







 本文详细描述了如何通过XR806开发板连接JQ8900模块,使用两线串口进行硬件配置,并通过编程控制音乐播放和LED指示,实现按键控制功能。
本文详细描述了如何通过XR806开发板连接JQ8900模块,使用两线串口进行硬件配置,并通过编程控制音乐播放和LED指示,实现按键控制功能。
一、硬件连接
1.JQ8900引脚定义

通过阅读JQ8900的数据手册,可以了解到驱动JQ8900有许多种方式,IO驱动,一线串口驱动(VPP),两线串口驱动(RX,TX),这里我使用两线串口驱动。所以我需要连接到XR806开发板的一组串口上。
2.XR806开发板串口
通过查阅手册可以知道XR806有3组串口, 我选择串口1进行通信,也就是PB14,PB15引脚。

3.开发板和模块连接
我们只需要将开发板的PB15引脚接到JQ8900模块的TX引脚,开发板的PB14引脚接到JQ8900模块的RX引脚。

二、软件编写
1.程序思路
通过串口1驱动JQ8900模块播放音乐,通过XR806的按键去控制音乐的切换(播放,暂停,上一曲,下一曲,停止等),每按下一次按键,XR806板载LED就会进行一次取反操作,用来显示按键按下效果。
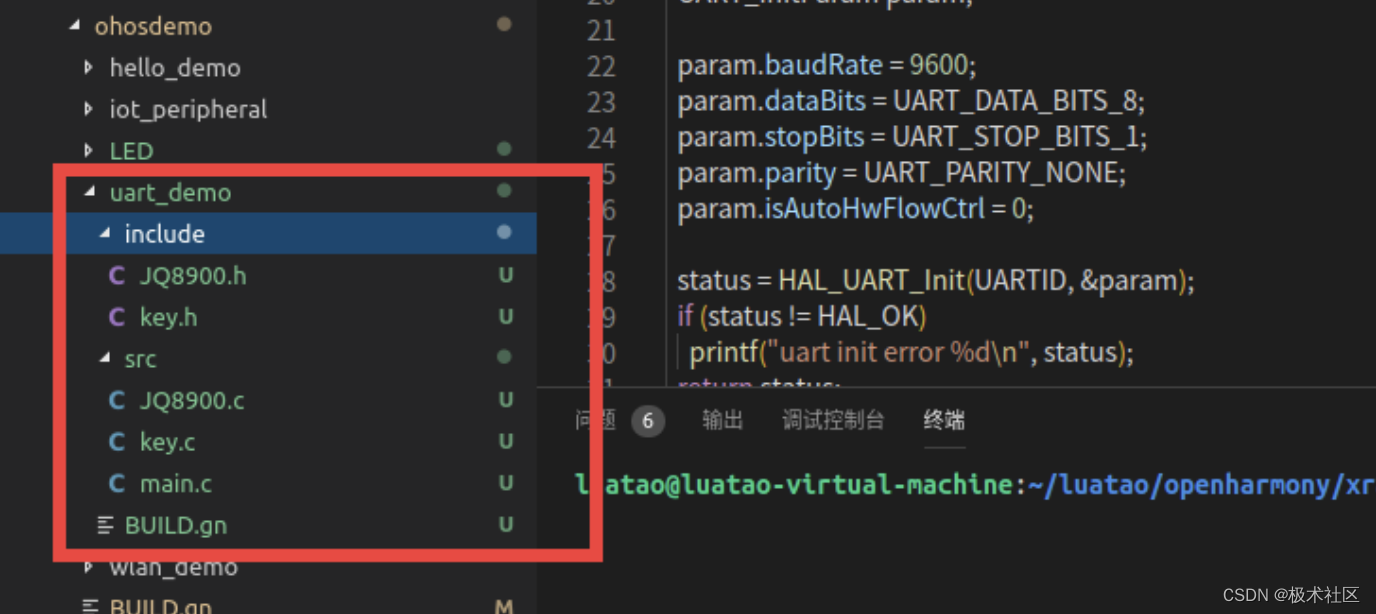
2.创建工程结构
目录结构如下面红框所示。
3.编写代码
1.key.h
#ifndef _KEY_H
#define _KEY_H
#define GPIO_ID_PA11 11
#define GPIO_ID_PA21 21
extern uint8_t key_status ;
extern uint8_t key_value;
void key_init(void);
void key_scan(void);
#endif
2.key.c
#include <stdio.h>
#include "ohos_init.h" //
#include "kernel/os/os.h"
#include "iot_gpio.h" //
#include "key.h"
uint8_t key_status = 1;
uint8_t key_value = 0;
void key_init(void)
{
printf("key test start\r\n");
IoTGpioInit(GPIO_ID_PA11); // 初始化IO口,io口复位为悬空输入
IoTGpioSetDir(GPIO_ID_PA11, IOT_GPIO_DIR_IN);
IoTGpioInit(GPIO_ID_PA21); // 初始化IO口,io口复位为悬空输入
IoTGpioSetDir(GPIO_ID_PA21, IOT_GPIO_DIR_OUT); // 设置IO口为输出模式
}
void key_scan(void)
{
uint8_t keyVal = 1;
uint8_t ledVal = 0;
IoTGpioGetInputVal(GPIO_ID_PA11,&keyVal);
// printf("keyVal:%d\r\n",keyVal);
if(keyVal == 0){
OS_MSleep(10);
IoTGpioGetInputVal(GPIO_ID_PA11,&keyVal);
if(keyVal == 0){
key_status = 1;
key_value ++;
if(key_status == 5)
key_value = 1;
// 按键执行操作
IoTGpioGetOutputVal(GPIO_ID_PA21,&ledVal);
// printf("ledVal:%d\r\n",ledVal);
if(ledVal == 1){
IoTGpioSetOutputVal(GPIO_ID_PA21, 0);
// printf(" set 0\r\n");
}
else{
IoTGpioSetOutputVal(GPIO_ID_PA21, 1);
// printf(" set 1\r\n");
}
// IoTGpioGetOutputVal(GPIO_ID_PA21,ledVal);
// printf("ledVal set after:%d\r\n",ledVal);
while(keyVal == 0){
IoTGpioGetInputVal(GPIO_ID_PA11,&keyVal);
}
}
}
}
3.JQ8900.h
#ifndef _JQ8900_H
#define _JQ8900_H
extern const uint8_t play_Buffer[4];
extern const uint8_t pause_Buffer[4];
extern const uint8_t stop_Buffer[4];
extern const uint8_t previous_Buffer[4];
extern const uint8_t next_Buffer[4];
#endif
4.JQ8900.c
#include <stdio.h>
#include "ohos_init.h" //
#include "kernel/os/os.h"
#include <string.h>
#include "driver/chip/hal_uart.h"
#include "JQ8900.h"
#define UARTID UART1_ID
/* 音量为0-30级 上电默认为20 */
uint8_t JQ8900Volume = 20;
const uint8_t play_Buffer[4] = {0xAA,0x02,0x00,0xAC};
const uint8_t pause_Buffer[4] = {0xAA,0x03,0x00,0xAD};
const uint8_t stop_Buffer[4] = {0xAA,0x04,0x00,0xAE};
const uint8_t previous_Buffer[4] = {0xAA,0x05,0x00,0xAF};
const uint8_t next_Buffer[4] = {0xAA,0x06,0x00,0xB0};
/* 其他命令请查看数据手册*/
/* 串口发送一个字节 */
void JQ8900_SendChar(char val)
{
HAL_UART_Transmit_Poll(UARTID, (uint8_t *)val, 1);
}
5.main.c
#include <stdio.h>
#include "ohos_init.h" //
#include "kernel/os/os.h"
#include "iot_gpio.h" //
#include <string.h>
#include "driver/chip/hal_uart.h"
#include "key.h"
#include "JQ8900.h"
#define UARTID UART1_ID
static OS_Thread_t g_main_thread;
static int uart_init(void)
{
HAL_Status status = HAL_ERROR;
UART_InitParam param;
param.baudRate = 9600; // 波特率为9600
param.dataBits = UART_DATA_BITS_8;
param.stopBits = UART_STOP_BITS_1;
param.parity = UART_PARITY_NONE;
param.isAutoHwFlowCtrl = 0;
status = HAL_UART_Init(UARTID, ¶m);
if (status != HAL_OK)
printf("uart init error %d\n", status);
return status;
}
static void MainThread(void *arg)
{
key_init();
uart_init();
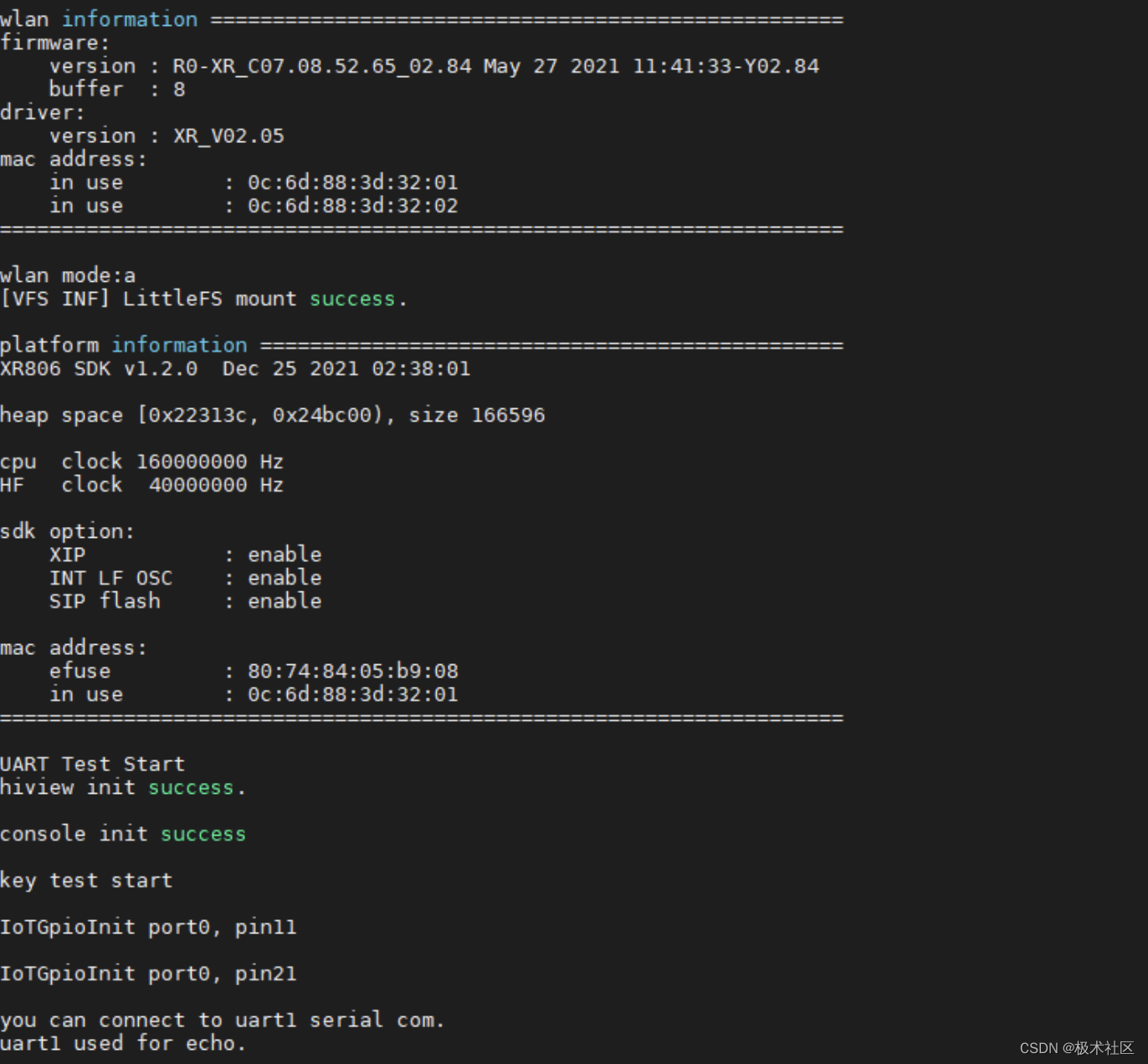
printf("you can connect to uart1 serial com.\n");
printf("uart%d used for echo.\n", UARTID);
while (1) {
key_scan();
if(key_status == 1){ // 按键按下,可以进行操作
key_status = 0;
switch(key_value)
{
case 0:
HAL_UART_Transmit_Poll(UARTID, (uint8_t *)play_Buffer, 4);
break;
case 1:
HAL_UART_Transmit_Poll(UARTID, (uint8_t *)pause_Buffer, 4);
break;
case 2:
HAL_UART_Transmit_Poll(UARTID, (uint8_t *)play_Buffer, 4);
break;
case 3:
HAL_UART_Transmit_Poll(UARTID, (uint8_t *)previous_Buffer, 4);
break;
case 4:
HAL_UART_Transmit_Poll(UARTID, (uint8_t *)next_Buffer, 4);
break;
}
}
}
}
void UARTMain(void)
{
printf("UART Test Start\n");
if (OS_ThreadCreate(&g_main_thread, "MainThread", MainThread, NULL,
OS_THREAD_PRIO_APP, 4 * 1024) != OS_OK) {
printf("[ERR] Create MainThread Failed\n");
}
}
SYS_RUN(UARTMain); // Harmony线程入口
6.BUILD.gn
import("//device/xradio/xr806/liteos_m/config.gni")
static_library("app_uart") {
configs = []
sources = [
"src/main.c",
"src/JQ8900.c",
"src/key.c",
]
cflags = board_cflags
include_dirs = board_include_dirs
include_dirs += [
"//kernel/liteos_m/kernel/arch/include",
"include",
"//base/iot_hardware/peripheral/interfaces/kits",
]
}
7.修改ohosdemo/BUILD.gn

三、编译,下载。
下载过程我就不写了,可以去看上一篇文章。
四、效果
1.终端输出















 1046
1046











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









