






摘要
本文基于STM32CubeIDE开发环境,通过可复现的优先级反转实验揭示RTOS系统中的这一经典问题,并深入讲解如何使用FreeRTOS互斥锁的优先级继承机制解决问题。内容包含:问题现象复现、CubeMX配置要点、两种解决方案对比(优先级继承/天花板)。
1. 什么是优先级反转和优先级继承
1.1 优先级反转
定义
高优先级任务因等待被低优先级任务占用的共享资源,间接被中优先级任务阻塞的现象。
发生条件
-
存在至少三个不同优先级的任务(Low/Mid/High)
-
共享资源使用无优先级继承的同步机制(如二值信号量)
例子
现在有 3 个任务分别为 H 任务(High)、M 任务(Middle)、L 任务 (Low),3 个任务的优先级顺序为 H 任务>M 任务>L 任务。正常运行的时候 H 任务可以 打断 M任务与 L 任务,M 任务可以打断 L 任务,假设系统中有一个资源被保护了,此时该 资源被 L 任务正在使用中,某一刻,H 任务需要使用该资源,但是 L 任务还没使用完,H 任务则因为申请不到资源而进入阻塞态,L 任务继续使用该资源,此时已经出现了“优先级翻转”现象,高优先级任务在等着低优先级的任务执行,如果在 L 任务执行的时候刚好 M 任务被唤醒了,由于 M 任务优先级比 L 任务优先级高,那么会打断 L 任务,抢占了 CPU 的使用权,直到 M 任务执行完,再把 CUP 使用权归还给 L 任务,L 任务继续执行, 等到执行完毕之后释放该资源,H 任务此时才从阻塞态解除,使用该资源。这个过程,本 来是最高优先级的 H 任务,在等待了更低优先级的 L 任务与 M 任务,其阻塞的时间是 M 任务运行时间+L 任务运行时间,这只是只有 3 个任务的系统,假如很多个这样子的任务打 断最低优先级的任务,那这个系统最高优先级任务岂不是崩溃了,这个现象是绝对不允许出现的,高优先级的任务必须能及时响应。所以,没有优先级继承的情况下,使用资源保 护,其危害极大。
典型场景
| 时间 | Low (Prio=1) | Mid (Prio=2) | High (Prio=3) |
|---|---|---|---|
| t1 | 获取锁 | 就绪 | 就绪 |
| t2 | 执行临界区 | 抢占CPU | 请求锁(阻塞) |
| t3 | 被Mid抢占 | 持续运行 | 持续阻塞 |
| t4 | 恢复执行并释放锁 | - | 终于获得锁 |
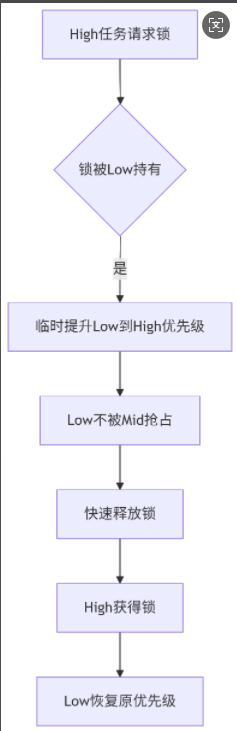
1.2 优先级继承
定义
当高优先级任务因资源阻塞时,系统临时提升低优先级任务的优先级至与等待者相同,使其快速释放资源。
工作原理
优化效果对比
| 指标 | 无继承 | 有继承 |
|---|---|---|
| High任务阻塞时间 | 依赖Mid任务执行 | 仅临界区执行时间 |
| 系统实时性 | 不可预测 | 确定性保障 |
| CPU利用率 | 可能100%占用 | 按需分配 |
1.3 优先级反转的危害
(1) 实时性失效
-
案例:火星探路者号(1997年)因优先级反转导致系统重启
-
数据:高优先级任务响应延迟可能增长10-100倍
(2) 死锁风险
当存在多个锁时,可能形成环形等待:
HighTask → 等待LockA(被MidTask持有) MidTask → 等待LockB(被LowTask持有) LowTask → 等待LockA(被HighTask持有)
(3) 资源浪费
| 场景 | CPU有效利用率 |
|---|---|
| 正常调度 | 85%~95% |
| 优先级反转发生时 | <40% |
(4) 调试困难
-
现象随机出现(依赖任务调度顺序)
-
传统调试工具难以捕获(需RTOS-aware调试器如SystemView)
1.4 总结图表
优先级反转 vs 优先级继承
| 特性 | 优先级反转 | 优先级继承 |
|---|---|---|
| 触发条件 | 无保护的共享资源访问 | 高优先级任务请求被占用的互斥锁 |
| 系统行为 | 高优先级被中优先级间接阻塞 | 低优先级临时升权避免被抢占 |
| 最坏延迟 | 不可预测 | =临界区执行时间 |
| 解决方案 | 互斥锁+优先级继承/天花板协议 | FreeRTOS默认支持 |
通过上述分析可见,优先级反转会严重破坏实时系统的确定性,而优先级继承是解决该问题的有效机制。在实际工程中,建议对所有共享资源使用带优先级继承的互斥锁(非二值信号量)。
2. 优先级反转问题重现
2.1 实验环境搭建
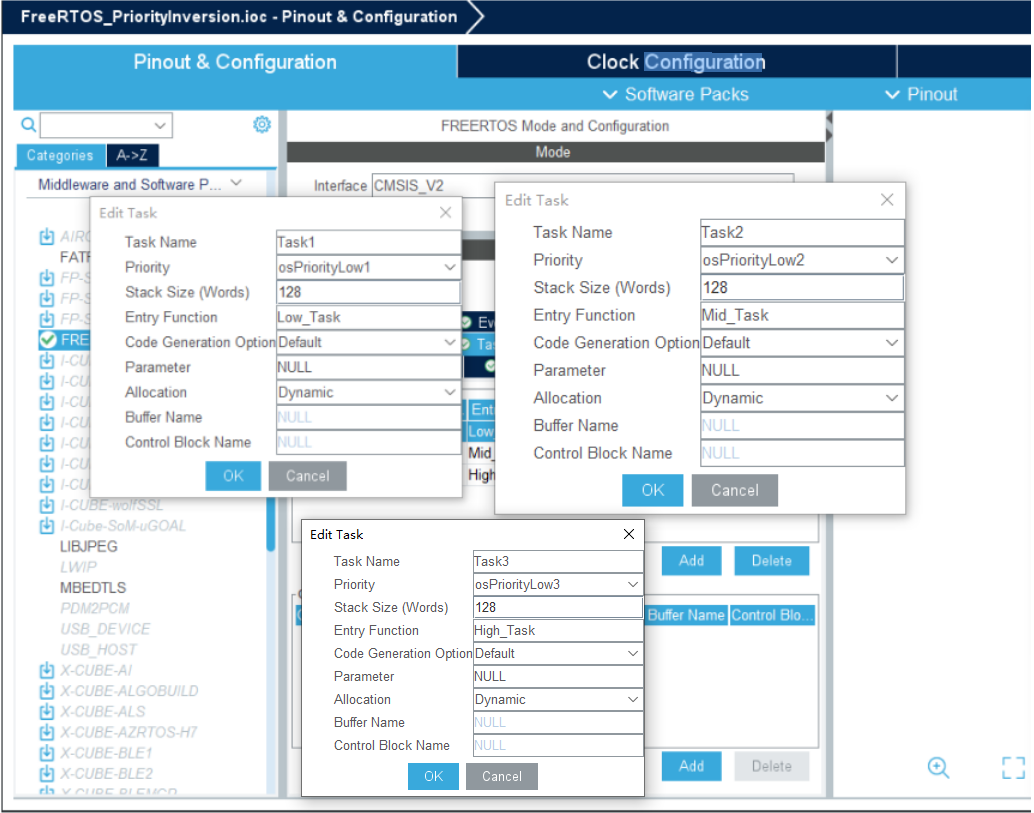
CubeMX配置
-
启用FreeRTOS(CMSIS_V2接口)
-
创建三个任务:
任务名称 优先级 功能描述 HighTask 3 访问共享资源 MidTask 2 计算密集型任务 LowTask 1 长时间占用共享资源
添加信号量

2.2 问题现象代码
//低优先级任务
void Low_Task(void *argument) {
/* USER CODE BEGIN Low_Task */
/* Infinite loop */
for (;;) {
xSemaphoreTake(BinarySemHandle, portMAX_DELAY); // 获取互斥锁
printf("[LOW] Acquired mutex!\r\n");
// 模拟长时间占用资源
for (int i = 0; i < 5; i++) {
printf("[LOW] Working (%d/5)...\n", i + 1);
vTaskDelay(pdMS_TO_TICKS(500));
}
xSemaphoreGive(BinarySemHandle); // 释放锁
printf("[LOW] Released mutex!\n");
vTaskDelay(pdMS_TO_TICKS(2000)); // 等待下一周期
}
/* USER CODE END Low_Task */
}
//中优先级任务
void Mid_Task(void *argument) {
/* USER CODE BEGIN Mid_Task */
/* Infinite loop */
for (;;) {
printf("[MID] Running without blocking\n");
vTaskDelay(pdMS_TO_TICKS(200));
}
/* USER CODE END Mid_Task */
}
//高优先级任务
void High_Task(void *argument) {
/* USER CODE BEGIN High_Task */
/* Infinite loop */
for (;;) {
//vTaskDelay(pdMS_TO_TICKS(100)); //系统第一次运行,打开此注释则是低优先级任务先获取信号量
printf("[HIGH] Trying to take mutex...\n");
xSemaphoreTake(BinarySemHandle, portMAX_DELAY); // 阻塞在此处
printf("[HIGH] Acquired mutex!\n");
xSemaphoreGive(BinarySemHandle);
vTaskDelay(pdMS_TO_TICKS(1000));
}
/* USER CODE END High_Task */
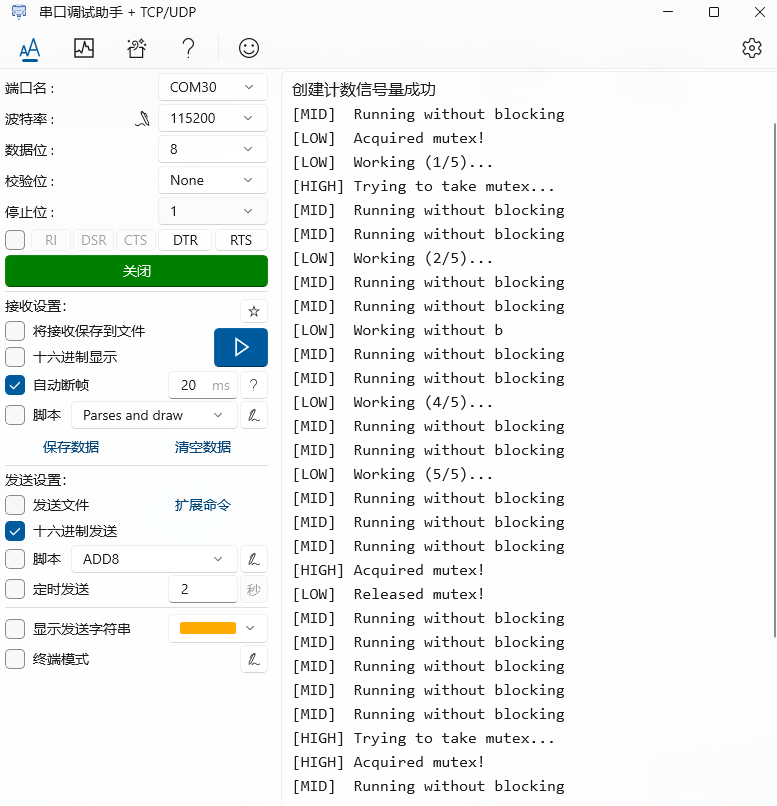
}2.3 实验结果
-
优先级顺序失效:尽管高优先级任务最先请求资源,但被中优先级任务间接阻塞
3.互斥锁/优先级天花板
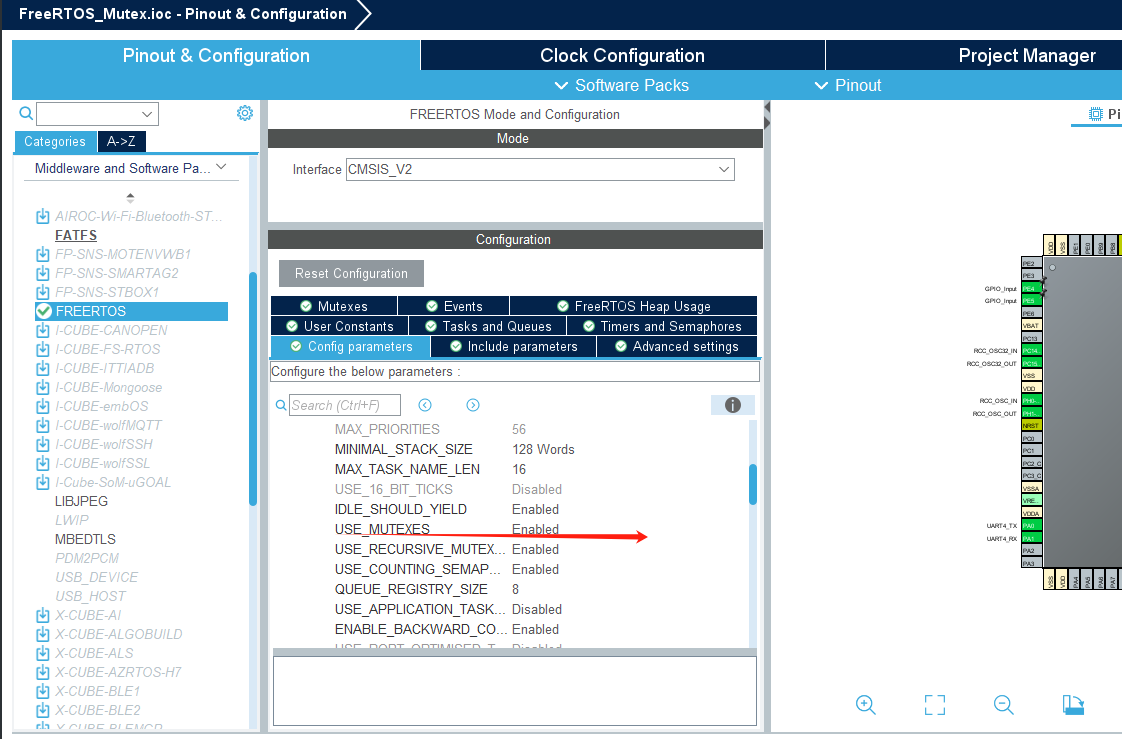
3.1 cubemx关键配置
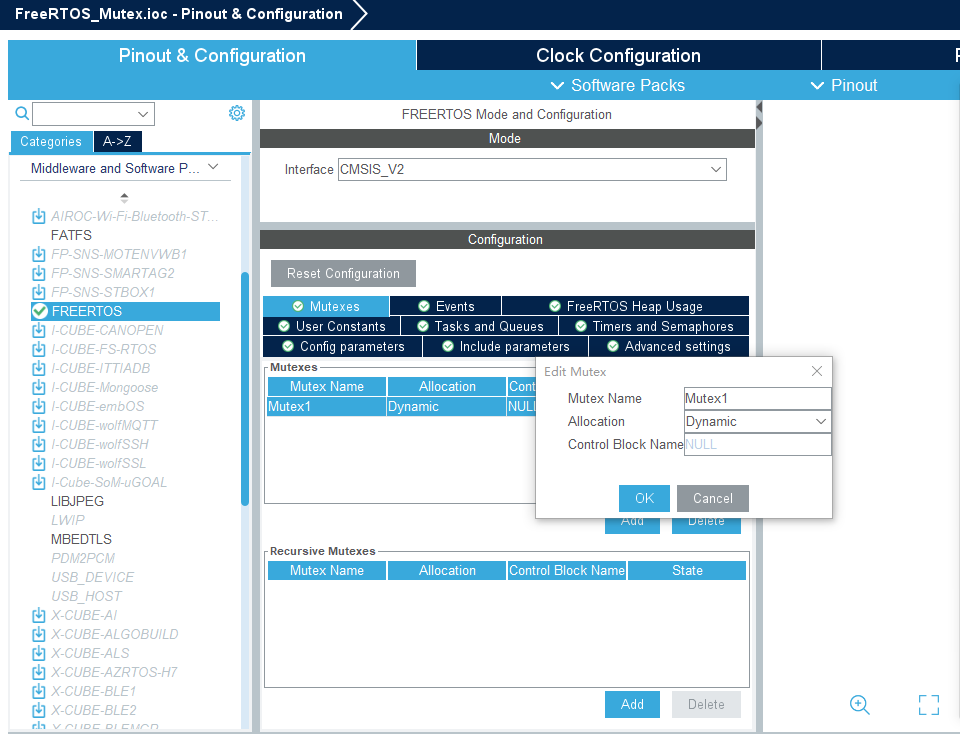
3.2 优化后代码
主要区别:1,增加互斥锁,FreeRTOS互斥锁自带优先级继承机制
2,为了使现象更加直观,vTaskDelay延时更改为HAL_Delay延时(建议不要在任务中调用HAL_Delay,否则会破坏RTOS的多任务优势)
延时机制对比
| 特性 | vTaskDelay (FreeRTOS) | HAL_Delay (裸机/HAL库) |
|---|---|---|
| 所属环境 | RTOS(任务调度生效) | 裸机(无任务调度) |
| 实现原理 | 主动让出CPU,触发任务调度 | 忙等待(CPU空转) |
| 延时精度 | 受任务调度影响(±1 tick) | 依赖SysTick,较精确 |
| CPU利用率 | 延时期间可运行其他任务 | 100%占用CPU核心 |
| 是否可被中断打断 | 是(高优先级任务或中断可抢占) | 是(但中断返回后继续延时) |
| 功耗表现 | 低(CPU可进入休眠) | 高(CPU持续运行), |
3,在低优先级任务运行时,手动提升该任务优先级为可能使用互斥资源任务中最高
//创建互斥锁
Mutex1Handle = osMutexNew(&Mutex1_attributes);
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
if (Mutex1Handle != NULL) {
printf("创建互斥锁成功\r\n");
}
//创建任务
Task1Handle = osThreadNew(Low_Task, NULL, &Task1_attributes);
Task2Handle = osThreadNew(Mid_Task, NULL, &Task2_attributes);
Task3Handle = osThreadNew(High_Task, NULL, &Task3_attributes);
//低优先级任务
void Low_Task(void *argument)
{
/* USER CODE BEGIN Low_Task */
/* Infinite loop */
for (;;) {
vTaskPrioritySet(NULL, configMAX_PRIORITIES - 1); //获取资源提升优先级天花板
xSemaphoreTake(Mutex1Handle, portMAX_DELAY); // 获取互斥锁
printf("[LOW] Acquired mutex!\r\n");
// 模拟长时间占用资源
for (int i = 0; i < 5; i++) {
printf("[LOW] Working (%d/5)...\n", i + 1);
//vTaskDelay(pdMS_TO_TICKS(500));
HAL_Delay(500);
}
xSemaphoreGive(Mutex1Handle); // 释放互斥锁
printf("[LOW] Released mutex!\n");
vTaskPrioritySet(NULL, osPriorityLow1); //恢复原始优先级
vTaskDelay(pdMS_TO_TICKS(2000)); // 等待下一周期
}
/* USER CODE END Low_Task */
}
//中优先级任务
void Mid_Task(void *argument)
{
/* USER CODE BEGIN Mid_Task */
/* Infinite loop */
for (;;) {
printf("[MID] Running without blocking\n");
vTaskDelay(pdMS_TO_TICKS(200));
}
/* USER CODE END Mid_Task */
}
//高优先级任务
void High_Task(void *argument)
{
/* USER CODE BEGIN High_Task */
/* Infinite loop */
for (;;) {
//vTaskDelay(pdMS_TO_TICKS(100)); //系统第一次运行,打开此注释则是低优先级任务先获取信号量
printf("[HIGH] Trying to take mutex...\n");
xSemaphoreTake(Mutex1Handle, portMAX_DELAY); // 阻塞在此
printf("[HIGH] Acquired mutex!\n");
xSemaphoreGive(Mutex1Handle);
vTaskDelay(pdMS_TO_TICKS(1000));
}
/* USER CODE END High_Task */
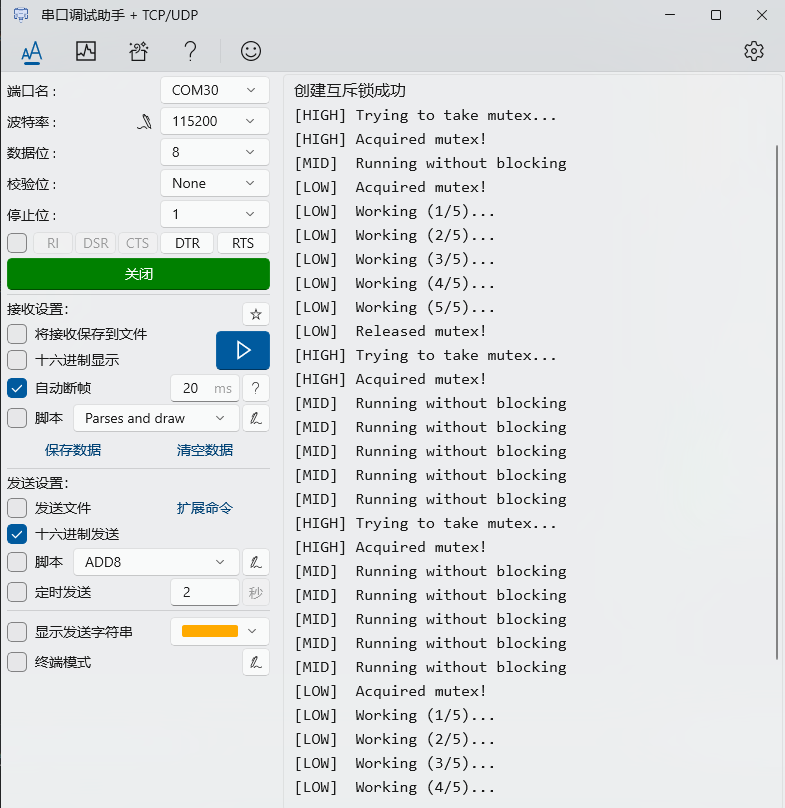
}3.3 实验结果
根据实验结果对比优化前代码可以发现,当低优先级任务持有互斥锁时,高优先级任务等待互斥锁资源时,中优先级任务并未运行,而是等待低优先级任务释放互斥锁,高优先级任务获取互斥锁运行后,中优先级任务才运行。
4. 总结
互斥锁(优先级继承)的局限性
4.1 能解决的问题
-
基本优先级反转:通过动态提升持有锁的低优先级任务的优先级,避免被中优先级任务抢占。
-
自动管理:FreeRTOS内置的优先级继承机制无需开发者手动干预。
4.2 不能完全避免的情况
-
嵌套锁:多个互斥锁嵌套使用时,可能形成复杂的优先级提升链,仍可能导致阻塞。
// 任务A(优先级3)等待锁X → 任务B(优先级2)持有X并申请Y → 任务C(优先级1)持有Y // 此时任务A仍会被间接阻塞
-
死锁风险:不当的锁获取顺序可能导致死锁(优先级继承无法解决逻辑错误)。
-
非阻塞操作:如果高优先级任务不尝试获取锁(如仅访问无保护共享数据),优先级继承不会触发。
3. 适用场景
-
简单锁场景:单个互斥锁保护资源
-
动态优先级系统:任务优先级可能运行时变化
二、手动优先级提升(天花板协议)的优势
1. 核心原理
-
预防性提升:在获取资源时,直接将持有者任务提升到预设的天花板优先级(≥所有可能访问该资源的任务的最高优先级)。
-
确定性:阻塞时间上限可严格计算。
2. 完全避免的场景
-
中优先级干扰:持有锁的任务优先级已≥所有可能竞争者,彻底消除中优先级任务的抢占可能。
-
嵌套锁死锁:通过统一的天花板优先级避免循环等待。
| 维度 | 互斥锁(优先级继承) | 手动优先级提升(天花板) |
|---|---|---|
| 实现复杂度 | 低(系统自动处理) | 高(需开发者手动管理) |
| 实时确定性 | 一般(依赖运行时行为) | 高(最坏阻塞时间可预测) |
| 嵌套锁支持 | 有限 | 优秀(统一天花板优先级) |
| CPU开销 | 较低(仅必要时提升) | 较高(每次获取锁都提升) |
| 适用系统 | 动态优先级系统 | 静态优先级系统 |
附录:常见问题
Q1:为什么我的优先级继承没有生效?
A:检查两点:
-
确认
osMutexAttr_t中设置了osMutexPrioInherit -
确保未使用
xSemaphoreCreateBinary()代替互斥锁
Q2:中断服务中如何使用?
A:优先选择xSemaphoreGiveFromISR(),禁止在ISR中阻塞
Q3:如何量化优化效果?
A:使用逻辑分析仪测量:
-
HighTask从就绪到运行的延迟
-
LowTask持有锁的总时间



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









