






Qt与下位机通讯可以使用提供的串口通信的类QtSerialPort(串行端口类),QSerialPortInfo(串行端口信息类);


串口通讯的操作流程为:
1、设置串口端口号;(设置前需要检查系统内可用的com口)
2、设置波特率,如9600,n,8,1;
3、打开串口;
4、读写串口通讯数据;
5、关闭串口;
下面,以串口助手为例,解释串口通讯设置使用方法;
首先需要包含两个头文件:

.pro文件中增加如下行;

.h中增加槽函数声明,增加串口初始化函数声明,QSerialPort类的端口函数声明;


下面来到主函数.cpp;首先构造函数中,需要进行系统初始化,也就是设置前文n,8,1;

后面是对其他按钮进行槽函数的链接;
然后查看可以的端口,并且使用for循环输出到界面列表控件的选项里;


关闭端口,打开端口函数;




通过write函数,进行串口数据的发送;下图提供了数据和文本两种发送的方式;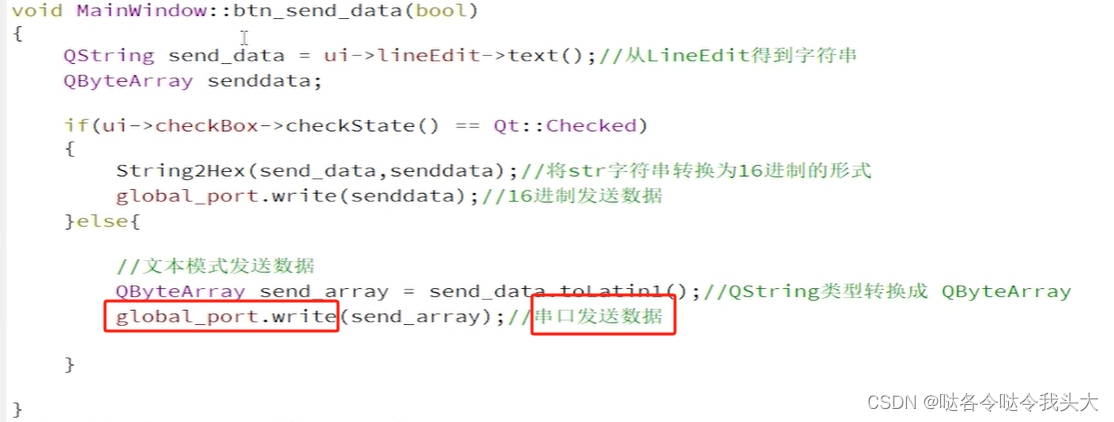 而接受数据,通过readAll函数进行;如下例子添加了文本还是数据显示方式的判断,将读到的数据通过insertPlainText插入到plainTextEdit中;
而接受数据,通过readAll函数进行;如下例子添加了文本还是数据显示方式的判断,将读到的数据通过insertPlainText插入到plainTextEdit中;
 感谢up:
感谢up:













 4426
4426











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









