 分享
分享
孙 悟 空
激光点云数据处理
展开
-
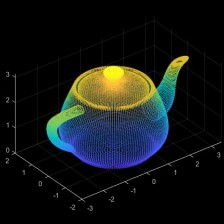
MATLAB点云数据处理(二十九):可视化点云之pcshow参数详解与快捷键操作
本文详细介绍了MATLAB点云处理工具中的pcshow点云可视化方法,通过剖析每一个参数,真正掌握pcshow方法。包括自定义点的大小、背景颜色、坐标轴、坐标平面、点云方向、投影方式、渲染方式等。原创 2023-03-01 17:39:06 · 2415 阅读 · 2 评论 -
MATLAB点云处理(二十八):基于格网法与平面拟合的道路点云与非道路点云分割
本文介绍了如何在道路场景下,采用格网法和平面拟合的方式,从点云数据中提取道路点云和非道路点云。原创 2023-01-19 09:51:54 · 2302 阅读 · 3 评论 -
MATLAB点云处理(二十七):简单形态学地面滤波SMRF(segmentGroundSMRF)
本文介绍了一种简单形态学地面滤波方法,并给出代码实现。原创 2023-01-17 19:22:29 · 1830 阅读 · 0 评论 -
MATLAB点云处理(二十六):将无序点云转换为有序点云(pcorganize),删除无效点(removeInvalidPoints)
什么是点云?什么是无序点云?什么是有序点云?如何将无序点云转换为有序点云?如何删除有序点云中的无效点?什么?你也有这些疑问,还不赶紧点进来!原创 2022-08-10 10:43:28 · 3278 阅读 · 2 评论 -
MATLAB点云处理(二十五):点云生成 DEM(pc2dem)
本文介绍了MATLAB使用pc2dem()函数从点云中生成DTM和DSM的方法。原创 2022-06-06 11:17:41 · 3029 阅读 · 4 评论 -
MATLAB点云处理(二十四):点云中值滤波(pcmedian)
本文介绍了MATLAB中的点云中值滤波函数pcmedian,包括中值滤波原理、代码实现和结果展示三部分。原创 2022-06-04 18:06:19 · 2473 阅读 · 3 评论 -
MATLAB点云处理(二十三):读写LAS点云(lasFileReader | lasFileWriter)
本文介绍了MATLAB读写LAS/LAZ点云的方法,并给出代码示例。原创 2022-04-30 15:37:42 · 3694 阅读 · 1 评论 -
MATLAB点云处理(二十二):欧式聚类分割----独立窗口显示每一聚类结果----保存聚类点云
本文介绍了MATLAB进行点云欧式聚类的方法,并能在独立的窗口显示每一个聚类结果,也可根据需求选择是否保存每一个聚类。原创 2021-08-20 10:25:00 · 3024 阅读 · 14 评论 -
MATLAB点云处理(二十一):点云旋转、平移(详细解读❤️❤️❤️)
本文介绍了点云刚体变换的坐标变换矩阵(旋转矩阵+平移向量),并给出了MATLAB实现点云刚体变换的方法。原创 2021-08-04 15:15:52 · 5860 阅读 · 16 评论 -
MATLAB点云处理(二十):三维刚体几何变换矩阵(regid3d)与仿射几何变换矩阵(affine3d)
本文介绍了MATLAB中的刚体变换矩阵和仿射变换矩阵原创 2021-08-03 16:08:11 · 4208 阅读 · 3 评论 -
MATLAB点云处理(十九):点云合并(pcmerge)
本文介绍了MATLAB将两个点云进行合并的方法原创 2021-08-03 11:27:09 · 3672 阅读 · 2 评论 -
MATLAB点云处理(十八):直线拟合(最小二乘 | RANSAC)
本文介绍了MATLAB最小二乘直线拟合和RANSAC直线拟合的方法原创 2021-08-01 14:42:27 · 4294 阅读 · 6 评论 -
MATLAB点云处理(十七):最小二乘多项式曲线拟合
本文介绍了MATLAB最小二乘多项式曲线拟合的方法原创 2021-08-01 10:57:35 · 2463 阅读 · 5 评论 -
MATLAB点云处理(十六):多项式曲线拟合(RANSAC | MSAC)
本文介绍了MATLAB二维数据点RANSAC多项式拟合的方法与实现原创 2021-07-30 15:56:36 · 4462 阅读 · 4 评论 -
MATLAB点云处理(十五):球面拟合(RANSAC | MSAC)
本文详细介绍了MATLAB中的RANSAC球面拟合方法与实现原创 2021-07-30 11:28:52 · 5065 阅读 · 0 评论 -
MATLAB点云处理(十四):圆柱体拟合(RANSAC | MSAC)
本文详细介绍了MATLAB中的RANSAC圆柱体拟合方法与实现原创 2021-07-28 16:57:48 · 5919 阅读 · 9 评论 -
MATLAB点云处理(十三):平面拟合(RANSAC | MASC)
本文详细介绍了MATLAB中的RANSAC平面拟合方法与实现原创 2021-07-26 20:44:56 · 8364 阅读 · 12 评论 -
MATLAB点云处理(十二):欧式聚类分割(pcsegdist)
本文介绍了MATLAB中点云欧式聚类分割方法。原创 2021-07-25 16:54:29 · 5045 阅读 · 6 评论 -
MATLAB点云处理(十一):点云法向量估计(pcnormals)
本文介绍了MATLAB计算点云法向量的方法,并进行法线一致性定向。原创 2021-07-25 16:02:59 · 4659 阅读 · 8 评论 -
MATLAB点云处理(十):点云下采样(random | gridAverage | nonuniformGridSample)
本文介绍了MATLAB三种下采样方式:随机下采样、均匀体素下采样、非均匀体素下采样。同时给出了实现代码和测试结果原创 2021-07-24 11:57:24 · 4236 阅读 · 8 评论 -
MATLAB点云处理(九):统计滤波 | 点云去噪(pcdenoise)
本文介绍了MATLAB进行点云去噪的方法,其原理为统计滤波原创 2021-07-23 21:39:17 · 11642 阅读 · 12 评论 -
MATLAB点云处理(八):为点云添加高斯噪声
本文对如何借助MATLAB,为点云添加高斯噪声做出了说明,并给出实现代码。原创 2021-07-23 15:14:41 · 2415 阅读 · 13 评论 -
MATLAB点云处理(七):为点云添加均匀分布的随机噪声
本文对如何借助MATLAB,为点云添加均匀分布的随机噪声做出了说明,并给出实现代码。原创 2021-07-23 14:29:40 · 2166 阅读 · 11 评论 -
MATLAB点云处理(六):可视化点云(pcshow | pcshowpair | pcpalyer | showShape)
本文介绍了MATLAB可视化点云的四种方法,方便学习。原创 2021-07-15 17:48:48 · 12537 阅读 · 14 评论 -
MATLAB点云处理(五):点云赋色 | 显示自定义颜色的点云
本文主要介绍了MATLAB如何进行点云赋色以及如何显示自定义颜色的点云,同时说明了两者的区别。原创 2021-07-14 22:13:07 · 6203 阅读 · 16 评论 -
MATLAB点云处理(四):查找感兴趣区域(ROI)内的点
本文详细介绍了如何使用MATLAB查找并输出感兴趣区域点云原创 2021-07-14 20:23:08 · 4281 阅读 · 10 评论 -
MATLAB点云处理(三):kd树近邻搜索(K近邻 | 半径R近邻)
本文介绍了MATLAB进行点云邻域搜索的两种方法与实现原创 2021-07-14 11:09:38 · 5369 阅读 · 14 评论 -
MATLAB点云处理(二):点云存储对象类型(pcviewset | pointCloud)
MATLAB 点云工具箱提供了两种形式的点云存储对象类型,本文主要介绍了pointCloud类型。原创 2021-07-14 10:35:18 · 3468 阅读 · 1 评论 -
MATLAB点云处理(一):读写PCD | PLY点云(pcread | pcwrite)
本文介绍了MATLAB读写PCD | PLY点云的详细内容原创 2021-07-13 17:22:52 · 8638 阅读 · 39 评论