





Monitoring Railway Bridge KW51 Before, During, and After Retrofitting
数据:https://zenodo.org/records/3745914
论文:Monitoring Railway Bridge KW51 Before, During, and After Retrofitting
摘要
本文介绍了对比利时鲁汶的一座钢弓弦铁路桥进行 15 个月监测后获得的一组数据。在此期间,在**观察到损坏后**,对桥面和拱门的斜线连接进行了加固。监测包括测量桥面和拱桥的加速度、桥面和连接桥面与拱桥的斜线的应变、钢轨的应变、支座的位移以及温度和相对湿度。提供了每天两次 列车通过和六次 环境振动的数据。此外,还添加了已识别模态特征随时间的演变。该数据集非常适合验证基于振动的结构健康监测方法,因为它包含了结构不同状态的数据,即改造前、改造期间和改造后的数据。introduction
本研究的对象是比利时鲁汶的一座钢结构铁路桥,称为 KW51 铁路桥(图 1,坐标:北纬 50.9004,东经 4.7066)。该桥为弓弦桥,长115米,宽12.4米,位于鲁汶和布鲁塞尔之间的 L36N 铁路线上,横跨鲁汶-梅赫伦运河。最近的火车站是鲁汶站(2.2 公里处)和赫伦特站(2.3 公里处)。铁路桥由两条有砟电气化轨道组成,分别称为 ** A 轨道**(位于北侧)和 ** B 轨道**(位于南侧)。最高时速为 160 公里。两条轨道均为曲线(** tracks are curved**),A 轨道的曲线半径为 1125 米,B 轨道的曲线半径为 1121 米。该桥供旅客列车使用,于 2003 年通车。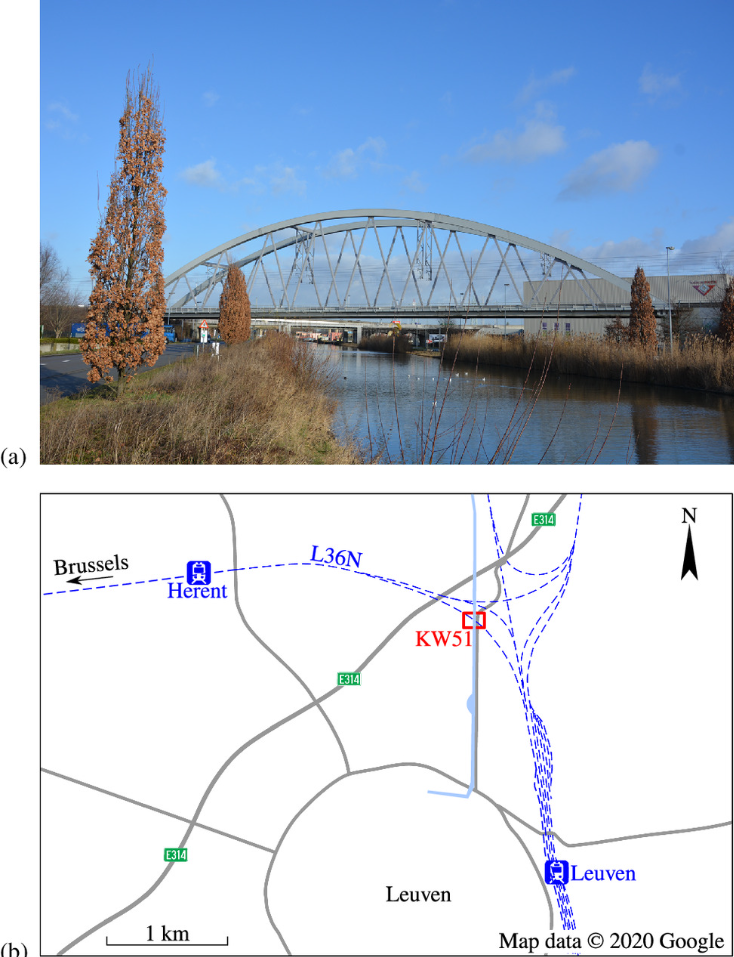
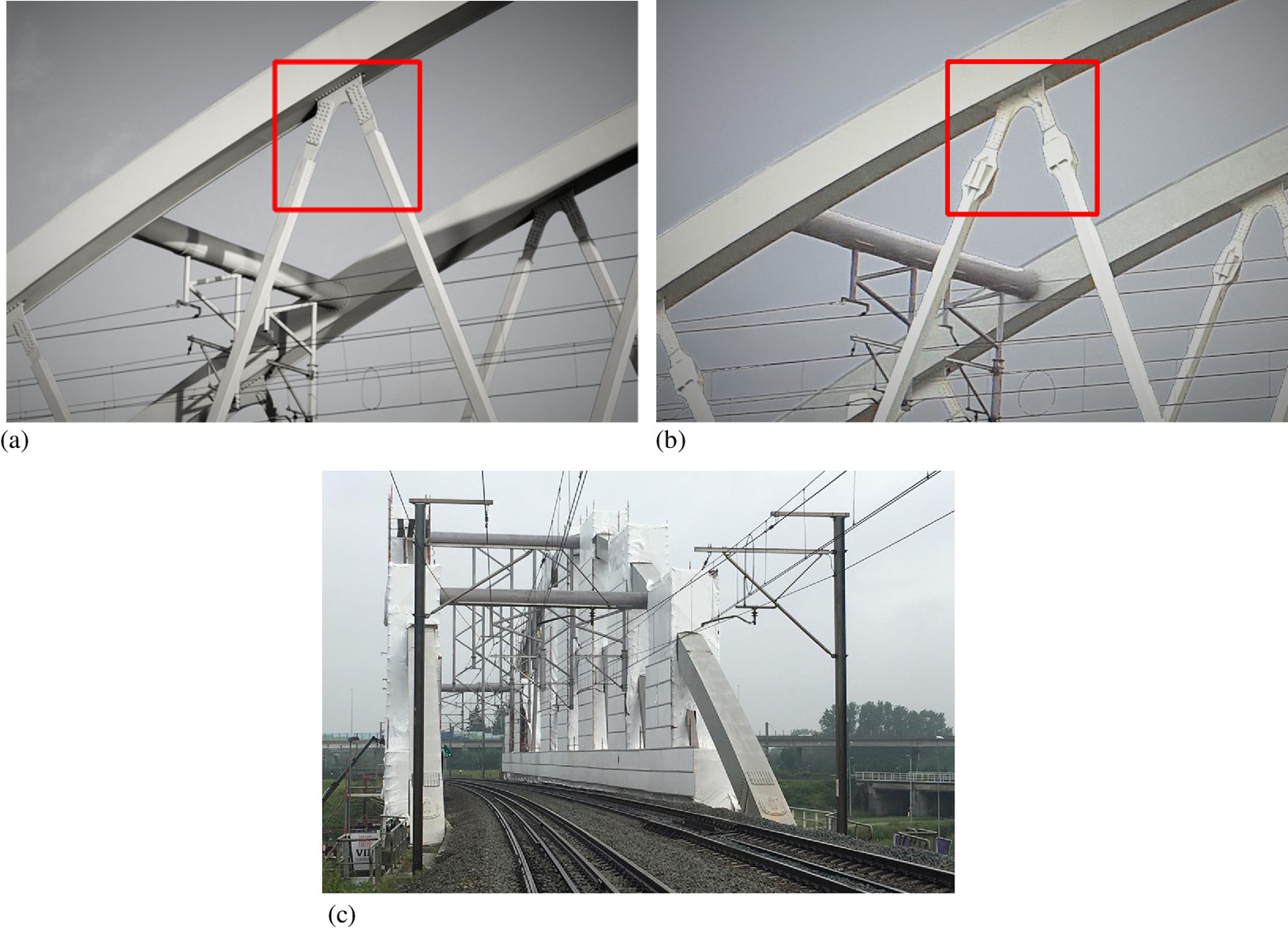
该铁路桥自 2018 年 10 月 2 日起接受监测。在 2019 年 5 月 15 日至 9 月 27 日期间,对该桥进行了改造,以解决检查中发现的施工错误。改造包括加固斜线与拱门和桥面的连接。图 2 显示了改造前后这些连接处的照片,以及改造期间在桥上安装的脚手架的照片。在拱桥与桥面交汇处的原始螺栓连接处,每条斜线周围都焊接了一个钢箱。本文所述数据涉及**改造前** 7.5 个月(2018 年 10 月 2 日至 2019 年 5 月 15 日)、改造期间(2019 年 5 月 15 日至 9 月 27 日)和**改造后** 3.5 个月(2019 年 9 月 27 日至 2020 年 1 月 15 日)。
本文的结构如下。**“Measurement Setup”部分介绍了仪器和数据采集。接下来,在“Data Processing”部分,介绍了应用的数据处理方法。“Description of the Data”部分介绍了所提供的数据,包括列车通过数据、环境振动数据和模态数据(确定的固有频率、模态阻尼比和模态振型)。“Discussion”**部分讨论了所提供数据对结构工程界的价值,尤其侧重于结构健康监测(SHM)。最后是结论部分。
Measurement setup(测量准备)
铁路桥上的仪器安装分为三个阶段。第一阶段于 2018 年 10 月完成,包括在桥面安装加速度计、在桥面和连接桥面与拱门的斜线上安装应变计、在钢轨上安装应变计、在桥面下方安装热电偶和相对湿度(RH)传感器。该系统在 2019 年 9 月(第 2 阶段)扩展了拱桥上的加速度计,在 2019 年 10 月(第 3 阶段)扩展了桥梁支座上的位移传感器。图 3 提供了测量设置的总体概览。不同传感器和数据采集的详细说明见以下小节。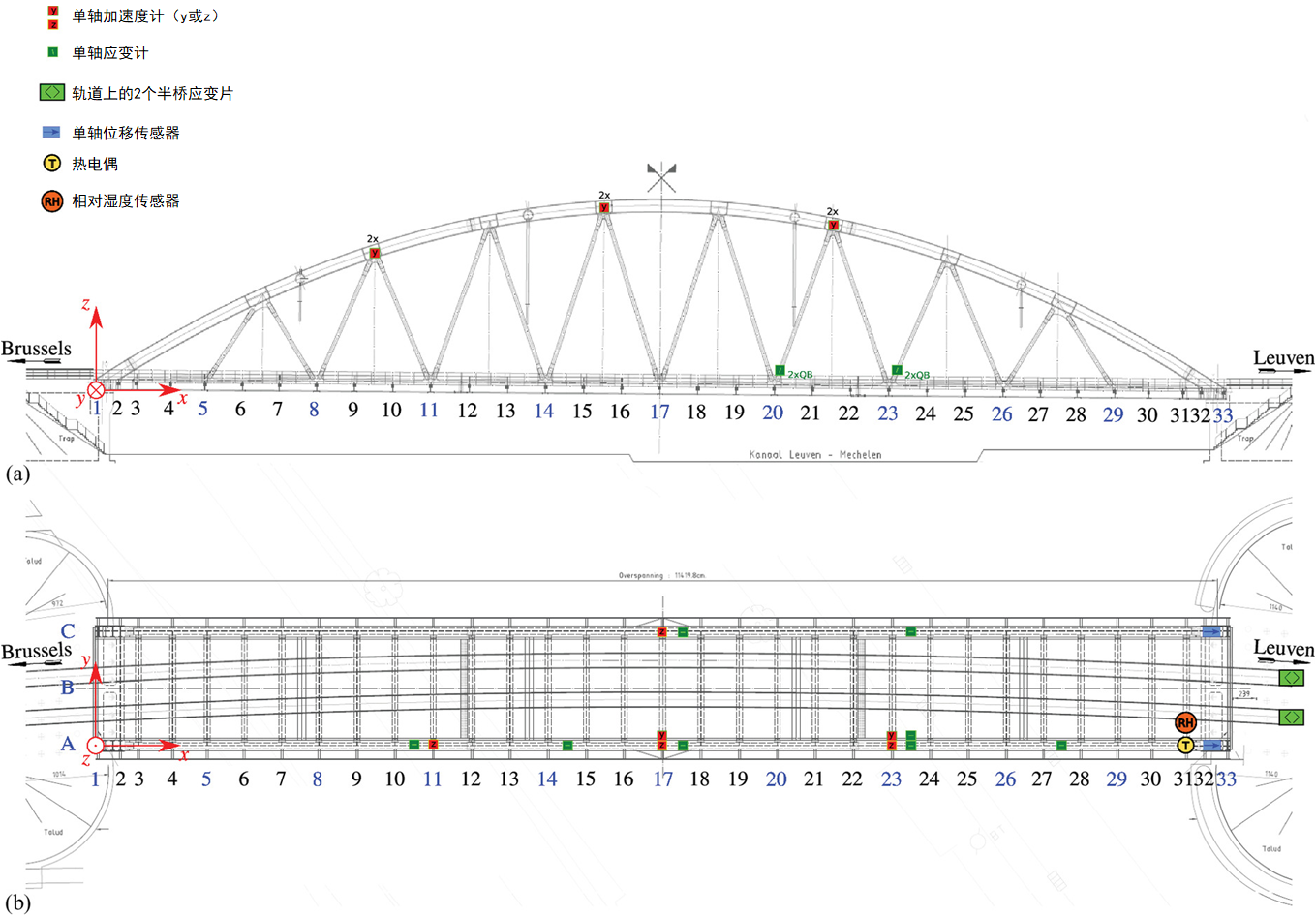
桥面和拱(Bridge Deck and the Arches)的加速度测量
桥面和拱的加速度是通过 12 个 PCB 393B04 型单轴加速度计测量的,灵敏度约为 1000 mV/g。** 桥面**上安装了六个加速度计,拱门上安装了六个加速度计。桥面上的六个加速度计安装在主桥梁的底部翼缘上,与横梁相交处。** 四个**传感器测量桥面在** 垂直(z)方向**的加速度。** 两个**传感器测量桥面** 横向(y)方向**的加速度。相应的通道标签用 aBDααβγ 表示,其中 αα 指沿纵向的测量线编号(01-33,图 3),β 指沿横向的测量线(A 或 C,图 3),γ 指测量方向(y 或 z)。桥面上的加速度计已于 2018 年 9 月安装完毕。由图可知,这六个加速度计的标签为:aBD11Az、aBD17Az、aBD17Ay、aBD17Cz、aBD23Ay、aBD23Az
**拱上的六个加速度计安装在拱门和斜线之间的交叉点上。它们测量横向(y)**的加速度。相应的通道标签用 $ a A R \alpha _ { 1 } \alpha _ { 1 } \alpha _ { 2 } \alpha _ { 2 } \beta y 表示,其中 表示,其中 表示,其中 \alpha _ { 1 } \alpha _ { 1 } 和 和 和 \alpha _ { 2 } \alpha _ { 2 }(=\alpha _ { 1 } \alpha _ { 1 } + 1) $指的是沿纵向的相邻测量线(01-33,图 3),β 指的是沿横向的测量线(A 或 C,图 3)。拱门上的加速度计已于 2019 年 9 月安装完毕。
这六个加速度计的标签为:aAR910Ay、aAR910Cy、aAR1516Ay、aAR1516Cy、aAR2122Ay、aAR2122Cy
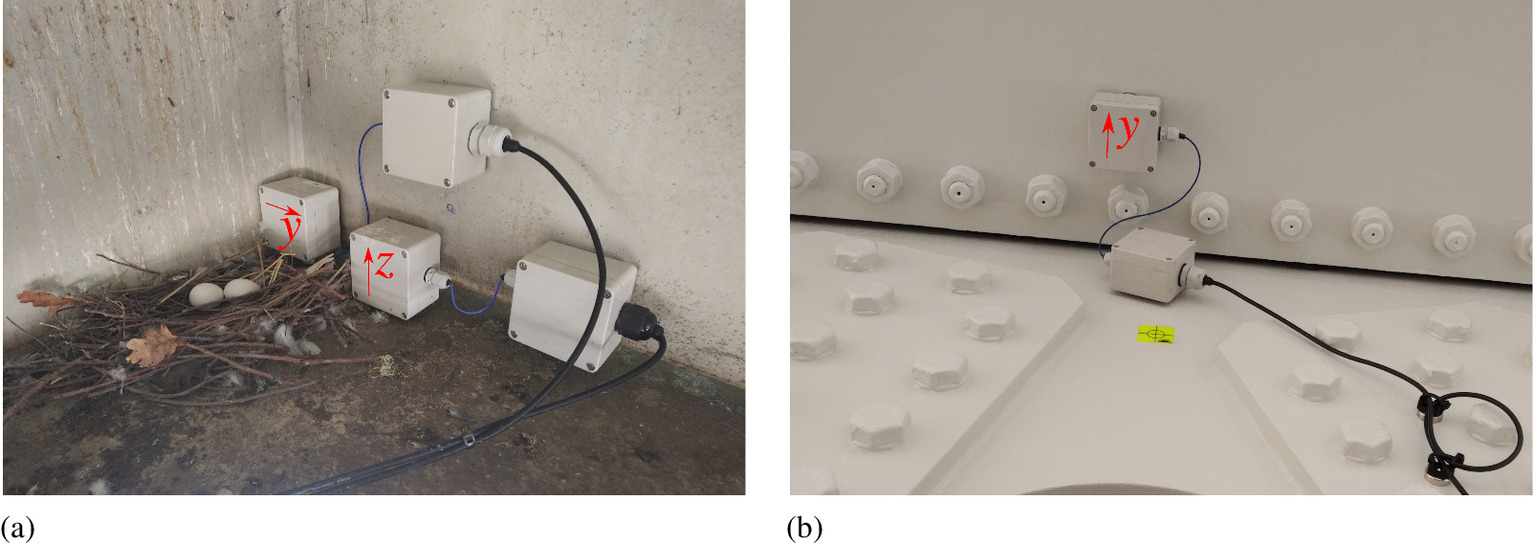
每个加速度计都安装在一个 IP66 聚碳酸酯接线盒中,该接线盒使用罐形磁铁与结构相连。图 4 显示了桥面上的加速度计 aBD17Az 和 aBD17Ay 以及北侧拱门上的加速度计 aAR1516Cy。
桥面和斜线构件(Bridge Deck and the Diagonal Members) 的应变(Strain)测量
桥面和斜线构件上的** 应变**是通过 12 个 Micro-Measurements CEA-06-250UN-350 型单轴应变片(** s****train **** g****auge**)测量的,这些应变片由标称电阻 RG = 350 Ω 的单个应变敏感元件组成。桥面上的八个应变片可测量主桥梁的纵向应变 (x)。应变片安装在以两根连续横梁为界的跨中附近。相应的通道标签用 sgBDα1α1α2α2βδ 表示,其中 α1α1 和 α2α2 (= α1α1+1)指的是两个横梁之间跨度的测量线(01-33,图 3),β 指的是沿横向的测量线(A 或 C,图 3),δ 是一个可选的指示器,当在同一垂直梁截面上测量两个应变时,底部传感器的指示器等于 B,顶部传感器的指示器等于 T。附录 I 图 21 和图 22 提供了应变片位置的详细测量布局。应变片 sgBD1011A sgBD1415A sgBD1718A sgBD1718C sgBD2324C 和 sgBD2728A 安装在桥梁内侧主梁底部翼缘的上侧。应变片 sgBD2324AB 和 sgBD2324AT 安装在主梁腹板内侧。桥面上的应变片已于 2019 年 9 月安装完毕。
斜线构件上的四个应变片可测量轴向应变(主要由轴向力和弯曲引起)。这些应变片安装在连接桥面的两根斜线上,分别位于大桥南侧(测量线 A)朝鲁汶方向的测量线 20 和 23 上(图 3)。应变片安装在矩形截面的主斜截面上,距离底部 85 厘米。附录 I 中的图 23 提供了测量布局的细节,两条斜线(20AL 和 23AL)的测量布局完全相同。通道标签用 sgDIααALη 表示,其中 αα 指的是斜线构件与桥面连接的测量线(图 3 中的 20 或 23),η 指的是应变片连接的一侧(布鲁塞尔B 或鲁汶**L **)。对角线构件上的应变片已于 2019 年 11 月 15 日安装完毕,并于 2019 年 5 月 7 日改造前拆除。改造完成后,应变片尚未重新安装。
这四个应变片的标签为:sgDI20ALB、sgDI20ALL、sgDI23ALB、sgDI24ALL
每个应变片都包含在惠斯通电桥电路中[图 5(a)],因此采用四分之一桥结构。惠斯通电桥由美国国家仪器公司(NI)的 9237 模块与电阻 R3 = 350 Ω 的物理通孔电阻器共同完成,该模块还负责数据采集(详见 "数据采集 "部分)。激励电压 Vex = 5 V。LabVIEW 将输出电压 Vch 转换为物理单位(应变 ε),其中包括标称应变片电阻 RG = 350 Ω、测量系数 k = 2. 16 以及连接应变片和数据采集单元的导线电阻,即所谓的导线电阻 RL。该电阻在安装应变片后使用数字万用表进行测量。正应变 ε 对应于拉伸,负应变对应于压缩。所采用的四分桥结构不考虑应变片的(低频)温度漂移。
安装后,应变片使用 Micro-Measurements M-Coat F 涂层进行保护。图 5(b) 是应变片 sgBD1718A 的照片。
轨道应变(Strain)测量
钢轨上的应变是通过四个微型测量仪器 CEA-06-250UR-350 型应变片测量的,应变片由三个应变敏感元件(45°、0°和-45°)组成,每个应变敏感元件的标称电阻 RG = 350 Ω。在轨道 A 和 B 中,北侧的轨道上安装了两个应变片,它们安装在 UIC60 轨道轮廓的中轴线上,彼此相距 4.2 米(图 6)。通道标签用 sgRAβδ 表示,其中 β 指的是轨道(A 或 B),δ 指的是安装[应变花](https://www.hbm.com/cn/7330/what-is-a-strain-gauge-rosette/)的区段(布鲁塞尔或鲁汶)。附录 II 图 24 提供了测量布局的详细概览。请注意,轨道 A 上的应变片 sgRAAL 安装在距离轨道伸缩缝约 0.5 米处,伸缩缝代表轨道的不连续性(图 24)。轨道 B 的钢轨伸缩缝距离鲁汶约 30 米。这四个应变片的标签为:sgRAAL、sgRAAB、sgRACL、sgRACB
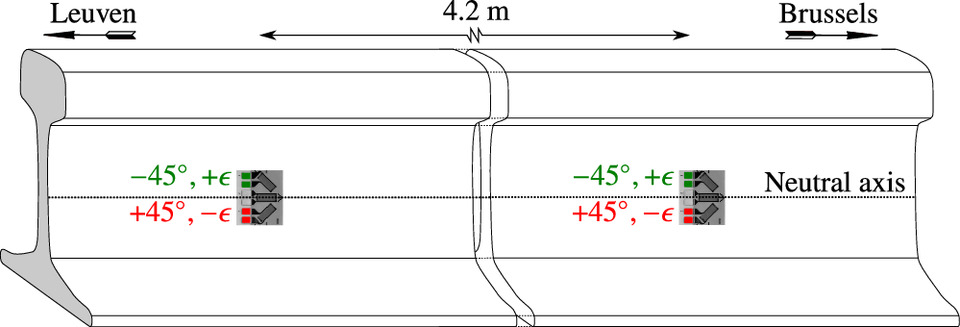
对于每个应变花(rosette),与导轨中性轴成 45° 和 -45° 角的应变敏感元件都包含在惠斯通电桥电路中,因此采用半桥配置[图 7(a)]。假设位于 45° 和 -45° 位置的量规中的应变大小相等,符号相反。不使用与中性轴(0°)对齐的量规。惠斯通电桥由 NI 9237 模块完成[图 7(a) 中的 R1 和 R2],该模块还执行数据采集(在 "数据采集 "一节中描述),并为电桥测量提供信号调节和电源。激励电压 Vex = 5 V。通过 LabVIEW 将输出电压 Vch 转换为物理单位(应变 ε),其中包括标称应变片电阻 RG = 350 Ω、测量系数 k = 2.12 和导线电阻 RL(安装应变片后使用数字万用表测量)。正应变 ε 与沿 -45° 方向的拉力相对应。与电桥上应变片采用的四分桥结构不同,半桥结构可以考虑应变片的温度漂移。
安装完成后,应变片使用 Micro-Measurements M-Coat F 涂层进行保护。图 7(b) 是应变片 sgRAAL 的图片。
轴承位移测量
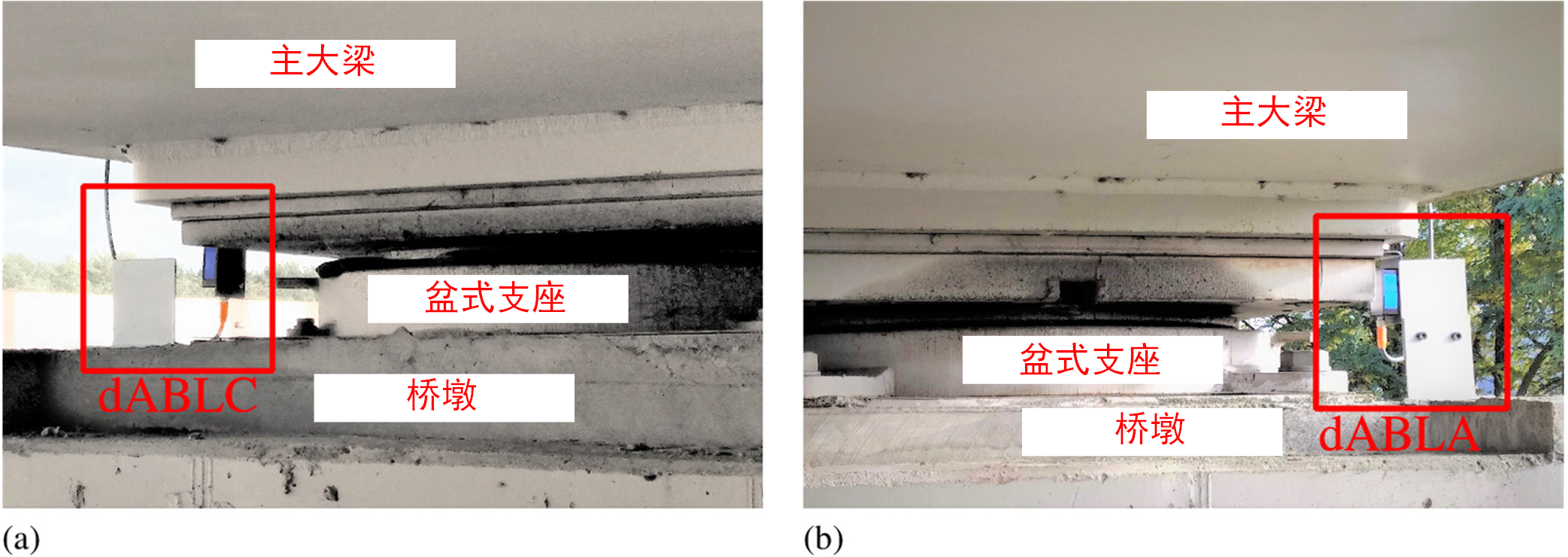
桥梁由四个盆式支座(pot bearings)支撑。支撑环境如图 8 所示。在布鲁塞尔一侧,纵向运动是固定的。在鲁汶一侧,支座允许纵向运动。在鲁汶一侧的支座上,使用两个 Welotec OWLL 8025 AD S1 型激光位移传感器测量桥梁与支座之间的相对纵向 (x) 位移,传感器的工作范围为 50 至 250 毫米,分辨率为 6.3 微米。对轴承进行位移测量的目的是研究盆式轴承的行为,发现盆式轴承的行为是非线性的。正位移相当于桥梁的伸长。位于测量线 A 和 C 的传感器的通道标签分别用 dABLA 和 dABLC 表示(图 3)。位移传感器已于 2019 年 10 月 18 日安装完毕。图 9 是两个位移传感器安装后的照片。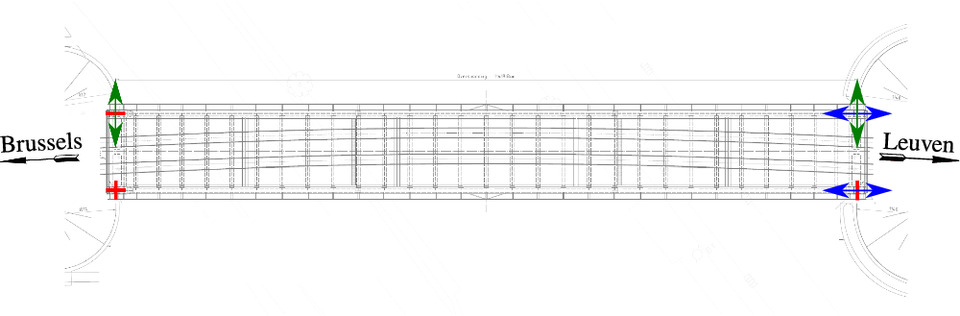
温度和相对湿度测量
桥面下的钢材表面温度通过线长为 2 米的 Labfacility T 型热电偶进行测量。构成感温元件的焊接热电偶接点用胶带固定在横梁 31(图 3)的钢材表面上。通道标签用 tBD31A 表示。通过灵敏度为 25.68mV/% 的 HM1500LF 湿度传感器测量相对湿度。68mV/% 。传感器安装在热电偶传感器旁边。通道标签用 rhBD31A 表示。
数据采集
测量通过 NI 数据采集系统进行。该系统由一个 NI cDAQ 9178 USB 机箱组成,机箱中配备了三个用于加速度计的 NI 9234 ICP 模块、四个用于应变的 NI 9237 模拟输入桥模块,以及一个用于位移、温度和相对湿度的 NI 9219 模拟输入模块。NI 测量系统执行信号的 A/D 转换,并为加速度和惠斯通电桥测量提供电源。该系统与一台戴尔 Optiplex 7060 微型 64 位台式计算机相连,用于数据采集和数据处理。数据采集硬件安装在一个 IP66 钢柜中(图 10),安装在桥面下方的一根横梁上。
数据采集使用 LabVIEW 2018 执行。不同的 NI 模块通过 NI-DAQmx 驱动程序进行同步。在时间同步中,选择 NI 9234 模块中的一个模块为 NI cDAQ 9178 USB 机箱中的其他模块提供时间参考。这使得加速度和应变测量的时间精度达到 50 PPM,同时防止了不同通道之间的漂移。位移、温度和相对湿度测量可能会出现时钟漂移,下文将对此进行说明。
加速度采集
对于 NI 9234 模块,A/D 转换以 24 位分辨率在 ±5 V 范围内进行。A/D 转换以过采样为基础:转换以极高的频率进行,通过具有固定截止频率的模拟低通滤波器避免混叠。数字信号随后以较低的频率(采样频率fs)重新采样,通过一个截止频率可变的数字低通滤波器来避免混叠。采样频率 fs = 1651.6 Hz。应变采集
对于 NI 9237 模块,A/D 转换以 24 位分辨率在 ±25 mV/V 范围内进行。这里也采用了过采样原则,使用相同的采样频率 fs = 1 651.6 Hz。位移、温度和相对湿度采集
对于 NI 9219 模块,热电偶测量的 A/D 转换范围为 24 位分辨率下的±125 mV,位移和相对湿度测量的 A/D 转换范围为 24 位分辨率下的±15 V。模拟输入(电压)的 A/D 转换在高分辨率模式下进行,因此采样时间步长为 510 毫秒。与 NI 9234 和 NI 9237 模块不同,NI 9219 模块不包括 Delta Sigma A/D 转换器。因此,A/D 转换不涉及抗混叠滤波,而且 NI 9219 模块获取的数据可能会发生与通道相关的时钟偏移(最长可达数秒)。原始数据以 NI .tdms 文件格式存储,每个文件包含 5 分钟测量时间的数据。完成后,每个 tdms 文件都将使用 MATLAB 转换为物理(SI)单位。转换后的数据以 MATLAB .mat 文件格式存储。
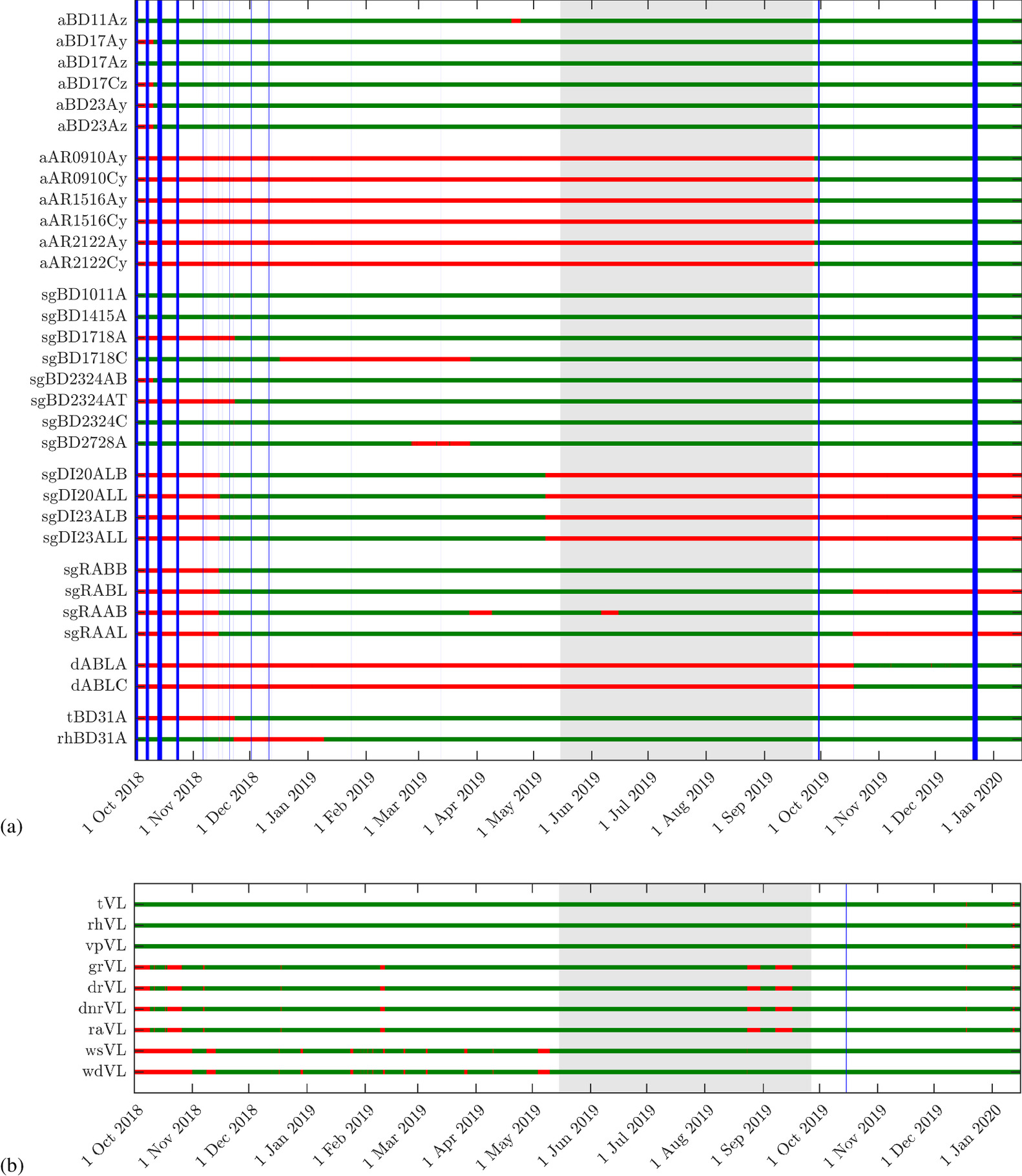
在 2018 年 10 月 2 日至 2020 年 1 月 15 日期间,数据采集系统有 97.7% 的时间处于活动状态。图 11(a)通过甘特图概述了数据采集系统的活动和不同传感器的运行情况。其中不包括持续时间少于 5 分钟的中断。
其他环境数据
在整个测量期间,鲁汶大学建筑物理组还在弗利特大楼收集了额外的环境数据。这栋大楼位于鲁汶大学校园内,距离桥址约 5 公里(坐标:纬度 50.8599,经度 4.6792)。环境数据以小时为单位提供,包括以下数量。- 以 °C 为单位的平均气温(标签:tVL)。
- 平均相对湿度,单位 %(标签: rhVL)。
- 平均蒸汽压力,单位 Pa(标签:vpVL)。
- 以 W/m2 为单位的平均全球辐射(标签: grVL)。
- 以 W/m2 为单位的平均漫射辐射(标签: drVL)。
- 以 W/m2 为单位的直接正常辐射平均值(标签:dnrVL)。
- 总雨量,以毫米为单位(标签: raVL)。
- 离地面 10 米处的平均风速(单位:米/秒)(标签:wsVL)。
- 地面以上 10 米处的平均风向,以北纬°为单位(标注:wdVL)。
图 11(b) 通过甘特图概述了弗利特大楼不同传感器的运行情况。
数据处理
采集的数据已经过预处理,以提高存储效率和优化数据质量。信号处理按照以下程序进行。加速度数据
加速度信号经过抽取,将采样频率降低了 2 倍。这种细化处理大大减小了数据量,同时也省略了 PCB 393B04 加速度计测量范围(0.06-450 Hz)之外的高频成分。信号首先通过八阶切比雪夫 I 型低通滤波器进行低通滤波,截止频率为 330.3 Hz,通带中的峰峰值纹波为 0.05 dB。滤波器同时应用于正向和反向,以消除所有相位失真。滤波信号的重采样率为 825.8 Hz。信号经过抽取后,再通过一个截止频率为 0.2 Hz 的四阶巴特沃斯高通滤波器进行正向和反向高通滤波。滤波器的目的是去除受测量噪声污染的低频成分。最后,所有加速度通道的平均值都已去除。桥面和斜线应变
应变信号使用与加速度信号相同的方式,也进行了2倍降采样,采用与加速度信号相同的程序。降采样后,信号通过一个八阶切比雪夫 I 型低通滤波器进行额外的低通滤波,该滤波器的截止频率为 16 Hz,在正向和反向通带中的峰峰值纹波为 0.1 dB。滤波器的目的是去除高频测量噪声。最后,对应变信号进行移位,以获得与给定事件相对应的时间序列中第一个样本的零应变值。轨道应变
应变信号的降采样系数为 2,采用与加速度信号相同的程序。去噪后,信号通过一个五阶切比雪夫 I 型低通滤波器进行额外的低通滤波,该滤波器的截止频率为 80 Hz,通带中的峰峰值纹波为 0.滤波器的目的是去除高频测量噪声。最后,对应变信号进行移位,以获得与给定事件相对应的时间序列中第一个样本的零应变值。位移、温度和相对湿度
对位移和环境数据没有进行额外的信号处理。由于高压铁路电气化的电磁干扰,信号受到频率为 50 Hz 倍频的电噪声污染。应变测量尤其如此。电噪声振幅随时间变化很大。根据应用情况,可能需要对数据进行额外过滤。
数据说明
列车通行
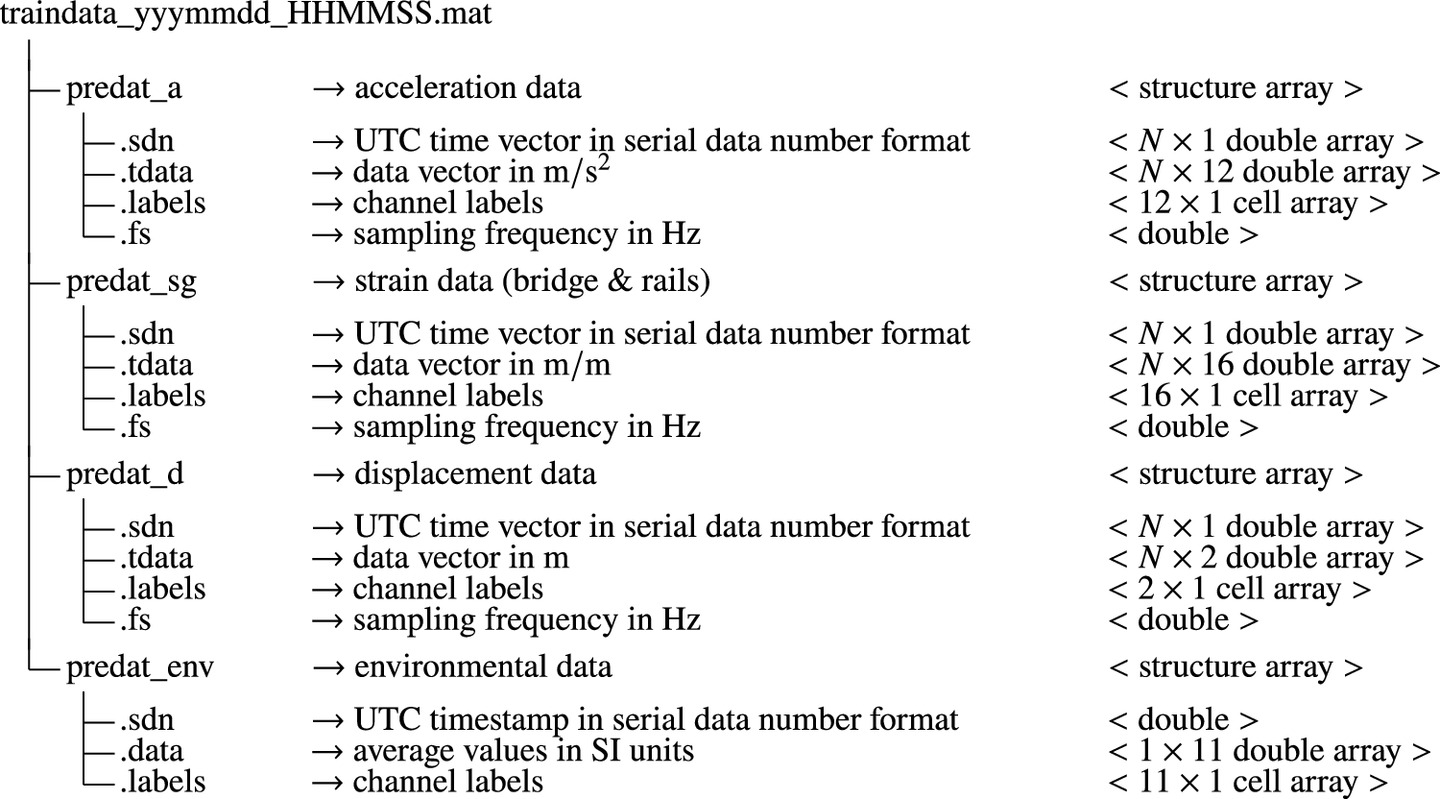
从处理过的数据中,通过软件触发识别出列车运行轨迹。作为触发信号,计算出加速度 aBD11Az 的一秒移动均方根 (RMS) 值,以及阈值为 0.04 m/s2。在大桥运行的每一天,都有两趟列车通过,分别是欧洲中部时间** 上午 9 点后**的第一趟列车和** 下午 6 点后**的第一趟列车,其中欧洲中部时间是指UTC 1(冬令时)和UTC 2(夏令时)。对于给定的列车通过时间,提供的振动数据(加速度、应变和位移)的时间窗口从列车** 进入桥梁前 10 秒开始**,直到列车** 离开桥梁后 30 秒**。在桥址和 Vliet 大楼收集的环境数据是列车通过期间的平均值。某些时间窗口包括列车在 A 轨道和 B 轨道上的连续两次通过。单趟列车的相应数据以 MATLAB .mat 文件格式存储在单独的文件中。文件名用 "traindata_yyyymmdd_HHMMSS.mat "表示,其中 yyyymmdd_HHMMSS 表示列车运行开始时对应的 UTC 时间(yyyy:整年,mm:月,dd:日,HH:时,MM:分,SS:秒)。图 12 提供了列车通过数据文件的结构概览。当某个传感器不存在或不工作时,数值数据将以 “NaN”(非数字)代替。
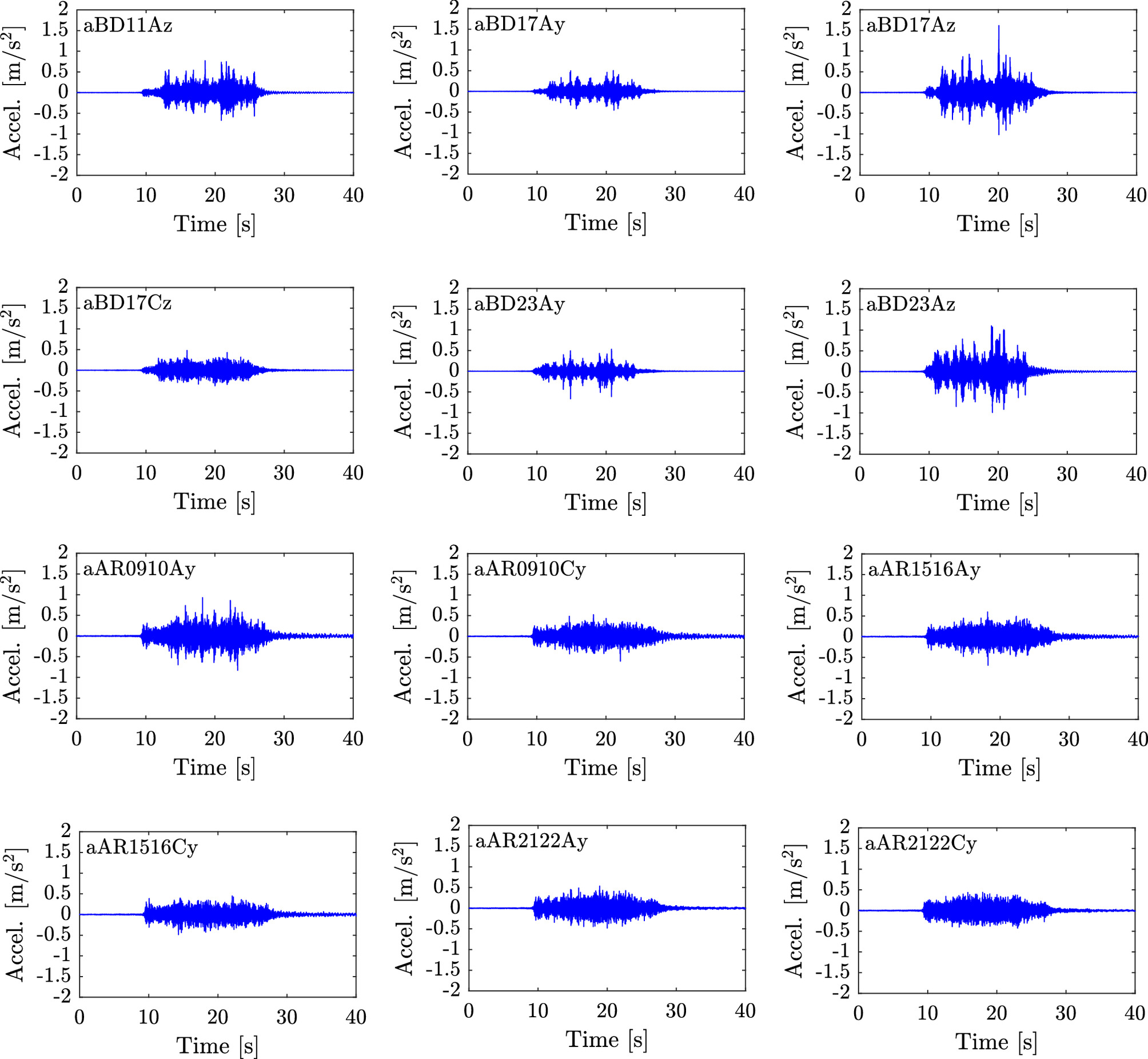
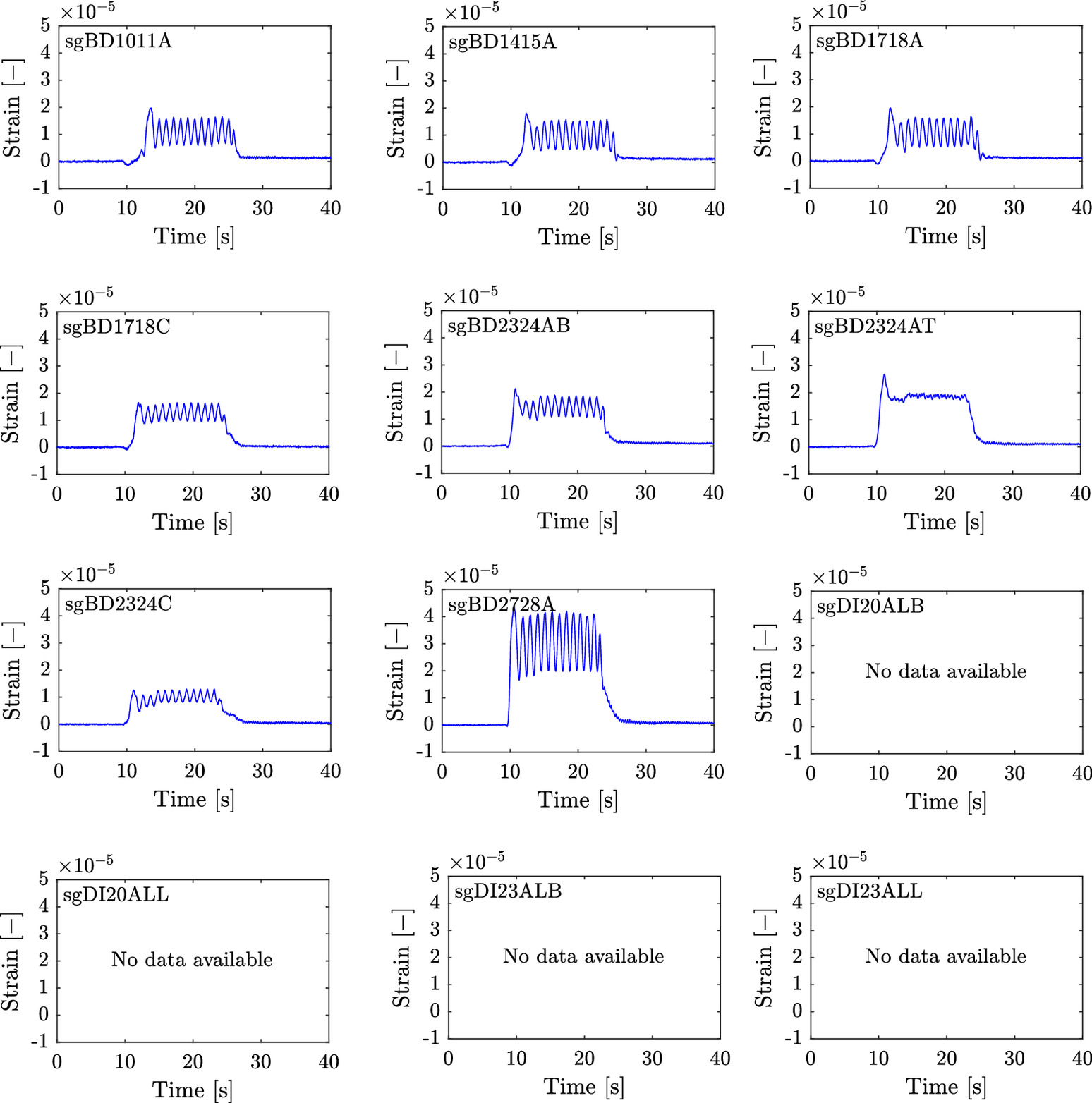
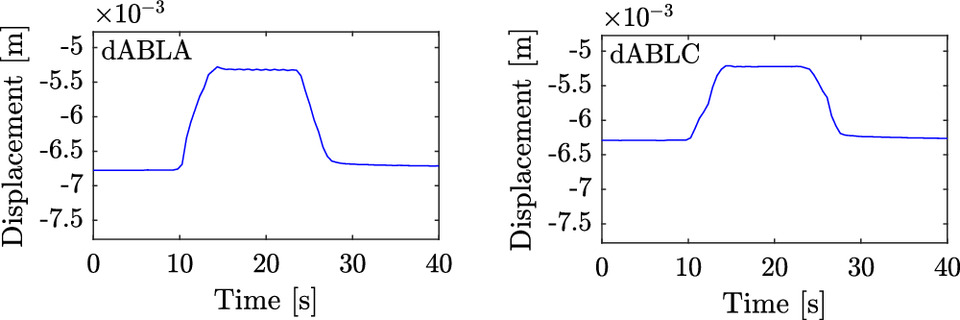
例如,图 13-16 显示了 2019 年 11 月 4 日 08: 01: 20 UTC(09: 01: 20 CET,在轨道 B 上通过,文件名为 “traindata_20191104_080120. mat”)列车通过时的振动数据(加速度、应变和位移)。生成图 13-16 中各幅图的 MATLAB 脚本已添加到数据集中(文件名为 “plot_trainpassage.m”)。

环境振动数据
在监测期间的每一天,提供第 1、5、9、13、17 和 21 小时(UTC)内 5 分钟的环境振动数据。环境振动时段选择如下:- 使用上一小节所述的软件触发来识别列车运行。计算列车经过的时间间隔(对应于环境振动周期)。
- 如果有多个持续时间为 5 分钟的环境振动时段,则只保留该小时内的第一个时段。
- 如果所选小时内所有环境振动时段的持续时间都小于 5 分钟,则保留持续时间最长的时段。
环境振动数据有两种情况。如果所选时间段伴随火车通过,则振动主要由自由衰减组成。否则,如果所选时间段之前没有火车通过,例如在夜间,桥梁振动主要是由风荷载和桥下的车辆通行引起的。
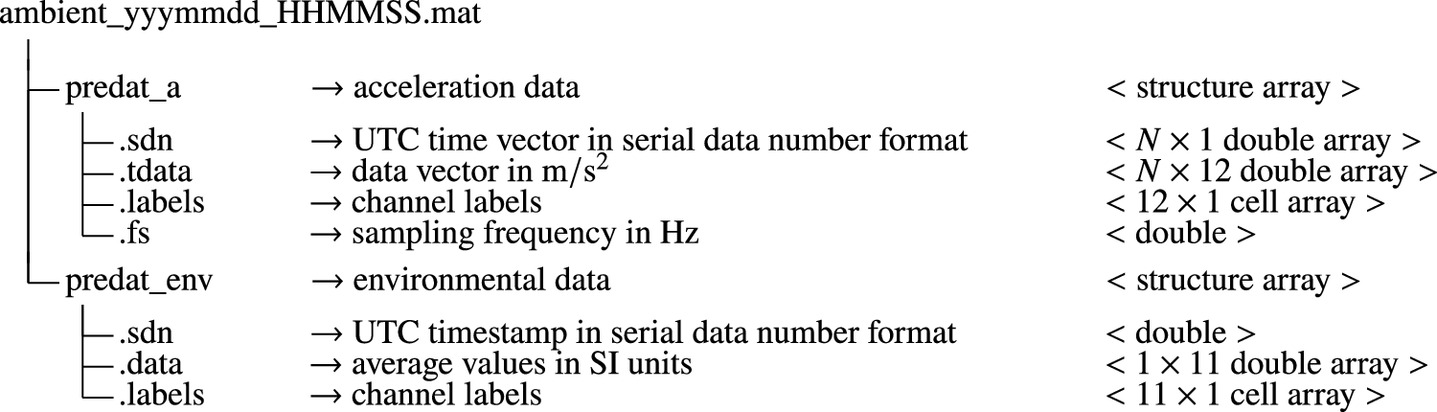
在给定的环境振动时间段内,加速度时间历史数据与在桥址收集的平均环境数据以及在弗利特大楼收集的当小时环境数据一起提供。没有提供应变和位移数据,因为信号水平没有超过噪声底限。环境振动数据以 MATLAB .mat 文件格式存储在单独的文件中。文件名用 "ambient_yyyymmdd_HHMMSS.mat "表示,其中 yyyymmdd_HHMMSS 表示时间段开始时对应的 UTC 时间(yyyy:整年,mm:月,dd:日,HH:小时,MM:分钟,SS:秒)。图 17 提供了环境振动数据文件的结构概览。当某个传感器不存在或不工作时,数字数据值将以 "NaN "代替。
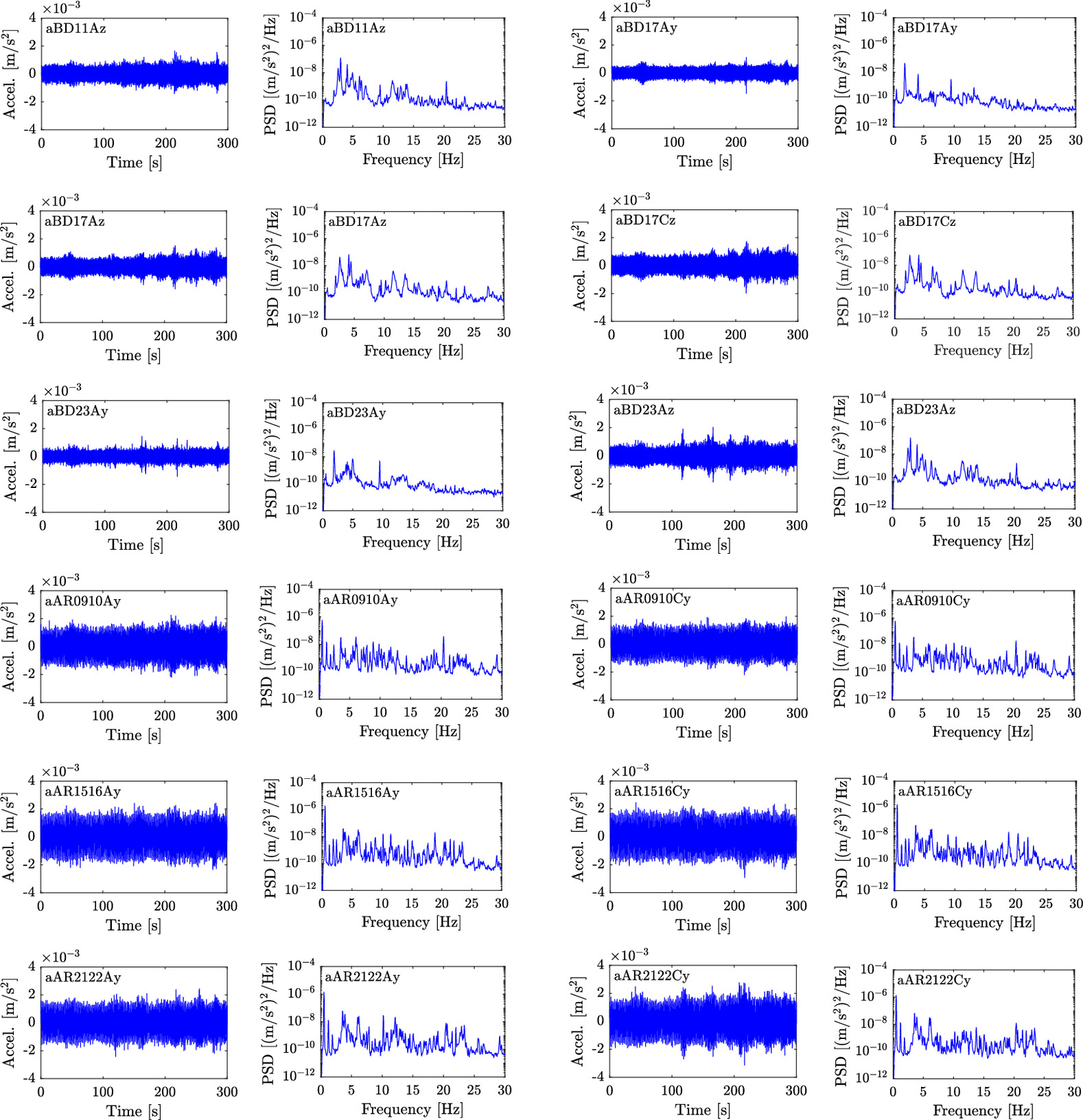
例如,图 18 显示了从UTC 2019 年 12 月 28 日 00:00 开始的 5 分钟环境振动时间历史数据和加速度数据的双侧功率谱密度 (PSD)(文件名为 “ambient_20191228_000000.mat”)。在所选时间段内,振动主要由风荷载引起。生成图 18 中各图的 MATLAB 脚本已添加到数据集中(文件名为 “plot_ambient. m”)。
确定的模式特征
上一节中讨论的环境振动数据被用于每小时进行一次运行模态分析(OMA)。其结果是铁路桥的模态参数(固有频率、模态阻尼比和模态振型)随时间的变化情况。模态分析基于从桥面和拱中测量获得的预处理加速度数据(如有,见图 11(a))。在系统识别之前,对加速度信号进行抽取,以进一步降低采样频率(系数为 20)。首先使用八阶切比雪夫 I 型低通滤波器对信号进行低通滤波,截止频率为 16.5 Hz,通带的峰峰值纹波为 0.05 dB。滤波器同时应用于正向和反向,以消除所有相位失真。滤波信号的重采样率为 41.3 Hz。使用基于参考的协方差驱动随机子空间识别(SSI-cov/ref)算法(Peeters 和 De Roeck,1999 年)对得到的加速度信号进行处理。托普利兹矩阵的块行数为 200。在构建稳定图时,考虑的模型阶数范围从 50 到 250,每 2 阶递增。在算法中,所有加速度输出都被用作参考输出。
利用 Magalhaẽs 等人(2009 年)提出的聚类方法,对代表 SSI-cov/ref 算法结果的稳定图进行了自动解释。最终目的是将代表同一物理模式(不同模型阶)的估计模式分组,从而避免与物理无关的数值模式(也称为虚假模式)。这些虚假模态往往随模型阶数的变化而变化较大,我们利用这一特点将它们与物理模态区分开来。聚类包括以下步骤:
- 预选潜在的稳定模式是通过实施以下一系列稳定标准来实现的:
- 两个连续模型阶次之间的固有频率变化必须小于 0;
- 两个连续模型阶次之间模态阻尼比的(相对)变化必须小于 5%;
- 模态阻尼比必须在区间 [0%, 10%] 内;
- 模态相位共线性(MPC,Heylen 等人,1997 年)必须大于 0.5。
不符合所有标准的模态在接下来的步骤中将被省略。
所有保留的潜在稳定模式(i 和 j)之间的距离计算公式如下:
$ \begin{equation}\label{eq1}
d _ { i , j } = \alpha \frac { f _ { i } - f _ { j } } { ( f _ { i } + f _ { j } ) / 2 } + \beta ( 1 - M A C _ { i , j } )
\end{equation} $
其中,fi 是模态估计值 i 的确定固有频率,MACi,j 是模态估计值 i 和 j 的模态振型向量之间的模态保证准则(Allemang,2003 年)。
- 根据公式(1)中定义的距离,采用非加权平均联系算法(Sokal 和 Michener,1958 年)对模式进行分层聚类。两个聚类之间的距离等于一个聚类中的任何模式与另一个聚类中的任何模式之间的平均距离。
- 通过规定任何两个聚类之间的最小(平均)距离来确定独立的聚类。研究发现,采用 Magalhaǡ提出的阈值 0.02 的阈值会产生良好的结果。
- 只有具有 30 个或更多元素的聚类才会被保留。这意味着所选模式至少存在于 30% 的模型阶次中。
- 在每个簇内进行离群值分析,以去除具有极端阻尼值的模式。这些异常值很可能是由于识别不准确造成的,因此应予以剔除。如果一个群组的模态阻尼比低于下四分位数减去 1.5 倍四分位数间范围,或高于上四分位数加上 1.5 倍四分位数间范围,则该群组的模态估计值将被剔除。
- 最后,对每个群组的模态参数(固有频率、模态阻尼比和模态振型)求平均值。
在对稳定图进行自动解释之后,还需要进行一个额外的聚类步骤,以便对多个数据集中出现的模式进行分组。对于给定的模式,这样就可以跟踪模式特征随时间的变化。在这一聚类步骤中,采用公式(1)中的距离度量来寻找连续两个小时中的相似模式。每个模式的权重系数 α 和 β 都是手动调整的,以便实现精确的模式跟踪。
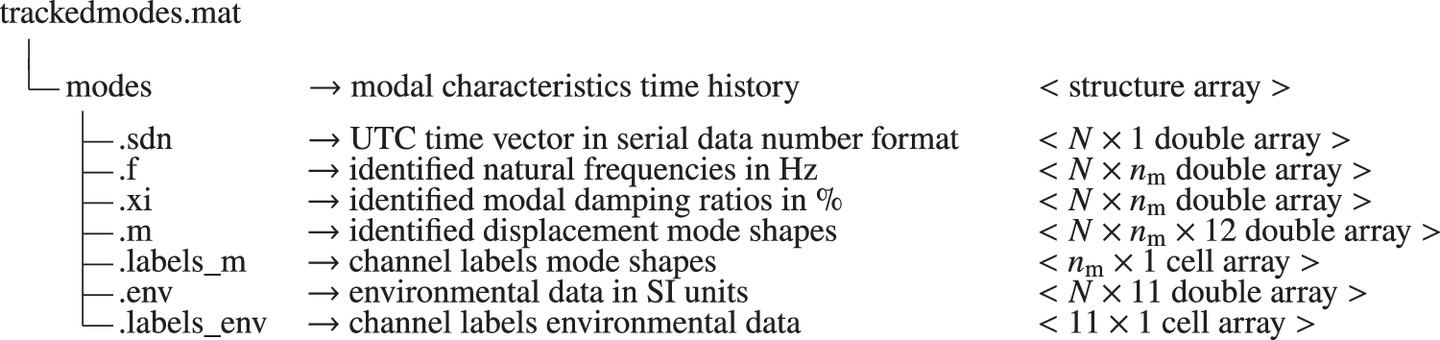
已识别(跟踪)模态特征的时间历程以 MATLAB .mat 文件格式存储在一个文件中,文件名为 “trackedmodes.mat”。对于每个数据点(即每小时),都会添加前一小时在桥址收集的平均环境数据和在 Vliet 大楼收集的环境数据。图 19 是文件结构概览。如果给定数据集(1 小时)中没有确定某个模态,则所有模态特征的数值均以 "NaN "代替。这同样适用于与不存在或不运行的传感器以及不可用的环境数据相对应的模式形状成分。
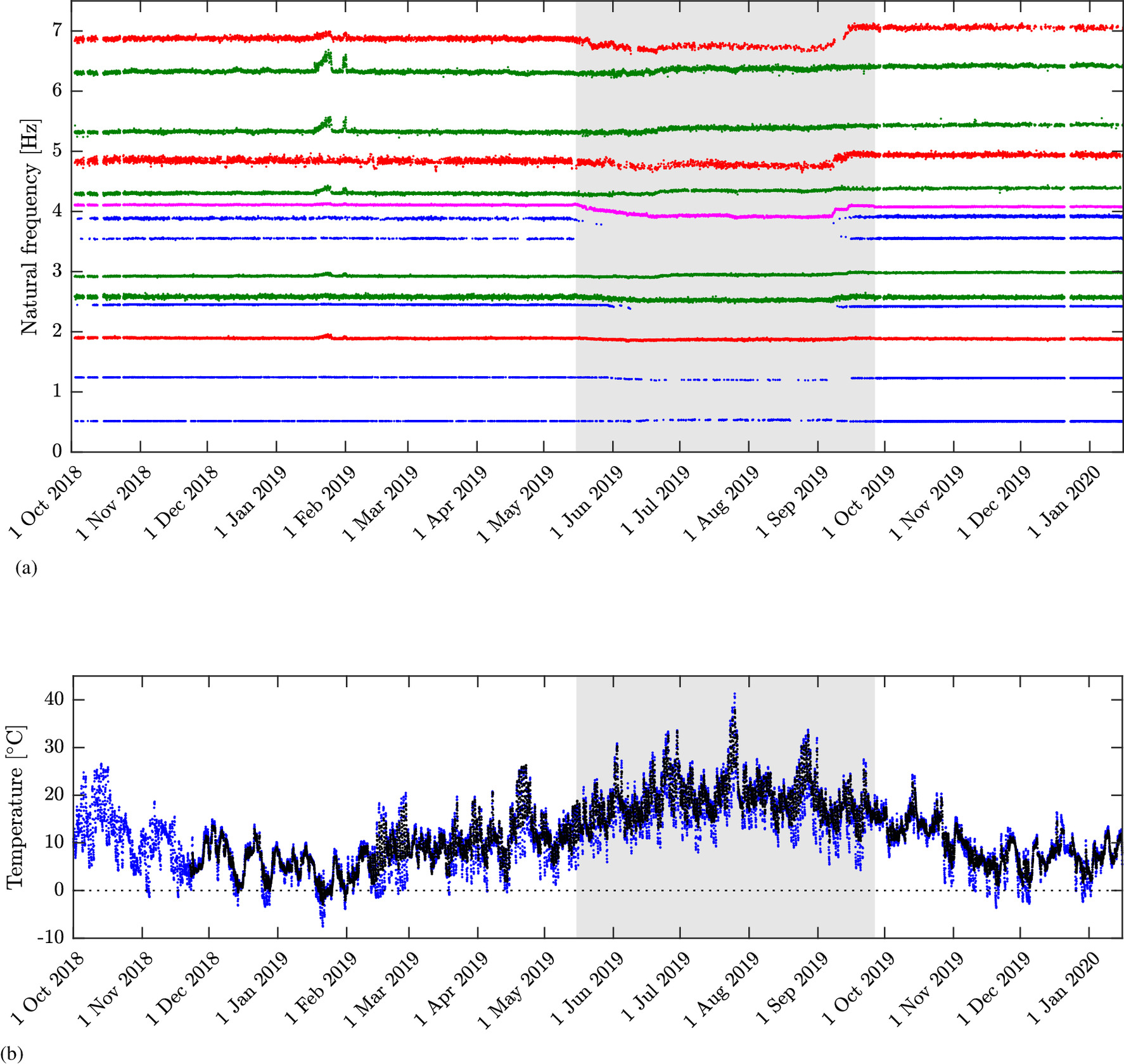
随着时间的推移,总共跟踪了 14 种模式(nm = 14)。但要注意的是,没有一种模式的识别成功率是 100%,即在监测期间的每个小时都能识别。这是因为模态的激发随时间而变化,因此实际识别率也随之变化。表 1 提供了已识别模式的概况,包括平均固有频率和改造前后的识别成功率 (SR),以及模式形状的描述。成功率的定义是:已识别出特定模式的 1 小时时间窗数量除以已收集数据的总小时数(百分比)。该说明基于监测前进行的详细 OMA 所获得的模式振型。获得的详细模式振型见附录 III。最后要注意的是,5 分钟的窗口长度相对较短,可能会导致阻尼估算的不确定性相当大,尤其是对于固有频率约为 0.51 Hz 的最低模式。然而,窗口长度是由于白天列车运行频率较高,导致环境振动时间相对较短而造成的。
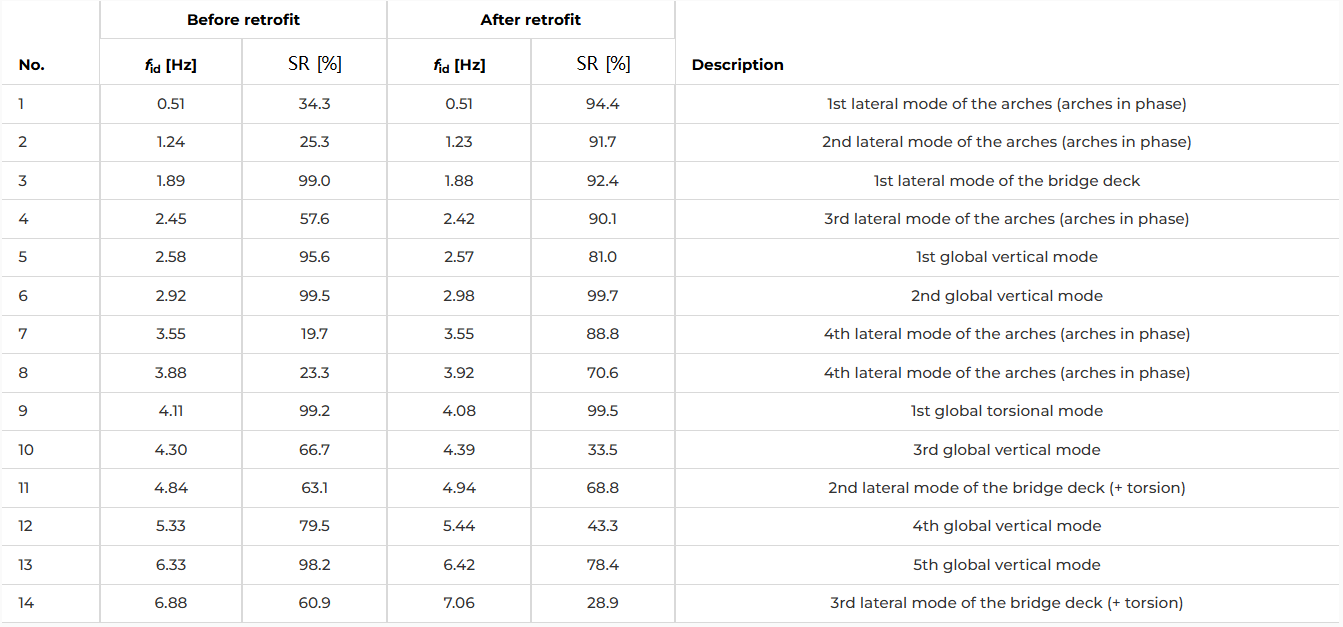
图 20 显示了已识别自然频率随时间的变化,以及桥面下表面温度(tBD31A)和 Vliet 大楼空气温度(tVL)的变化。温度对大多数模式已识别自然频率的影响是显而易见的,尤其是在 2019 年 1 月的霜冻期。在改造期间,由于桥梁两侧的脚手架覆盖了整个桥梁长度,自然频率发生了显著变化[图 2©]。对于某些模态,无法在改造过程中继续进行模态跟踪。加固后,与加固前相比,自然频率的变化很小,但很明显(表 1)。最后,还观察到改造后识别成功率的变化。特别是,由于改造后在拱上安装了六个额外的加速度计,拱横向模态的识别成功率大幅提高。与(早先安装的)桥面上的测量值相比,这些传感器获得的加速度测量值对拱桥的横向弯曲模式更加敏感。
讨论
所提供的数据集尤其有助于开发和验证在不断变化的环境条件下进行 SHM 的数据驱动方法。它可与各种黑盒和灰盒建模技术相结合,用于损伤检测,包括从有监督的统计回归方法[如多项式混沌扩展(Deraemaeker 等人,2008 年;Spiridonakos 等人,2016 年)]到无监督的机器学习方法[如支持向量机(Ni 等人,2005 年)、核主成分分析(Reynders 等人,2014 年)或人工神经网络(Wu 等人,1992 年)]。 所提供的数据集具有以下优点:- 提供了一个异构数据集,其中包括加速度数据、应变数据、位移数据和模态数据(固有频率、模态阻尼比和模态振型)。这大大增加了使用该数据集进行验证的 SHM 技术或算法的数量。
- 提供了不同类型的事件,包括列车通过(强制振动)和环境振动。这进一步扩大了所提供数据集的应用范围。
- 振动数据还辅以大量环境数据(温度、相对湿度、辐射、雨量、风速和风向)。有了这些补充数据,就能对不断变化的环境条件下的结构行为进行全面分析。此外,环境数据对于应用所谓的输入输出系统识别技术也是必不可少的,该技术旨在明确模拟所测量的结构行为与环境条件之间的关系。
- 这组数据包括结构不同状态的数据,即改造前、改造期间和改造后的数据。通过比较不同损伤检测方法检测结构状态(实际)变化的能力,可以对其性能进行基准测试。

















 1141
1141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









