







 本文详细介绍了扫地机器人的工作原理,包括激光导航传感器、麦克风和激光雷达的作用,以及主控、微控制器和数字信号处理器在路径规划和执行控制中的角色。组创微电子作为解决方案提供商,强调了核心技术在导航和人性化设计上的关键性。
本文详细介绍了扫地机器人的工作原理,包括激光导航传感器、麦克风和激光雷达的作用,以及主控、微控制器和数字信号处理器在路径规划和执行控制中的角色。组创微电子作为解决方案提供商,强调了核心技术在导航和人性化设计上的关键性。
当前,扫地机器人非常流行,今天讲解一下组创微电子这套扫地机器人解决方案,让我们来认识一下扫地机器人的工作原理和硬件构成。
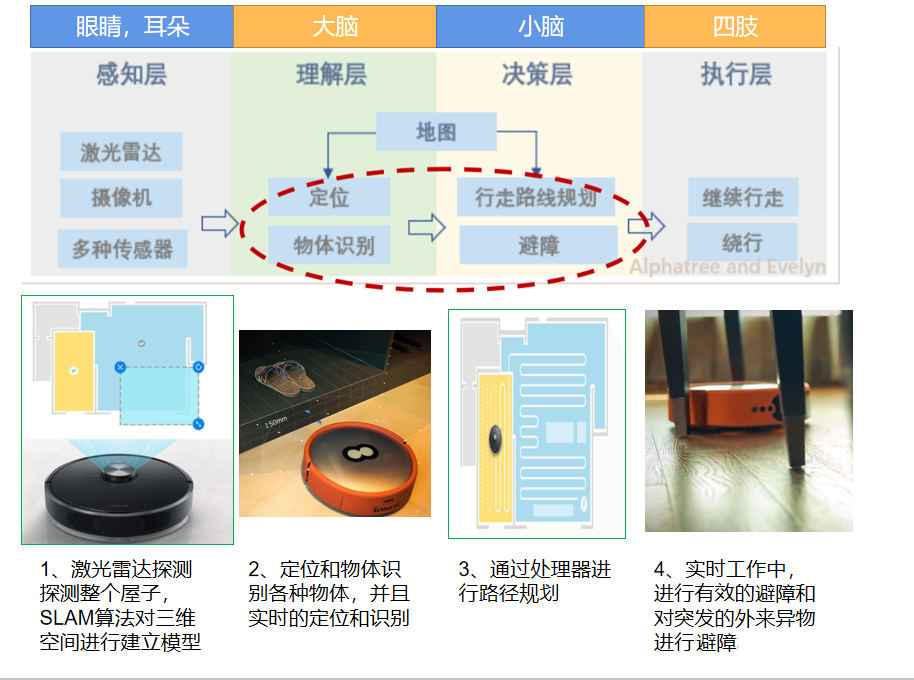
扫地机器人眼睛,耳朵,如何知道房间是什么样子?房间里柜子,鞋子,床,座椅,人都在什么地方?他能不能知道这些东西都是什么?激光导航传感器,主要是构建反射物的轮廓,通过轮廓来对比这个物体大致的现实产品。
扫地机器人的耳朵:其实就是麦克风。一个麦克风+CPU芯片中的语音智能算法,扫地机器人就可以跟你对答如流了。
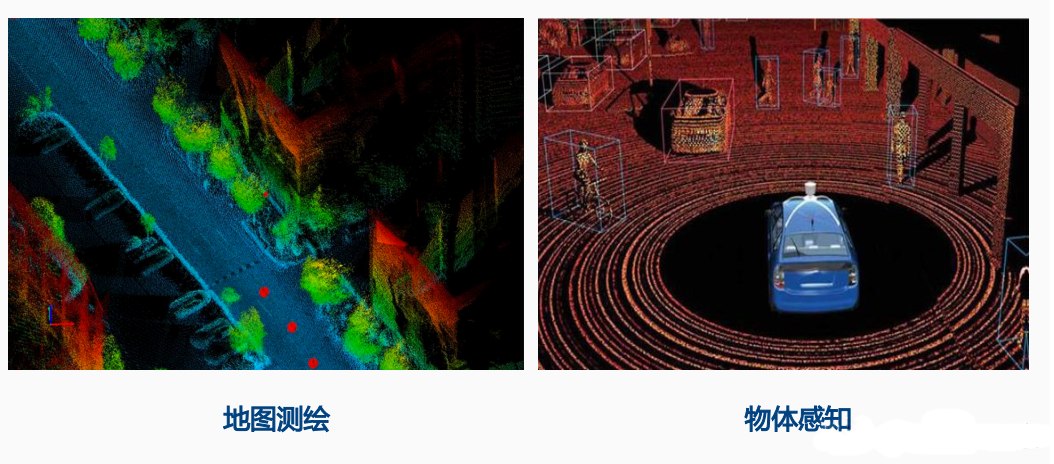
扫地机器人的眼睛:就是激光雷达,激光雷达主要用来测量距离和识别物体。

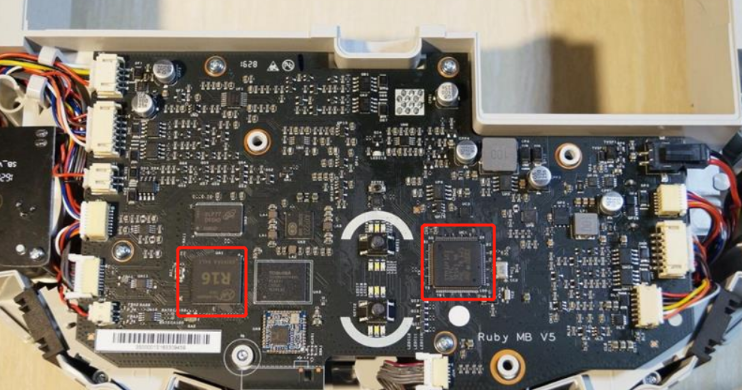
大脑+小脑,也就是扫地机器人的核心处理器:3大核心处理器

1、主控制芯片主要用来做上层应用。包括操作系统及语音,视觉,UI界面交互都是由主控芯片管理,例如小米扫地机器人使用的Allwinner ARM Cortel-A7架构的四核处理器。
2、微控制器主要用来进行路径规划。运行SLAM导航算法,建立房间虚拟三维空间地图。
3、数字信号处理器。这主要是为控制芯片进行路径规划后,下发指令给执行的电机,包括舵轮(扫地机人前进,转向的轮子),扫地刷的电机,吸尘器的电机,让这些电机工作。
扫地机器人的大脑主要用来规划路径,避障,以及人机交互,例如:人类设定打扫范围,以及语音指导扫地机器人进行打扫,都需要处理器进行处理后,将指令下发到执行机构。
小脑属于跟执行层最近的控制区域,例如我们上面说的,后面两个处理器:数字信号处理器和微控制器都是对执行层(电机),进行控制和回馈外部信息的处理器。
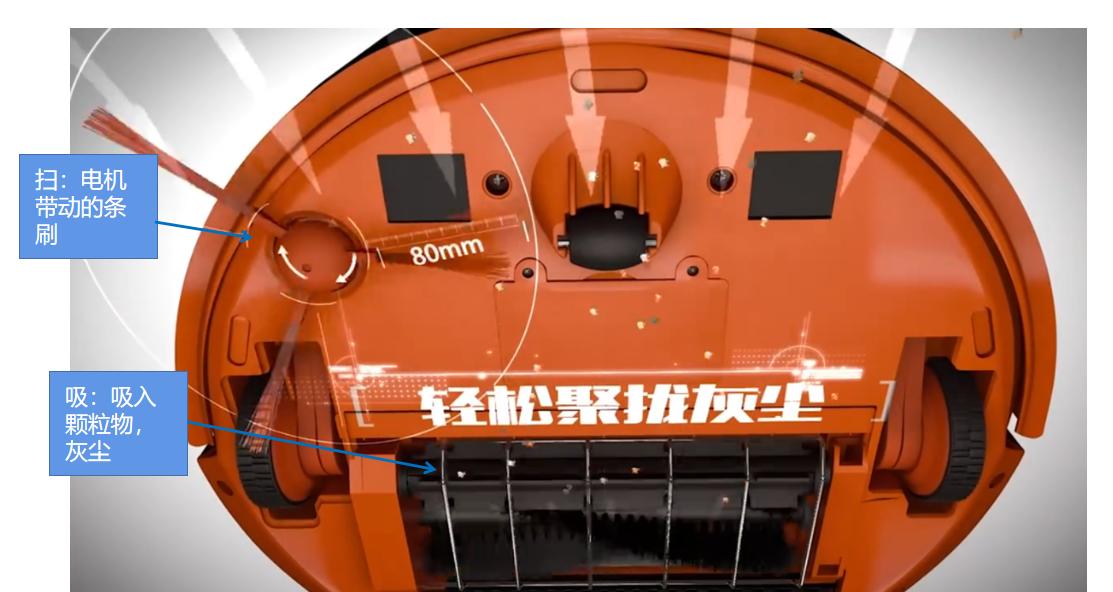
扫地机器人执行机构为三种:
行走的舵机,扫地的电机,吸尘器电机。扫起来的灰尘被吸入存储区就是扫地机器人的工作过程。
所以行业内的扫地机器人厂商,核心技术基本上都聚焦在激光导航和路径规划上面,还有会添加一些人性化的设计,例如语音互动等等。

深圳市组创微电子有限公司20年电子电器方案开发设计及芯片代理公司,专注于扫地机器人解决方案设计,迷你筋膜枪方案设计,同时可提供MCU、语音IC、蓝牙IC与模块、wifi模块。开发能力涵盖了PCB设计、单片机开发、软件定制开发、APP定制开发、微信公众号开发等软硬件设计。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









