







提示:通过SPI驱动读取传感器数据
前言
制作一个倾角传感器,通过SPI读取LSM6DSRTR的加速度数据转换为角度,不用IIC的原因是考虑IIC通讯的协议过于繁琐,且会影响后续的发包速率。
一、LSM6DSRTR
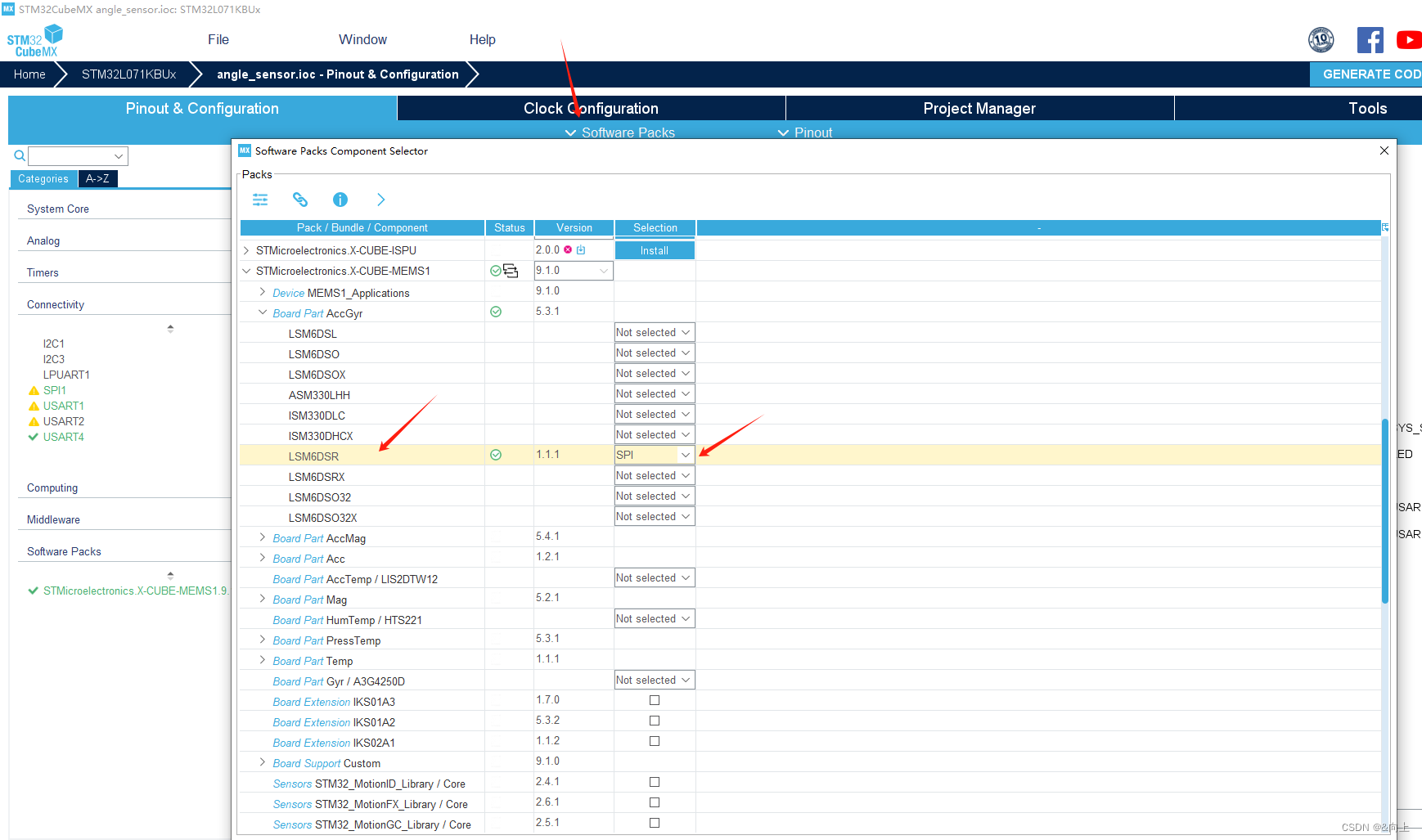
六轴传感器,最好用ST的芯片来读取,主要是ST在这块已经提供好驱动了,其它也行,都一样简单。其次就是,你需要配置好SPI,这个很重要,不然很容易读不出来。
二、配置步骤
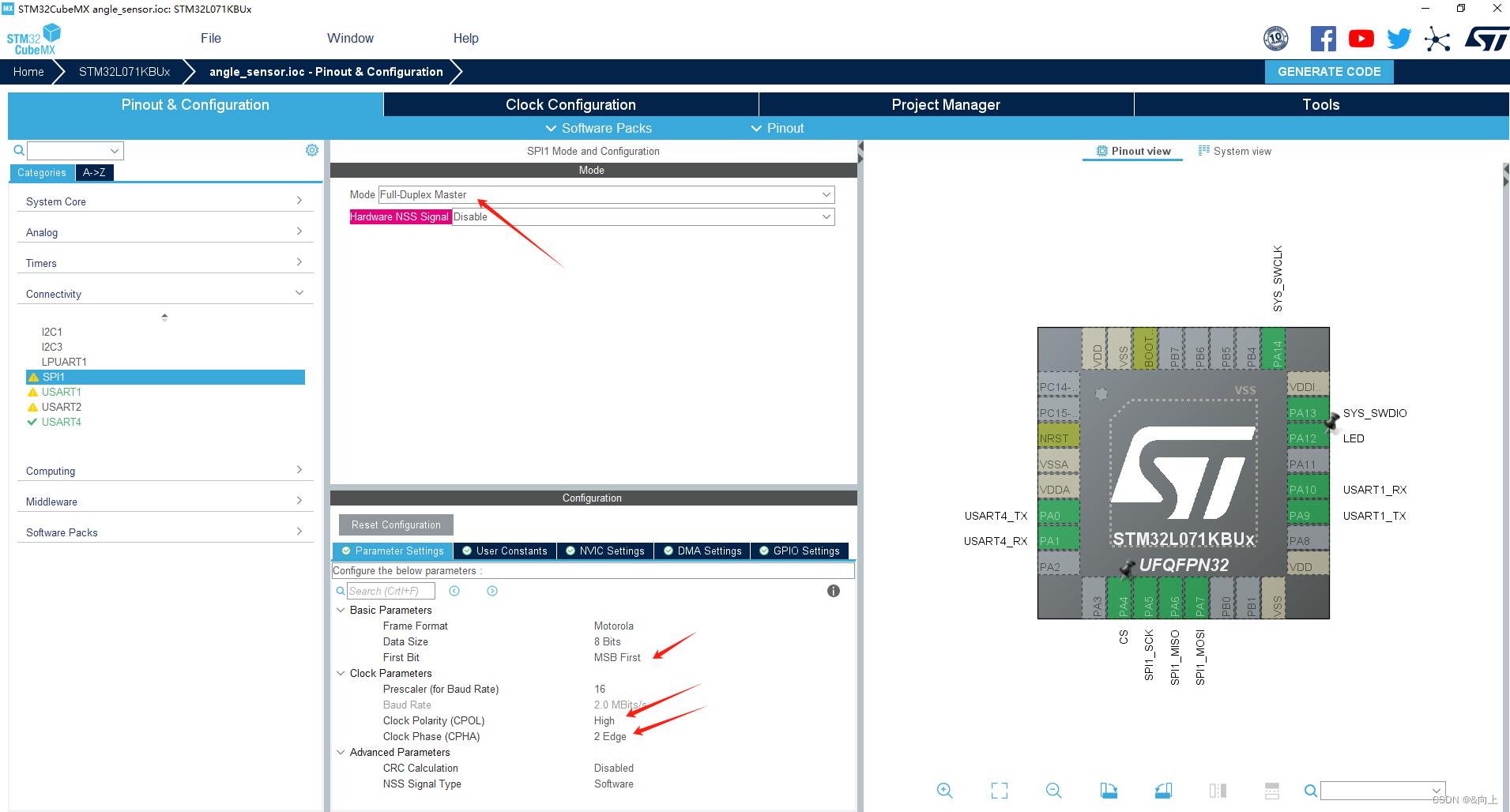
1.配置SPI
注意:通过STM32CUBEMX 来构建代码
static void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi1.Init.CLKPhase = SPI_PHASE_2EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 7;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI1_Init 2 */
/* USER CODE END SPI1_Init 2 */
}
2.引入 LSM驱动库
#include <string.h>
#include <stdio.h>
#include "lsm6dsr_reg.h"
#include "stm32l0xx_hal.h"
#include "main.h"
#define CS_Pin GPIO_PIN_4
#define CS_GPIO_Port GPIOA
#define LED_Pin GPIO_PIN_12
#define LED_GPIO_Port GPIOA
#define BOOT_TIME 10 // ms
#define PI 3.1415926
extern SPI_HandleTypeDef hspi1;
extern UART_HandleTypeDef huart1;
static stmdev_ctx_t dev_ctx;
/* Private variables ---------------------------------------------------------*/
static int16_t data_raw_acceleration[3];
static int16_t data_raw_angular_rate[3];
static int16_t data_raw_temperature;
static float acceleration_mg[3];
static float angular_rate_mdps[3];
static uint8_t whoamI, rst;
static uint8_t tx_buffer[1000];
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp,
uint16_t len);
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp,
uint16_t len);
static void tx_com(uint8_t *tx_buffer, uint16_t len);
static void platform_delay(uint32_t ms);
/* Main Example --------------------------------------------------------------*/
//在主函数里面调用这个接口就行
void lsm6dsr_read_angle_data_polling(void)
{
uint8_t reg;
/* Read output only if new xl value is available */
lsm6dsr_xl_flag_data_ready_get(&dev_ctx, ®);
if (reg)
{
/* Read acceleration field data */
memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t));
lsm6dsr_acceleration_raw_get(&dev_ctx, data_raw_acceleration);
acceleration_mg[0] =
lsm6dsr_from_fs2g_to_mg(data_raw_acceleration[0]);
acceleration_mg[1] =
lsm6dsr_from_fs2g_to_mg(data_raw_acceleration[1]);
acceleration_mg[2] =
lsm6dsr_from_fs2g_to_mg(data_raw_acceleration[2]);
/* 注意:atan算出来的是弧度值, 然后1弧度 = 180/Π */
float angle_x = atan(acceleration_mg[0] / sqrt(acceleration_mg[2] * acceleration_mg[2] + acceleration_mg[1] * acceleration_mg[1])) * 180 / PI;
float angle_y = atan(acceleration_mg[1] / sqrt(acceleration_mg[0] * acceleration_mg[0] + acceleration_mg[2] * acceleration_mg[2])) * 180 / PI;
float angle_z = atan(acceleration_mg[2] / sqrt(acceleration_mg[0] * acceleration_mg[0] + acceleration_mg[1] * acceleration_mg[1])) * 180 / PI;
sprintf((char *)tx_buffer,
"Acceleration [mg]:%4.2f\t%4.2f\t%4.2f\r\n",
acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
//这边是计算出来的角度值
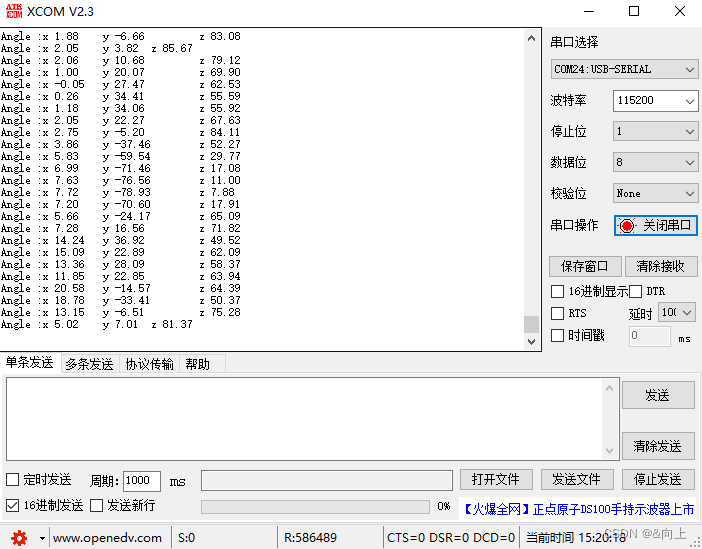
sprintf((char *)tx_buffer,
"Angle :x %4.2f\t y %4.2f\t z %4.2f\r\n",
angle_x, angle_y, angle_z);
tx_com(tx_buffer, strlen((char const *)tx_buffer));
}
// lsm6dsr_gy_flag_data_ready_get(&dev_ctx, ®);
// if (reg)
// {
// /* Read angular rate field data */
// memset(data_raw_angular_rate, 0x00, 3 * sizeof(int16_t));
// lsm6dsr_angular_rate_raw_get(&dev_ctx, data_raw_angular_rate);
// angular_rate_mdps[0] =
// lsm6dsr_from_fs2000dps_to_mdps(data_raw_angular_rate[0]);
// angular_rate_mdps[1] =
// lsm6dsr_from_fs2000dps_to_mdps(data_raw_angular_rate[1]);
// angular_rate_mdps[2] =
// lsm6dsr_from_fs2000dps_to_mdps(data_raw_angular_rate[2]);
// sprintf((char *)tx_buffer,
// "Angular rate [mdps]:%4.2f\t%4.2f\t%4.2f\r\n",
// angular_rate_mdps[0], angular_rate_mdps[1], angular_rate_mdps[2]);
// tx_com(tx_buffer, strlen((char const *)tx_buffer));
// }
platform_delay(1000);
}
/*
* @brief Write generic device register (platform dependent)
*
* @param handle customizable argument. In this examples is used in
* order to select the correct sensor bus handler.
* @param reg register to write
* @param bufp pointer to data to write in register reg
* @param len number of consecutive register to write
*
*/
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp,
uint16_t len)
{
HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(handle, ®, 1, 1000);
HAL_SPI_Transmit(handle, (uint8_t *)bufp, len, 1000);
HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET);
return 0;
}
/*
* @brief Read generic device register (platform dependent)
*
* @param handle customizable argument. In this examples is used in
* order to select the correct sensor bus handler.
* @param reg register to read
* @param bufp pointer to buffer that store the data read
* @param len number of consecutive register to read
*
*/
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp,
uint16_t len)
{
reg |= 0x80;
HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(handle, ®, 1, 1000);
HAL_SPI_Receive(handle, bufp, len, 1000);
HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET);
return 0;
}
/*
* @brief Send buffer to console (platform dependent)
*
* @param tx_buffer buffer to transmit
* @param len number of byte to send
*
*/
static void tx_com(uint8_t *tx_buffer, uint16_t len)
{
HAL_UART_Transmit(&huart1, tx_buffer, len, 1000);
}
/*
* @brief platform specific delay (platform dependent)
*
* @param ms delay in ms
*
*/
static void platform_delay(uint32_t ms)
{
HAL_Delay(ms);
}
/*
* @brief platform specific initialization (platform dependent)
*/
void platform_init(void)
{
/* Initialize mems driver interface */
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.handle = &hspi1;
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
while (1)
{
// 考虑如何喂狗
lsm6dsr_device_id_get(&dev_ctx, &whoamI);
if (whoamI == LSM6DSR_ID)
{
sprintf((char *)tx_buffer,
"Read id :0x%2x\r\n",
whoamI);
tx_com(tx_buffer, strlen((char const *)tx_buffer));
break;
}
platform_delay(BOOT_TIME);
}
/* Restore default configuration */
lsm6dsr_reset_set(&dev_ctx, PROPERTY_ENABLE);
do
{
lsm6dsr_reset_get(&dev_ctx, &rst);
} while (rst);
/* Disable I3C interface */
lsm6dsr_i3c_disable_set(&dev_ctx, LSM6DSR_I3C_DISABLE);
/* Enable Block Data Update */
lsm6dsr_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* Set Output Data Rate */
lsm6dsr_xl_data_rate_set(&dev_ctx, LSM6DSR_XL_ODR_12Hz5);
lsm6dsr_gy_data_rate_set(&dev_ctx, LSM6DSR_GY_ODR_12Hz5);
/* Set full scale */
lsm6dsr_xl_full_scale_set(&dev_ctx, LSM6DSR_2g);
lsm6dsr_gy_full_scale_set(&dev_ctx, LSM6DSR_2000dps);
/* Configure filtering chain(No aux interface)
* Accelerometer - LPF1 + LPF2 path
*/
lsm6dsr_xl_hp_path_on_out_set(&dev_ctx, LSM6DSR_LP_ODR_DIV_100);
lsm6dsr_xl_filter_lp2_set(&dev_ctx, PROPERTY_ENABLE);
}
3.结果
总结
有什么问题,可以评论区里面提一下,看到都会帮忙解决,这个案例只是简单应用,没有涉及复杂的使用过程。

















 3599
3599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









