







moveL指令的Until用法
简介
简单来说,就是一些moveL指令里面可以配置判断指令,比如说机械臂从A点移动到B点,在这个移动过程中,如果某个条件成立,机械臂就跳出从A点移动到B点的这个过程,执行下面的程序。下面我们通过不增加这个参数和增加这个参数做一个对比。
另外需要注意的是,不同产品的机械臂该功能实现方式不同
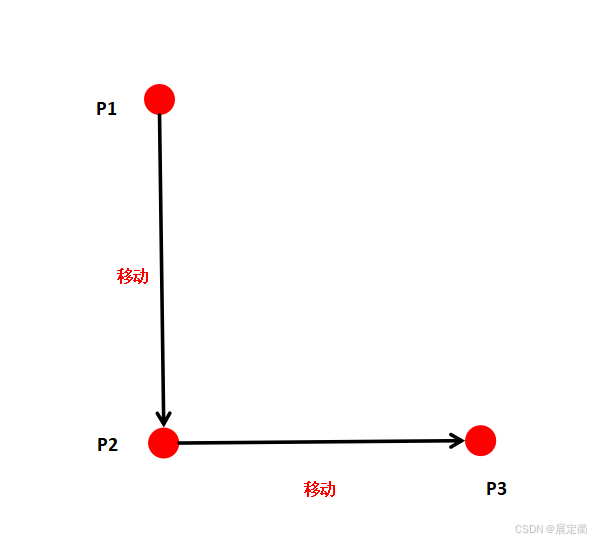
1. 移动指令中不增加until参数
假设我们机械臂从P1点运行到P2点,再运行到P3点,不加until参数运行轨迹如下;
NOP
//首先直线运行至P1点
MOVL P001 V=500.0MM/S CR=0.0MM ACC=50 DEC=50
//再直线运行至P2点
MOVL P002 V=500.0MM/S CR=0.0MM ACC=50 DEC=50
//再直线运行至P3点
MOVL P003 V=500.0MM/S CR=0.0MM ACC=50 DEC=50
END
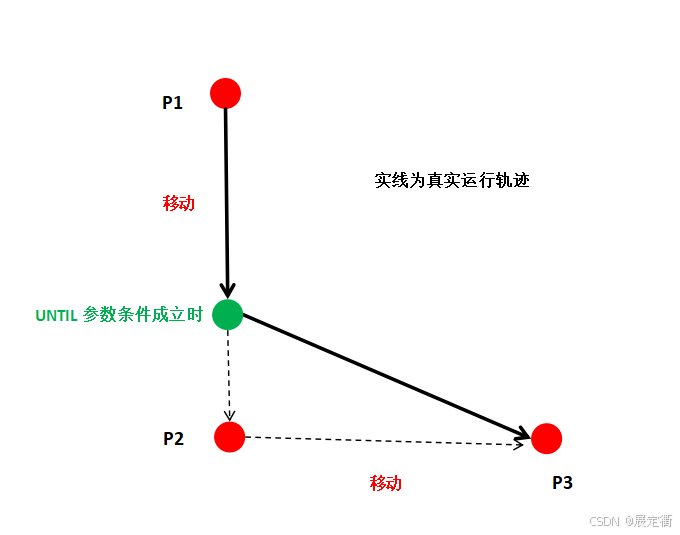
2. 移动指令中增加until参数
机械臂从P1点运行到P2点,再运行到P3点,加until参数运行轨迹如下;
NOP
//首先直线运行至P1点
MOVL P001 V=500.0MM/S CR=0.0MM ACC=50 DEC=50
//再直线运行至P2点,但是运行P2点的时候会有一个UNTIL条件,当条件成立的时候(虚拟信号M528=1),退出该行移动指令,执行下一步
MOVL P002 V=500.0MM/S CR=0.0MM ACC=50 DEC=50 UNTIL M#(528)=1
//再直线运行至P3点
MOVL P003 V=500.0MM/S CR=0.0MM ACC=50 DEC=50
END
3. 应用场景
3.1 物料抓取
比如机械臂抓取一些高度不统一的物料的作业中,就可以给夹爪末端安装一个压力传感器或者激光传感器等,当机械臂往下运行,抓取物料的过程中,夹爪上的感应器碰到物料后,触发信号,机械臂收到信号,退出当前指令,执行下一步抓取动作等场景。
3.2 抛光打磨
在一些抛光打磨的过程中,机械臂末端带抛光工具,抛光工具头可以感受压力,当机械臂移动的过程中,工具头会碰到物料,压力传感器给机械臂信号,收到信号后,机械臂就进行抛光作业。
·
·
·
·
·
该功能多应用于一些不规则作业场景中,需要配合传感器使用



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











