







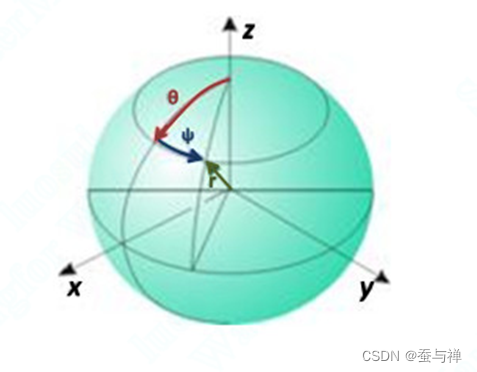
在航空航天目标模拟,或者3D游戏中,某物体运动的轨迹往往存在一定误差,究其根本是探测设备(比如雷达和望远镜)只能无限逼近真实值,而永远不能测量到绝对的真实值。一维和二维的随机误差生成比较容易,三维随机误差的生成可以利用极坐标生成在一个球体内均匀分布的三维点,再转换为三维直角坐标。示例中,以原点为中心,随机生成50个三维点,误差控制在100以内,根据需要也可以将其封装为一个函数,下面给出C++代码:
#include <iostream>
#include <cstdlib>
#include <cmath>
#define PI 3.14159265358979323846
int main() {
double x0 = 0.0, y0 = 0.0, z0 = 0.0; // 球心坐标
srand(time(NULL)); // 设置随机数种子
double err = 100;
for (int i = 0; i < 50; i++)
{
double r = static_cast<double>(rand()) / RAND_MAX * err; // 球体半径
double u = static_cast<double>(rand()) / RAND_MAX; // 生成随机数,范围[0, 1]
double v = static_cast<double>(rand()) / RAND_MAX; // 生成随机数,范围[0, 1]
double theta = 2 * PI * u; // 俯仰角,范围[0, 2π]
double phi = acos(2 * v - 1); // 方位角,范围[0, π]
double x = x0 + r * sin(phi) * cos(theta);
double y = y0 + r * sin(phi) * sin(theta);
double z = z0 + r * cos(phi);
std::cout << "随机点坐标:" << x << ", " << y << ", " << z << std::endl;
double dist = sqrt((x - x0) * (x - x0) + (y - y0) * (y - y0) + (z - z0) * (z - z0));
std::cout << "误差:" << dist << std::endl;
}
return 0;
}
运行结果:
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









