







Discrete Mathematics and its Applications (8th Edition)
2021/03/19 - Rules of Inference
Contents
1 The Foundations: Logic and Proofs
1.5 Nested Quantifiers
Prenex Normal Form
PNF is a statement which is of the form
PNF Existence Theorem
Every compound formula can be transformed into an equivalent PNF.
- Replace → , ↔ \rightarrow, \leftrightarrow →,↔ by ¬ , ∧ , ∨ \neg, \wedge, \vee ¬,∧,∨
- Move ¬ \neg ¬ before atomic formula
- Applying rule of name replacement
- Move quantifiers in the front
Prenex Conjunctive Normal Form
PCNF
1.6 Rules of Inference
1.6.2 Valid Arguments in Propositional Logic
Revisiting the Socrates Example
How to construct valid arguments
Arguments in Propositional Logic
An argument in propositional logic is a sequence of propositions. All but the final proposition are called premises. The last statement is the conclusion. An argument is valid if the truth of all its premises implies that the conclusion is true.
An argument form in propositional logic is a sequence of compound propositions involving propositional variables. An argument form is valid if no matter which particular propositions are substituted for the propositional variables in its premises, the conclusion is true if the premises are all true.
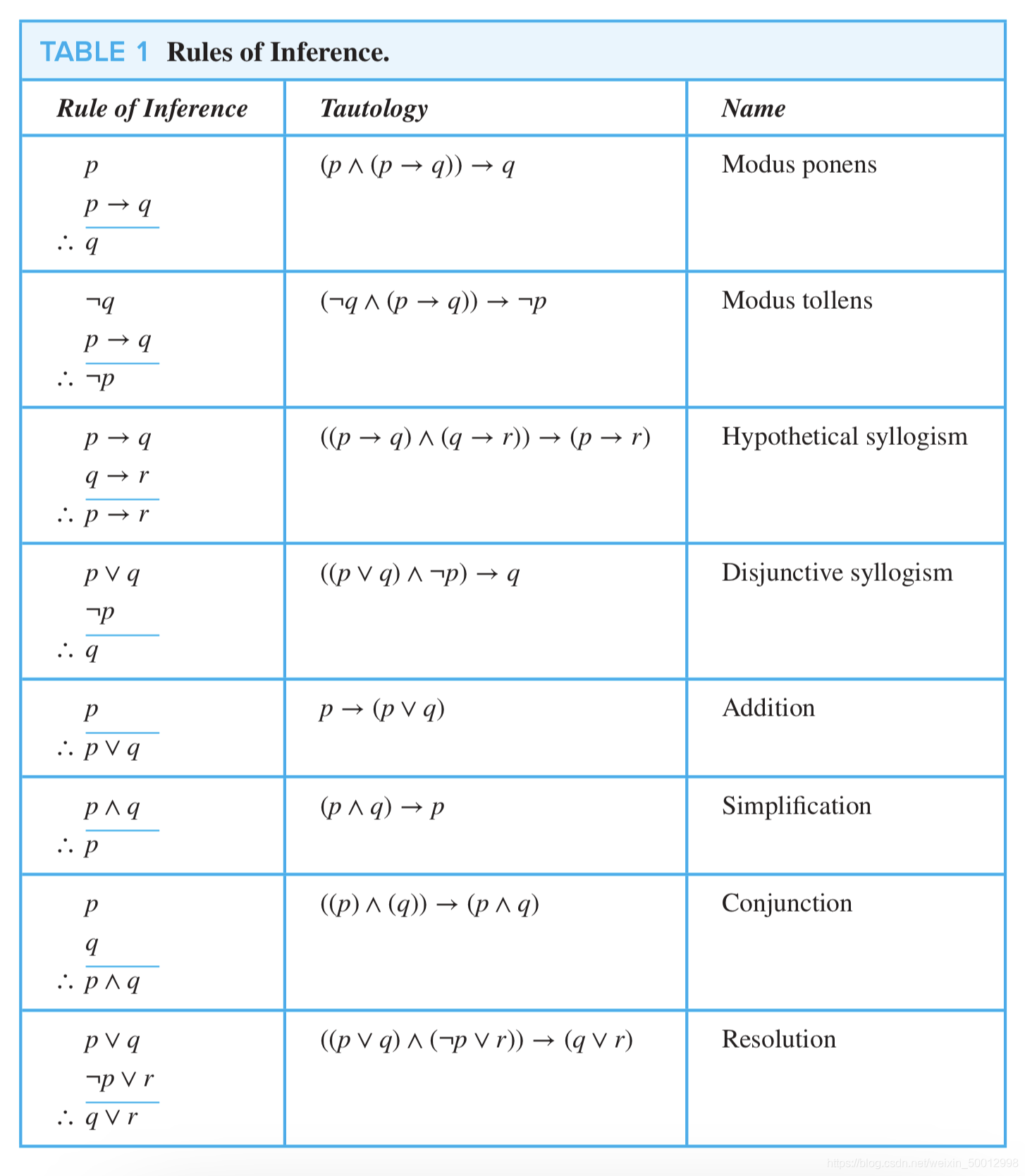
1.6.3 Rules of Inference for Propositional Logic
Modus Penens
( p ∧ ( p → q ) ) → q (p\wedge(p\rightarrow q))\rightarrow q (p∧(p→q))→q
Modus Tollens
( ¬ p ∧ ( p → q ) ) → ¬ p (\neg p\wedge(p\rightarrow q))\rightarrow \neg p (¬p∧(p→q))→¬p
Hypothetical Syllogism
( ( p → q ) ∧ ( q → r ) ) → ( p → r ) ((p\rightarrow q)\wedge(q\rightarrow r))\rightarrow (p\rightarrow r) ((p→q)∧(q→r))→(p→r)
Disjunctive Syllogism
( ¬ p ∧ ( p ∨ q ) ) → q (\neg p\wedge(p\vee q))\rightarrow q (¬p∧(p∨q))→q
Addition
p → ( p ∨ q ) p\rightarrow(p\vee q) p→(p∨q)
Simplification
( p ∧ q ) → p (p\wedge q)\rightarrow p (p∧q)→p
Conjunction
( ( p ) ∧ ( q ) ) → ( p ∧ q ) ((p)\wedge(q))\rightarrow (p\wedge q) ((p)∧(q))→(p∧q)
Resolution
( ( ¬ p ∧ r ) ∧ ( p ∨ q ) ) → ( q ∨ r ) ((\neg p\wedge r)\wedge(p\vee q))\rightarrow (q\vee r) ((¬p∧r)∧(p∨q))→(q∨r)
1.6.4 Using Rules of Inference to Build Arguments
A valid argument is a sequence of statements. Each statement is either a premise or follows from previous statements by rules of inference. The last statement is called conclusion.
A valid argument takes the following form:
S
1
S
2
S
n
⋮
∴
C
S1\\S2\\Sn\\\vdots\\\therefore C
S1S2Sn⋮∴C
Example:
Premises:
“It is not sunny this afternoon and it is colder than yesterday.”
“We will go swimming only if it is sunny.”
“If we do not go swimming, then we will take a canoe trip.”
“If we take a canoe trip, then we will be home by sunset.”
Conclusion: “We will be home by sunset.”
Solution:
- Choose propositional variables:
p : “It is sunny this afternoon.”
q : “It is colder than yesterday.”
r : “We will go swimming.”
s : “We will take a canoe trip.”
t : “We will be home by sunset.”- Translation into propositional logic:
premises: ¬p ∧ q, r → p, ¬r → s, s → t, conclusion: t.- Construct the Valid Argument
Assignment
ALL RIGHTS RESERVED © 2021 Teddy van Jerry
This blog is licensed under the CC 4.0 Licence.
See also
Teddy van Jerry’s CSDN Homepage
Teddy van Jerry’s GitHub Homepage














 5593
5593











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









