









背景问题
有时候,我们会使用深度神经网络来学习数据。如果效果不理想,常常都会 加深和加宽全连接层 来让效果更加的完善。但是加深加宽网络会引来更加多的问题,比如 梯度消失/梯度爆炸 等。
特别是面对图像识别问题的时候,比如手写数字识别,一幅图片本来就有大量的信息,width/height/3 color channels 等,加深加宽网络下的模型,结果往往未如理想。
CNN 就是为了解决上述的问题的。CNN 即是 Convolution Neural Network,卷积神经网络。
先讲解不同的子组件,再组合起来,形成手写的模型,这样就更加容易的去理解模型。
卷积和卷积核
卷积
卷积,是 来源矩阵 和 卷积核矩阵 一个个对应位置进行相乘后,再相加的运算。
# 对 【中心点】进行卷积运算
# 来源举证
input_array = np.array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
# 卷积核
kernel_array = np.array([[1, 0, 0],
[0, 1, 0],
[0, 0, 1]])
# 卷积操作
# 1*1+2*0+3*0+4*0+5*1+6*0+7*0+8*0+9*1 = 15
# 对应卷积后
Output:
[[15]]
如果加上 padding 和 stride 的话,即卷积核就可以沿着 来源矩阵 滑动,完成整个卷积操作。
# padding = 1 ,stride = 1
# 来源矩阵
input_array = np.array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
# 卷积核
kernel_array = np.array([[1, 0, 0],
[0, 1, 0],
[0, 0, 1]])
# 对应卷积后
Output:
[[ 6 8 3]
[12 15 8]
[ 7 12 14]]
卷积核 kernel's size,padding , stride 与 输入矩阵 input 和输出矩阵 output 大小的对应关系:
如果是 3*3 的卷积核,padding=1 stride=1,输入和输出的矩阵大小一致。
卷积核
上例中,卷积核,就是 kernel_array,[[1, 0, 0],[0, 1, 0],[0, 0, 1]],他是 3X3 的卷积核。
从 网站 知道,不同的卷积核应用到相同的图片上,可以得到不同的结果。比如有一些是可以提取边缘特征,有些是可以模糊的。
💊 卷积核,就是提取特征的矩阵。有多少个卷积核,就是代表提取多少个特征。不同的卷积核可以提取不同的特征。
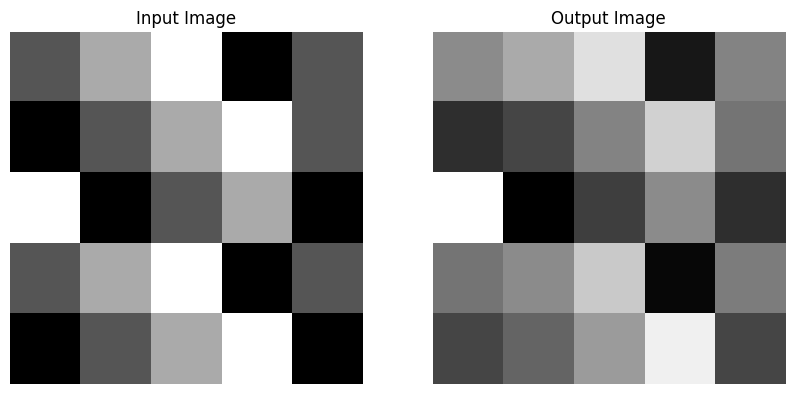
下面的代码,就是使用预设的卷积核(提取边缘轮廓特征的卷积核)去获取特征,我们可以看到直接输出的结果。
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
import numpy as np
# Create a sample input image (1, 1, 5, 5)
input_image = torch.tensor([[[[1, 2, 3, 0, 1],
[0, 1, 2, 3, 1],
[3, 0, 1, 2, 0],
[1, 2, 3, 0, 1],
[0, 1, 2, 3, 0]]]], dtype=torch.float32)
# Define a convolutional layer
conv_layer = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3, stride=1, padding=1)
# Initialize the kernel weights for demonstration purposes (e.g., edge detection kernel)
edge_detection_kernel = torch.tensor([[[[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]]]], dtype=torch.float32)
conv_layer.weight = torch.nn.Parameter(edge_detection_kernel)
conv_layer.bias = torch.nn.Parameter(torch.zeros(1))
# Apply the convolutional layer to the input image
output_image = conv_layer(input_image)
# Convert the output to a NumPy array for visualization
output_image_np = output_image.detach().numpy().squeeze()
# Visualize the input and output images
def visualize_images(input_img, output_img):
fig, axes = plt.subplots(1, 2, figsize=(10, 5))
axes[0].imshow(input_img.squeeze(), cmap='gray')
axes[0].set_title('Input Image')
axes[0].axis('off')
axes[1].imshow(output_img, cmap='gray')
axes[1].set_title('Output Image')
axes[1].axis('off')
plt.show()
# Display the images
visualize_images(input_image, output_image_np)
# Print the input and output values for comparison
print("Input Image:\n", input_image.squeeze().numpy())
print("\nOutput Image:\n", output_image_np)
Input Image:
[[1. 2. 3. 0. 1.]
[0. 1. 2. 3. 1.]
[3. 0. 1. 2. 0.]
[1. 2. 3. 0. 1.]
[0. 1. 2. 3. 0.]]
Output Image:
[[ 5. 9. 16. -10. 4.]
[ -7. -4. 4. 14. 2.]
[ 20. -13. -5. 5. -7.]
[ 2. 5. 13. -12. 3.]
[ -4. 0. 7. 18. -4.]]
从结果知道(从灰度图看不出问题,但是从数字矩阵可以看出),这个卷积核令到 黑的更加的黑, 白的更加的白,突出了特征。
卷积的好处
- 共享参数
卷积核,就是滑过数据的共享参数,那么他能够提取对应的特征数据。所以一个卷积核对应着一个特征。需要提取的特征,不论是在图片的哪个位置,都可以提取出来。
- 参数减少
比如 100 * 100 的图像,要去识别苹果,但是这个苹果有可能出现在上下左右,随机的位置。
如果使用 NN 神经网络 就要使用 (100 * 100, n, n) 网络, 网络的输入是每个坐标像素。但是苹果的出现的位置是随机的,即坐标是随机的,所以对应的神经元也是需要学习,导致非常难收敛。同时,参数量就是巨大的,达到 10000 * n * n。
但是使用 CNN,可以针对 苹果轮廓 训练 对应卷积核,达到识别的效果,就大大减少参数量。参数量就是 卷积核上的数值 和 后续的高维度的全链接网络的参数。
- 位置信息的共享
如果上例子中,苹果轮廓信息是共享的。
池化
有平均池化和最大值池化,他 没有参数学习,完全是按照默认的逻辑去运行的。
- 平均池化,取平均值,会模糊特征,他可以考虑到所有像素的关系;
- 最大值池化,取最大值,就突出了特征了,完全是忽视了最小值。
Input_array:
[[ 1. 2. 3. 4.]
[ 5. 6. 7. 8.]
[ 9. 10. 11. 12.]
[13. 14. 15. 16.]]
应用 kernel_size=2, stride=2 的 池化
Average Pooled Image:
[[ 3.5 5.5]
[11.5 13.5]]
Max Pooled Image:
[[ 6. 8.]
[14. 16.]]
从结果知道,如果池化后,计算量是加上了 3/4,同时可以保留原来图像的特征。
池化好处
就是为了减少运算量,而且没有参数,不用学习。换一句话,有很多的数据是没有意义的,计算他们投入产出比太低,不如直接放弃。
手写简单 CNN 网络
组装 卷积 和 _池化 _的一个网络,就是一个简单的 CNN 网络,比如 以下的代码就是一个简单的 卷积和池化操作相结合。
# 部分代码的演示
# conv 定义卷积
conv = .Conv2d(1, 32, kernel_size=3, padding=1
# pool 定义池化
pool = nn.MaxPool2d(kernel_size=2, stride=2)
# 结合激活函数
x = pool(relu(conv(x)))
所有模型(包括
NN,CNN,AlexNet,ResNet,RNN等 ),都是一个个的子组件的组装,就好像积木一样。所以理解好不同的 子组件的原理和用法,就更加容易理解由他们组装而成的大模型。
完整代码检测手写数字的图片
导入手写数字的图片库,同时使用一个 简单的 CNN 来训练
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
import torch.nn.functional as F
# Define the CNN model
class SimpleCNN(nn.Module):
def __init__(self):
super(SimpleCNN, self).__init__()
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, padding=1)
self.pool = nn.MaxPool2d(kernel_size=2, stride=2)
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
self.fc1 = nn.Linear(64 * 7 * 7, 64)
self.fc2 = nn.Linear(64, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 64 * 7 * 7)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
# Load and preprocess the MNIST dataset
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,))
])
trainset = torchvision.datasets.MNIST(root='../data/mnist', train=True, download=True, transform=transform)
trainloader = DataLoader(trainset, batch_size=64, shuffle=True)
testset = torchvision.datasets.MNIST(root='../data/mnist', train=False, download=True, transform=transform)
testloader = DataLoader(testset, batch_size=64, shuffle=False)
# Instantiate the model, define the loss function and the optimizer
model = SimpleCNN()
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
# Training loop
num_epochs = 5
for epoch in range(num_epochs):
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
inputs, labels = data
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
if i % 100 == 99:
print(f'[Epoch {epoch + 1}, Batch {i + 1}] loss: {running_loss / 100:.3f}')
running_loss = 0.0
print('Finished Training')
# Test the model
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print(f'Accuracy of the network on the 10000 test images: {100 * correct / total:.2f}%')
'''
# 部分打印
[Epoch 5, Batch 600] loss: 0.075
[Epoch 5, Batch 700] loss: 0.093
[Epoch 5, Batch 800] loss: 0.074
[Epoch 5, Batch 900] loss: 0.081
Finished Training
Accuracy of the network on the 10000 test images: 98.08%
'''
模型训练的结果是另人满意的。
说明
上面的例子,已经说明了 CNN 的整体的框架。
结构图
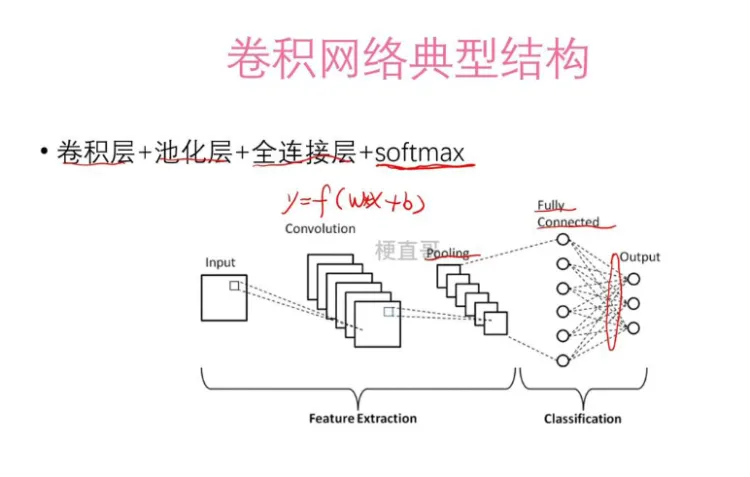
面对 分类任务,主体上分成两层: Feature Extraction 特征提取 和 Classification 分类
Feature Extraction: input 就是输入的数据,Convolution 就是卷积,Pooling 就是池化,到这步为止,就是从低维度特征的提取。
Classification:之后对提取后的特征进行 高维全网络学习 和 softmax 进行分类。
一句话原理
- 全数据先用卷积提取特征,再使用 池化层 进行数据量的简化,同时保留特征
- 特征再用全链接学习规律
总结成一句话就是,每个组件都在自己擅长东西。
❓卷积核的 out_channel 是否重要?
nn.Conv2d(32, 64, kernel_size=3, padding=1)中的64就是out_channel
重要,他是决定了多少个卷积核,即多少个 features 可以给提取。
题外话,卷积核的 size,是决定了他可以识别的范围(接收野 receptive field),比如 小的卷积核,就可以识别精细的特征;大的,可以识别轮廓的特征。
❓卷积核的参数是学习而来,还是预设定的呢?
可以预设,也可以学习而来的。
但是在 CNN 中,尽量不用指定卷积核,让他去进行训练习得。
简要总结
卷积
- 共享参数
- 参数减少
- 可以有位置信息的共享
卷积核
- out_channel 决定了提取多少个特征
- kernel_size 决定你有多少的视野
池化,就是为了简化数量的同时,又可以保留特征;全链接层,对抽取的特征进行学习。
_CNN _就是组合上述组件,形成一个大的网络。
优缺点和场景
- 有空间位置信息,就可以使用卷积神经网络
- 特别图像识别















 1814
1814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









