模型

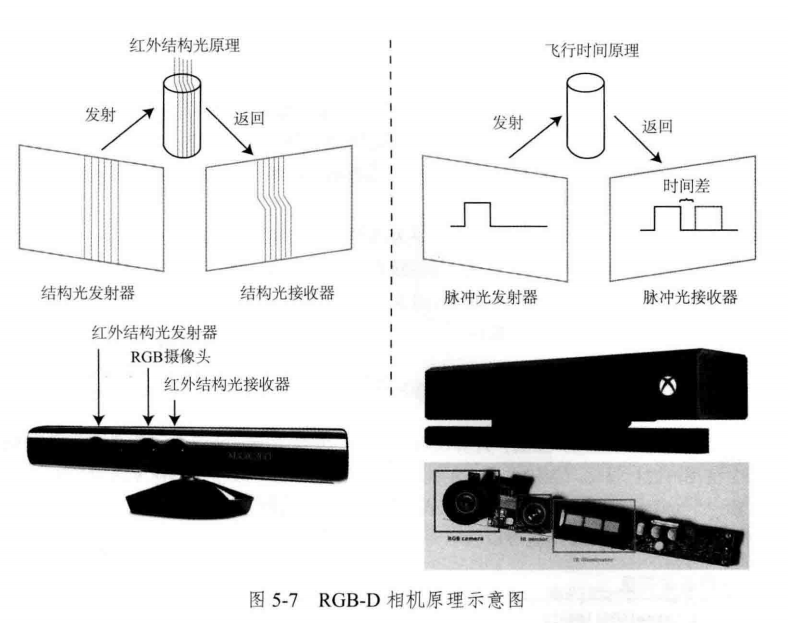
RGB-D 相机: 向探测目标 发射一束 光线(通常是红外光)。
RGB-D 不足:
1、用红外光进行深度测量,容易受到 日光或其他传感器发射的红外光干扰。不能在室外使用。
2、多个RGB-D相机之间也会相互干扰。
3、透射材质因为接收不到反射光,无法测量。
h
h
h 对应 行数
w
w
w 对应 列数
OpenCV: 通道顺序为 BGR

Eigen对于固定大小的矩阵使用起来效率更高。
实践
5.3.1 OpenCV 基础操作 【Code】
OpenCV版本查看
python3 -c "import cv2; print(cv2.__version__)"
可能报错
/home/xixi/Downloads/slambook2-master/ch5/basicuse/basicuse.cpp:6:9: fatal error: opencv2/core/core.cpp: No such file or directory
6 | #include<opencv2/core/core.cpp>
OpenCV没安装好
gtk/gtk.h报错链接
到 OpenCV 安装包
mkdir build && cd build
cmake ..
make -j4 # 之前 -j8有误,改4试试
sudo make install
——————————————————
mkdir build && cd build
cmake ..
make
./basicuse ubuntu.png ## ubuntu.png 要放在 build文件夹里; 或者提供该图片的绝对路径;或相对于build文件夹的相对路径
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(basicuse)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(basicuse basicuse.cpp)
# 链接OpenCV库
target_link_libraries(basicuse ${OpenCV_LIBS})
basicuse.cpp
#include<iostream>
#include<chrono> // 计时
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>// high-level graphical user interface
using namespace cv;
int main(int argc, char **argv){
// 读取argv[1] 指定的图像
cv::Mat image;
image = cv::imread(argv[1]); // 从命令行的第一个参数中 读取图像位置
// 判断图像是否 正确读取
if (image.data == nullptr){
cerr << "文件" << argv[1] << "不存在。" << endl;
return 0;
}
// 输出文件的基本信息
cout << "图像宽为" << image.cols << ",高为" << image.rows
<< ", 通道数为" << image.channels() << endl;
cv::imshow("image", image);
cv::waitKey(0); // 暂停程序,等待一个按键输入
cv::destroyAllWindows();
return 0;
}

#include<iostream>
#include<chrono> // 计时
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>// high-level graphical user interface
using namespace cv;
int main(int argc, char **argv){
// 读取argv[1] 指定的图像
cv::Mat image;
image = cv::imread(argv[1]); // 从命令行的第一个参数中 读取图像位置
// 判断image的类型
if (image.type() != CV_8UC1 && image.type() != CV_8UC3) {
// 图像类型不符合要求
cout << "请输入一张彩色图或灰度图." << endl;
return 0;
}
// 遍历图像, 请注意以下遍历方式亦可使用于随机像素访问
// 使用 std::chrono 来给算法计时
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
for (size_t y = 0; y < image.rows; y++) {
// 用cv::Mat::ptr获得图像的行指针
unsigned char *row_ptr = image.ptr<unsigned char>(y); // row_ptr是第y行的头指针
for (size_t x = 0; x < image.cols; x++) {
// 访问位于 x,y 处的像素
unsigned char *data_ptr = &row_ptr[x * image.channels()]; // data_ptr 指向待访问的像素数据
// 输出该像素的每个通道,如果是灰度图就只有一个通道
for (int c = 0; c != image.channels(); c++) {
unsigned char data = data_ptr[c]; // data为I(x,y)第c个通道的值
}
}
}
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast < chrono::duration < double >> (t2 - t1);
cout << "遍历图像用时:" << time_used.count() << " 秒。" << endl;
return 0;
}

#include<iostream>
#include<chrono> // 计时
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>// high-level graphical user interface
using namespace cv;
int main(int argc, char **argv){
// 读取argv[1] 指定的图像
cv::Mat image;
image = cv::imread(argv[1]); // 从命令行的第一个参数中 读取图像位置
// 关于 cv::Mat 的拷贝
// 直接赋值并不会拷贝数据 浅拷贝 会 同时修改原始数据
cv::Mat image_another = image;
// 修改 image_another 会导致 image 发生变化
image_another(cv::Rect(0, 0, 100, 100)).setTo(0); // 将左上角100*100的块置零
cv::imshow("image", image);
cv::waitKey(0);
// 使用clone函数来拷贝数据
cv::Mat image_clone = image.clone();
image_clone(cv::Rect(0, 0, 100, 100)).setTo(255);
cv::imshow("image", image);
cv::imshow("image_clone", image_clone);
cv::waitKey(0);
// 对于图像还有很多基本的操作,如剪切,旋转,缩放等,限于篇幅就不一一介绍了,请参看OpenCV官方文档查询每个函数的调用方法.
cv::destroyAllWindows();
return 0;
}
5.3.2 图像去畸变 【Code】
cv::Undistort()
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(myOpenCV)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(myOpenCV undistortImage.cpp)
# 链接OpenCV库
target_link_libraries(myOpenCV ${OpenCV_LIBS})
undistortImage.cpp
#include <opencv2/opencv.hpp>
#include <string>
using namespace std;
string image_file = "../distorted.png"; // 请确保路径正确
int main(int argc, char **argv) {
// 本程序实现去畸变部分的代码。尽管我们可以调用OpenCV的去畸变,但自己实现一遍有助于理解。
// 畸变参数
double k1 = -0.28340811, k2 = 0.07395907, p1 = 0.00019359, p2 = 1.76187114e-05;
// 内参
double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;
cv::Mat image = cv::imread(image_file, 0); // 图像是灰度图,CV_8UC1
int rows = image.rows, cols = image.cols;
cv::Mat image_undistort = cv::Mat(rows, cols, CV_8UC1); // 去畸变以后的图
// 计算去畸变后图像的内容
for (int v = 0; v < rows; v++) {
for (int u = 0; u < cols; u++) {
// 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted)
double x = (u - cx) / fx, y = (v - cy) / fy;
double r = sqrt(x * x + y * y);
double x_distorted = x * (1 + k1 * r * r + k2 * r * r * r * r) + 2 * p1 * x * y + p2 * (r * r + 2 * x * x);
double y_distorted = y * (1 + k1 * r * r + k2 * r * r * r * r) + p1 * (r * r + 2 * y * y) + 2 * p2 * x * y;
double u_distorted = fx * x_distorted + cx;
double v_distorted = fy * y_distorted + cy;
// 赋值 (最近邻插值)
if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows) {
image_undistort.at<uchar>(v, u) = image.at<uchar>((int) v_distorted, (int) u_distorted);
} else {
image_undistort.at<uchar>(v, u) = 0;
}
}
}
// 画图去畸变后图像
cv::imshow("distorted", image);
cv::imshow("undistorted", image_undistort);
cv::waitKey();
return 0;
}

5.4.1 双目视觉 视差图 点云 【Code】


CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(stereoVision)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
find_package(Pangolin REQUIRED)
add_executable(stereoVision stereoVision.cpp)
target_link_libraries(stereoVision ${OpenCV_LIBS} ${Pangolin_LIBRARIES})
stereoVision.cpp
#include <opencv2/opencv.hpp>
#include <vector>
#include <string>
#include <Eigen/Core>
#include <pangolin/pangolin.h>
#include <unistd.h>
using namespace std;
using namespace Eigen;
// 文件路径
string left_file = "../left.png";
string right_file = "../right.png";
// 在pangolin中画图,已写好,无需调整
void showPointCloud(
const vector<Vector4d, Eigen::aligned_allocator<Vector4d>> &pointcloud);
int main(int argc, char **argv) {
// 内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 基线
double b = 0.573;
// 读取图像
cv::Mat left = cv::imread(left_file, 0);
cv::Mat right = cv::imread(right_file, 0);
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(
0, 96, 9, 8 * 9 * 9, 32 * 9 * 9, 1, 63, 10, 100, 32); // 神奇的参数
cv::Mat disparity_sgbm, disparity;
sgbm->compute(left, right, disparity_sgbm);
disparity_sgbm.convertTo(disparity, CV_32F, 1.0 / 16.0f);
// 生成点云
vector<Vector4d, Eigen::aligned_allocator<Vector4d>> pointcloud;
// 如果你的机器慢,请把后面的v++和u++改成v+=2, u+=2
for (int v = 0; v < left.rows; v++)
for (int u = 0; u < left.cols; u++) {
if (disparity.at<float>(v, u) <= 0.0 || disparity.at<float>(v, u) >= 96.0) continue;
Vector4d point(0, 0, 0, left.at<uchar>(v, u) / 255.0); // 前三维为xyz,第四维为颜色
// 根据双目模型计算 point 的位置
double x = (u - cx) / fx;
double y = (v - cy) / fy;
double depth = fx * b / (disparity.at<float>(v, u));
point[0] = x * depth;
point[1] = y * depth;
point[2] = depth;
pointcloud.push_back(point);
}
cv::imshow("disparity", disparity / 96.0);
cv::waitKey(0);
// 画出点云
showPointCloud(pointcloud);
return 0;
}
void showPointCloud(const vector<Vector4d, Eigen::aligned_allocator<Vector4d>> &pointcloud) {
if (pointcloud.empty()) {
cerr << "Point cloud is empty!" << endl;
return;
}
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glPointSize(2);
glBegin(GL_POINTS);
for (auto &p: pointcloud) {
glColor3f(p[3], p[3], p[3]);
glVertex3d(p[0], p[1], p[2]);
}
glEnd();
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
return;
}
视差图:
byzanz-record -x 147 -y 76 -w 1386 -h 768 -d 15 --delay=5 -c /home/xixi/myGIF/test.gif


5.4.2 RGB-D 点云 拼合成 地图【Code】
通过物理方法 获得 像素深度信息


mkdir build && cd build
cmake ..
make
./joinMap
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(joinMap)
# 添加C++ 11 标准支持 nullptr chrono
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 寻找 OpenCV 库
find_package(OpenCV 4.2.0 REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
# Sophus 库
find_package(Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
# Pangolin 库
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
add_executable(joinMap joinMap.cpp)
target_link_libraries(joinMap ${OpenCV_LIBS} ${Pangolin_LIBRARIES} ${Sophus_LIBRARIES})
# 上面这句 一定要 链接到 Sophus
joinMap.cpp
#include <iostream>
#include <fstream>
#include <opencv2/opencv.hpp>
#include <boost/format.hpp> // for formating strings
#include <pangolin/pangolin.h>
#include <sophus/se3.h>
using namespace Sophus; // 原代码少了 这句
using namespace std;
typedef vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> TrajectoryType;
typedef Eigen::Matrix<double, 6, 1> Vector6d;
// 在pangolin中画图,已写好,无需调整
void showPointCloud(
const vector<Vector6d, Eigen::aligned_allocator<Vector6d>> &pointcloud);
int main(int argc, char **argv) {
vector<cv::Mat> colorImgs, depthImgs; // 彩色图和深度图
TrajectoryType poses; // 相机位姿
ifstream fin("../pose.txt");
if (!fin) {
cerr << "请在有pose.txt的目录下运行此程序" << endl;
return 1;
}
for (int i = 0; i < 5; i++) {
boost::format fmt("../%s/%d.%s"); //图像文件格式 // !! 这里的路径也要改
colorImgs.push_back(cv::imread((fmt % "color" % (i + 1) % "png").str()));
depthImgs.push_back(cv::imread((fmt % "depth" % (i + 1) % "pgm").str(), -1)); // 使用-1读取原始图像
double data[7] = {0};
for (auto &d:data)
fin >> d;
Sophus::SE3 pose(Eigen::Quaterniond(data[6], data[3], data[4], data[5]),
Eigen::Vector3d(data[0], data[1], data[2]));
poses.push_back(pose);
}
// 计算点云并拼接
// 相机内参
double cx = 325.5;
double cy = 253.5;
double fx = 518.0;
double fy = 519.0;
double depthScale = 1000.0;
vector<Vector6d, Eigen::aligned_allocator<Vector6d>> pointcloud;
pointcloud.reserve(1000000);
for (int i = 0; i < 5; i++) {
cout << "转换图像中: " << i + 1 << endl;
cv::Mat color = colorImgs[i];
cv::Mat depth = depthImgs[i];
Sophus::SE3 T = poses[i];
for (int v = 0; v < color.rows; v++)
for (int u = 0; u < color.cols; u++) {
unsigned int d = depth.ptr<unsigned short>(v)[u]; // 深度值
if (d == 0) continue; // 为0表示没有测量到
Eigen::Vector3d point;
point[2] = double(d) / depthScale;
point[0] = (u - cx) * point[2] / fx;
point[1] = (v - cy) * point[2] / fy;
Eigen::Vector3d pointWorld = T * point;
Vector6d p;
p.head<3>() = pointWorld;
p[5] = color.data[v * color.step + u * color.channels()]; // blue
p[4] = color.data[v * color.step + u * color.channels() + 1]; // green
p[3] = color.data[v * color.step + u * color.channels() + 2]; // red
pointcloud.push_back(p);
}
}
cout << "点云共有" << pointcloud.size() << "个点." << endl;
showPointCloud(pointcloud);
return 0;
}
void showPointCloud(const vector<Vector6d, Eigen::aligned_allocator<Vector6d>> &pointcloud) {
if (pointcloud.empty()) {
cerr << "Point cloud is empty!" << endl;
return;
}
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glPointSize(2);
glBegin(GL_POINTS);
for (auto &p: pointcloud) {
glColor3d(p[3] / 255.0, p[4] / 255.0, p[5] / 255.0);
glVertex3d(p[0], p[1], p[2]);
}
glEnd();
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
return;
}
byzanz-record -x 72 -y 64 -w 998 -h 605 -d 15 --delay=5 -c /home/xixi/myGIF/test.gif

习题
待做:
- 找OpenCV里的标定 方法
- 整理链接里的内容
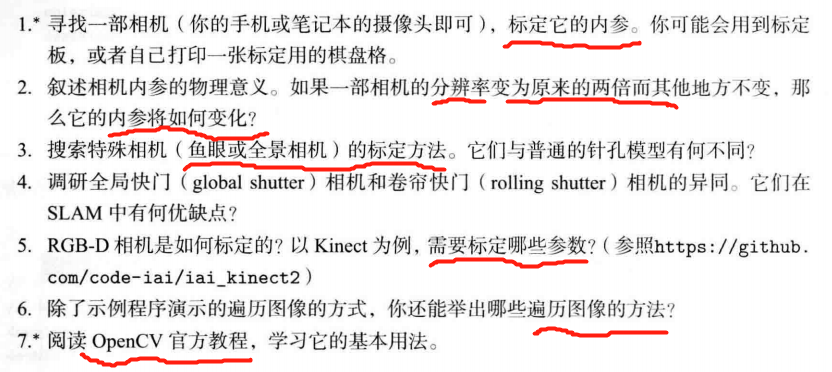
题1
相机内参标定
√ 题2
相机内参 K \bm{K} K 的物理意义:可将世界坐标系某点 P P P 的归一化坐标 转成 像素坐标。 P u v = K [ X / Z , Y / Z , 1 ] T \bm{P_{uv}=K}[X/Z,Y/Z, 1]^T Puv=K[X/Z,Y/Z,1]T
图像分辨率指图像中存储的信息量,是每英寸图像内有多少个像素点,分辨率的单位为PPI(Pixels Per Inch),通常叫做像素每英寸。
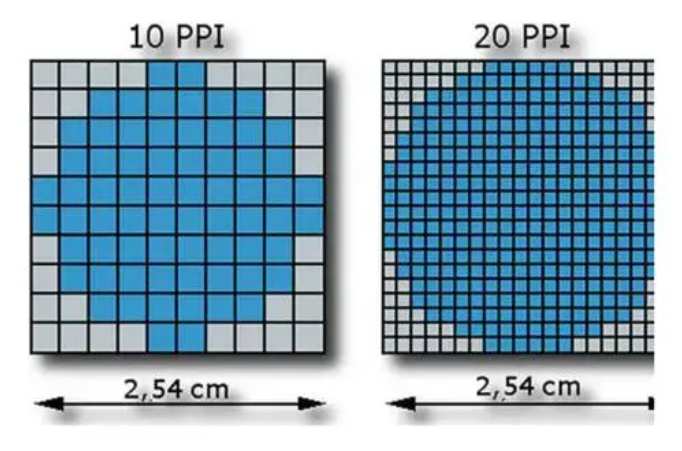
当分辨率变为原来的两倍时, 显然对于同一位置,以像素为单位的
c
x
c_x
cx 和
c
y
c_y
cy 均变为原来的2倍。而以 像素/每米 为单位的
α
\alpha
α 和
β
\beta
β 变成原来的 2 倍。
f
f
f 不变,则
f
x
=
α
f
f_x = \alpha f
fx=αf 和
f
y
=
β
f
f_y = \beta f
fy=βf 也变为原来的 2 倍。
综上:当相机的分辨率变为原来的2倍时,
c
x
c_x
cx ,
c
y
c_y
cy ,
f
x
f_x
fx ,
f
y
f_y
fy 均变为原来的 2 倍。
题3
鱼眼或全景相机 标定
链接1
链接2
————————————
√ 题4
异同:
工业相机常见的曝光方式:
1、全局曝光(Global shutter,也称全局快门、帧曝光)
- 当光圈打开时,工业相机中的图像传感器上所有像素点可以在同一时刻曝光,当光圈关闭后,所有像素同时结束曝光,然后输出像素数据。全局曝光的工业相机可以一次拍摄物体的整体图像后再输出,因此在拍摄高速运动物体时图像不会偏移,能够达到无失真的效果。
CCD(电荷耦合)元件 为这种曝光 方式
2、卷帘曝光(Rolling shutter,也称卷帘快门、行曝光)
- 采用的是逐行扫描逐行曝光的方式,当上一行的所有像素同时曝光后,下一行的所有像素再同时曝光,直至所有行曝光完成。
- 当曝光不当或物体移动较快时,会出现部分曝光(partial exposure)、斜坡图形(skew)、晃动(wobble) 等现象。这种Rolling shutter方式拍摄出现的现象,称为“果冻效应”。
- 大部分
CMOS相机使用卷帘快门(rolling shutter)
3、基于卷帘曝光并结合全局曝光优势的全局复位释放曝光(Global Reset Release Shutter,GRR)
优缺点:
Global shutter适用于拍摄高速运动物体;且在光线有明暗变化的时候,Global shutter sensor不会有明暗瑕疵。
Global shutter需要对每个像素都要增加一个存储单元,这样增加了sensor的生产难度以及成本。
Rolling Shuttersensor适用于拍摄运动速度相对较慢的物体或场景,可获得更高的成像信噪比。 Rolling Shutter 在低噪、像素损失、高感、动态范围等有优势。
————————
题5
RGB-D 相机标定

题6
题7
OpenCV官方教程学习
官方文档


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









