






解决在win机器22,445端口无法访问的前提下:
连接多个win机器磁盘映射或者访问共享文件夹问题
方法一: 直接套用如下脚本
导入os和subprocess模块。
1.使用subprocess.run执行net use命令查看该映射是否存在。
2.如果存在,则使用subprocess.run执行net use /delete命令断开该映射。
3.如果不存在,则执行net use命令映射该磁盘。
4.如果需要用户名密码,则要求用户输入,然后使用subprocess.run执行net use命令映射该磁盘。
import os
import subprocess
# 定义待检查的磁盘映射列表
drive_mappings = [
{"drive": "X:", "path": "\\\\127.0..0.1\\shared", "user": "", "password": ""},
{"drive": "Y:", "path": "\\\\127.0..0.2\\shared", "user": "username", "password": None},
{"drive": "Z:", "path": "\\\\127.0..0.3\\shared", "user": "", "password": ""}
]
# 遍历映射列表,对每个映射进行检查和断开操作
for mapping in drive_mappings:
# 执行net use命令查看该映射是否存在
result = subprocess.run(["net", "use", mapping["drive"]], capture_output=True)
# 如果存在,则执行net use /delete命令断开该映射, 如果gbk打印结果有问题,建议用cp850
if "OK" in result.stdout.decode("gbk"):
os.system(f"net use {mapping['drive']} /delete /yes")
print(f"断开映射 {mapping['drive']}")
# 如果不存在,则执行net use命令映射该磁盘
else:
# 判断是否需要输入用户名密码
if mapping["user"]:
password = input(f"请输入 {mapping['drive']} 的密码:")
if password:
mapping["password"] = password
else:
print("密码不能为空!")
continue
# 执行net use命令映射磁盘
if mapping["password"] is not None:
print(f"映射 {mapping['drive']}")
os.system(f"net use {mapping['drive']} {mapping['path']} /user:{mapping['user']} {mapping['password']}")
else:
print(f"映射 {mapping['drive']}")
os.system(f"net use {mapping['drive']} {mapping['path']}")
在这个示例中,每个映射都被表示成一个包含映射驱动器,网络共享路径,用户名和密码的字典。在遍历映射列表时,我们首先使用subprocess.run执行net use命令来检查是否存在映射。如果映射存在,我们使用os.system执行net use /delete命令来断开该映射。如果映射不存在,我们首先检查映射是否需要用户名和密码。如果需要,我们提示用户输入密码,然后再使用os.system执行net use命令来映射磁盘。如果不需要密码,则直接使用os.system映射磁盘。
**
方法二: 调用封装函数
**
将脚本实现封装后,只需要在MapDisk.yaml文件中写用例即可,此后执行Map_disk.py脚本即可实现win磁盘的一些映射操作
目录介绍:
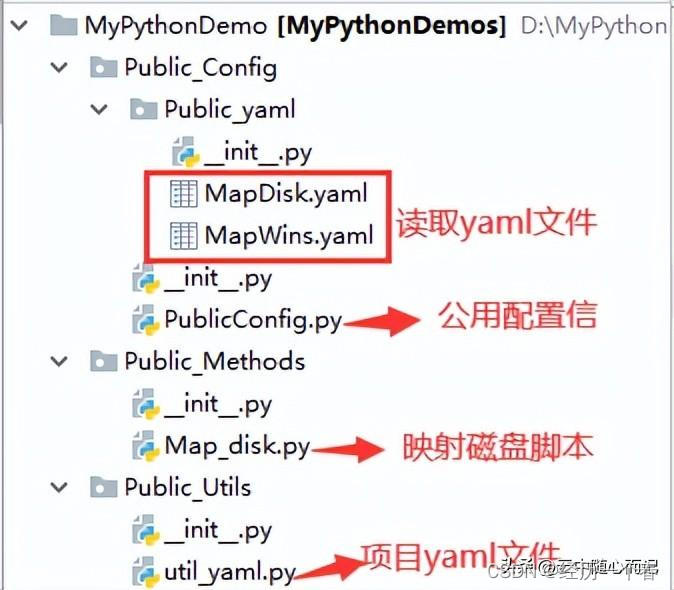
脚本附上:
yaml填写需要映射的磁盘 和 共享路径即可 用户名密码有则填写,无则忽略
MapDisk.yaml 填写用例
MapDisk:
-
dirver_disk: "W:"
map_path: \\127.0.0.1\d$
user:
password:
-
dirver_disk: "E:"
map_path: \\127.0.0.2\d$
user: uatadmin
password: Uat@yybp5.11215
PublicConfig.py脚本: 配置读取信息,方便调用
import os
from Public_Utils.util_yaml import YamlReader
class YamlPath:
def __init__(self):
current = os.path.abspath(__file__)
self.base_dir = os.path.dirname(os.path.dirname(current))
def get_disk_yaml_file(self):
_config_path = self.base_dir + os.sep + "Public_Config\Public_yaml"
self._config_file = _config_path + os.sep + "MapDisk.yaml"
return self._config_file
def get_win_yaml_file(self):
_config_path = self.base_dir + os.sep + "Public_Config\Public_yaml"
self._config_file = _config_path + os.sep + "Mapwins.yaml"
return self._config_file
class ConfigYaml:
def __init__(self): #初始yaml读取配置文件
self.disk_config = YamlReader(YamlPath().get_disk_yaml_file()).yaml_data()
self.win_config = YamlReader(YamlPath().get_win_yaml_file()).yaml_data()
def get_dirver_disk(self):
return self.disk_config['MapDisk']
def get_win_yaml(self):
return self.win_config
if __name__ == '__main__':
#print(ConfigYaml().get_win_yaml())
pass
Map_disk.py 用例执行脚本
class MAPPing:
#定义检查映射磁盘的列表
# ConfigYaml().get_dirver_disk()
def Maps_disk(self):
#遍历映射列表,对每个映射进行检查和断开操作
for map_didk in ConfigYaml().get_dirver_disk():
if map_didk['dirver_disk'] in subprocess.check_output("net use",shell=True).decode("cp850"): #执行net use命令查看映射是否存在 -cp850
os.system('net use %s /del /y' % map_didk['dirver_disk']) # 删除映射盘
if map_didk["user"] == None or map_didk["password"] ==None:
os.system(f'net use {map_didk["dirver_disk"]} {map_didk["map_path"]}')
print(f'成功映射驱动器{map_didk["dirver_disk"]} {map_didk["map_path"]}')
else:
os.system(f'net use {map_didk["dirver_disk"]} {map_didk["map_path"]} /user:{map_didk["user"]} {map_didk["password"]}')
print(f'成功映射驱动器{map_didk["dirver_disk"]} {map_didk["map_path"]}')
if __name__ == '__main__':
pass
util_yaml.py
class YamlReader:
#初始化,判断文件是否存在
def __init__(self,yaml_file):
if os.path.exists(yaml_file):
self.yaml_file = yaml_file
else:
raise FileNotFoundError("yaml文件不存在")
self._data = None
self._data_all = None
def yaml_data(self): #yaml文件读取 --单个文档读取
#第一次调用data,读取yaml文档,如果不是,直接返回之前保存的数据
if not self._data:
with open(self.yaml_file,'rb') as f:
self._data = yaml.safe_load(f)
return self._data
def yaml_data_all(self): #多个文档的读取
if not self._data_all:
with open(self.yaml_file,'rb') as f:
self._data_all = yaml.safe_load_all(f)
return self._data_all















 1889
1889











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











