






智能驾驶产品经理、智能座舱产品经理、车企系统架构、软件开发、仿真测试、车企产品经理、汽车行业AI大模型产品经理干货分享
一款可靠的自动驾驶系统至关重要,而软件与功能之间的连接需要线束来实现,对有汽车血脉之称的线束而言亦面临着严峻的挑战。
自动驾驶的线束工作原理
自动驾驶的主要部件由主控制器ADU、网关、前后摄像头、前后雷达等组成。雷达传感器和摄像头均需使用先进的传感器、执行器,雷达与摄像头可以收集1~200m道路信息传回主控制器,主控制器ADU对雷达和摄像头传输回的数据进行分析计算,计算结果通过网关实现与汽车各系统的交互,从而达到对驾驶员、驾驶车辆、驾驶路面情况信息的全面监控。
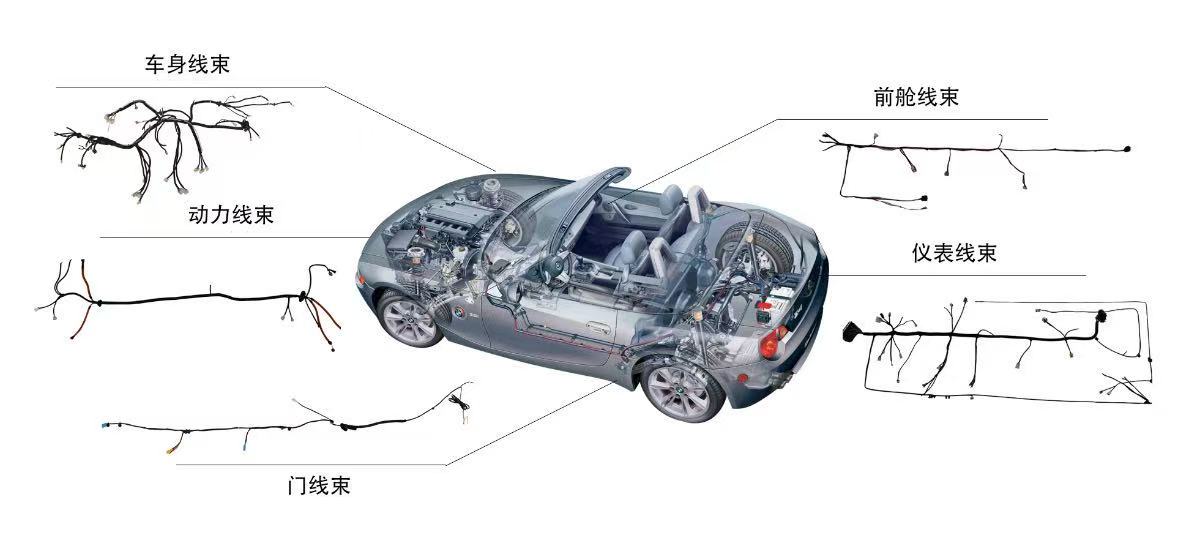
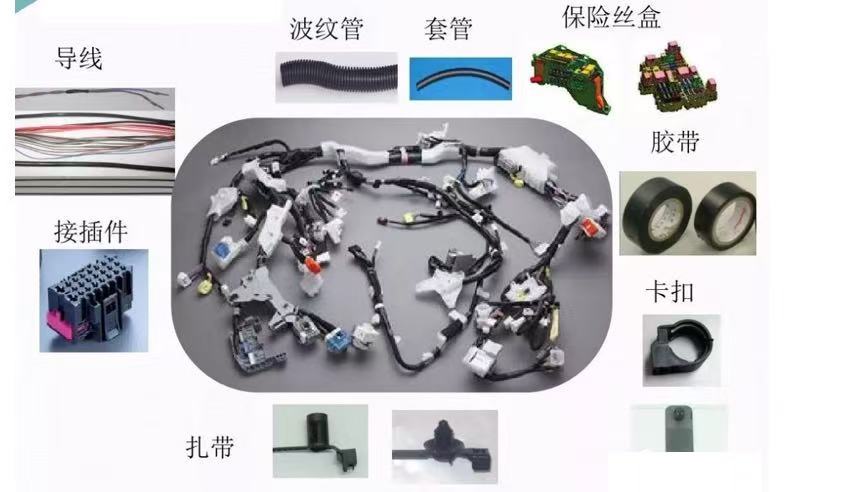
让车辆能够敏锐感知到周围的环境,并自主分析车辆的运行情况以及车辆可能遇到的危险情况,让车辆在运行过程中更加安全,实现安全性与平稳性的双重效应。线束从中起到一个桥梁的作用,其需要把摄像头录制到的信号平稳且快速地传输到主机上,主机计算出结果之后再通过线束快速传输到网关,网关得到结果后把指令通过线束输送到整车控制器,整车控制器得到结果后做出反应,还需要通过线束传递到各个功能件,线束犹如人体血脉一般输送着各种电源和信号。
1) 自动驾驶的电源。
自动驾驶主机的电源通常是KL30+KL15,KL30主要是为各功能件提供电源,KL15为唤醒电源,启动车辆时不能关闭此电源,目前大部分汽车使用的前后雷达为毫米波雷达,毫米波雷达具有穿透力强、技术成熟、成本低的特点,缺点是探测距离较短,无法感知行人,对目标无法细化识别
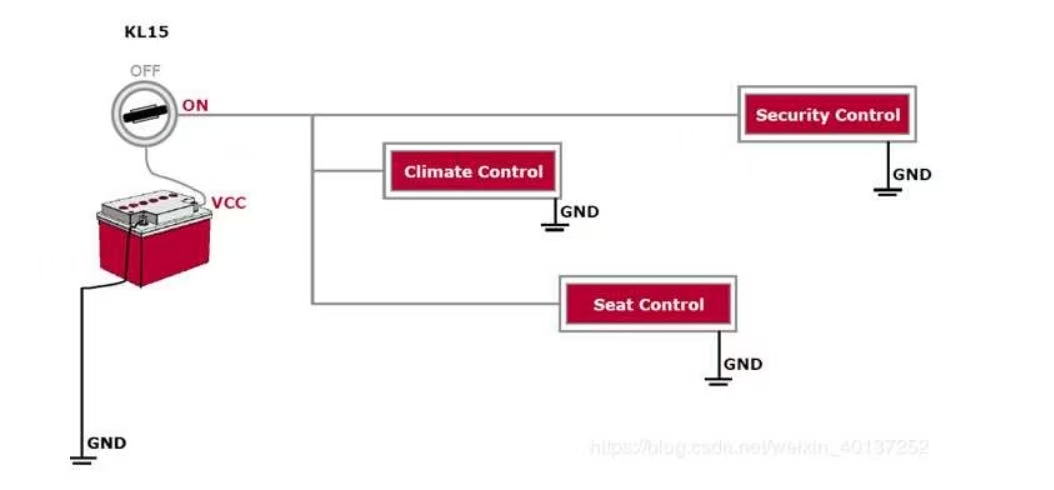
因此毫米波雷达通常使用的是KL15电,既能满足性能要求又能降低静态能耗;而激光雷达是智能驾驶汽车主要动态障碍物检测传感器,其主要特点是探测精度高,受光照影响小,可以用来描绘周围环境参数,亦需要KL30+KL15电源的组合,KL30电可以持续供电,KL15只做唤醒用。其余的摄像头一般均由主机供电。
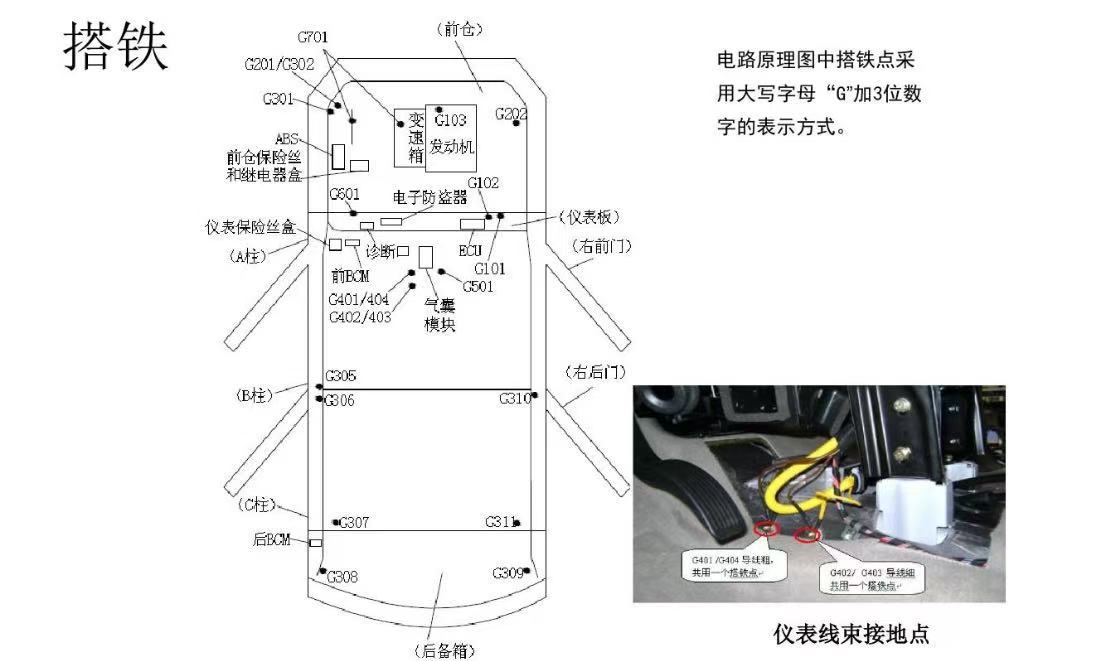
2) 自动驾驶的搭铁。
智能驾驶的搭铁属于重要系统,且易受其他用电器干扰,搭铁点最好能单独设定并离用电设备相对较近,搭铁位置要设置在能够防腐蚀的地方,由于后雷达位置的搭铁点易受污水、灰尘的腐蚀,所以应该通过线束主干把搭铁点设定在舱内的车身上。
3) 自动驾驶的信号线。
自动驾驶的信号传输使用CAN网络进行传输,通常左右雷达上会带有终端电阻,CAN线的终端电阻为120Ω,主机作为CAN线分支,由于分支点不能超过1m,主机与雷达距离较远,不能满足线束的设计需求,因此常常采用对CAN进行绕线的方法进行应对。
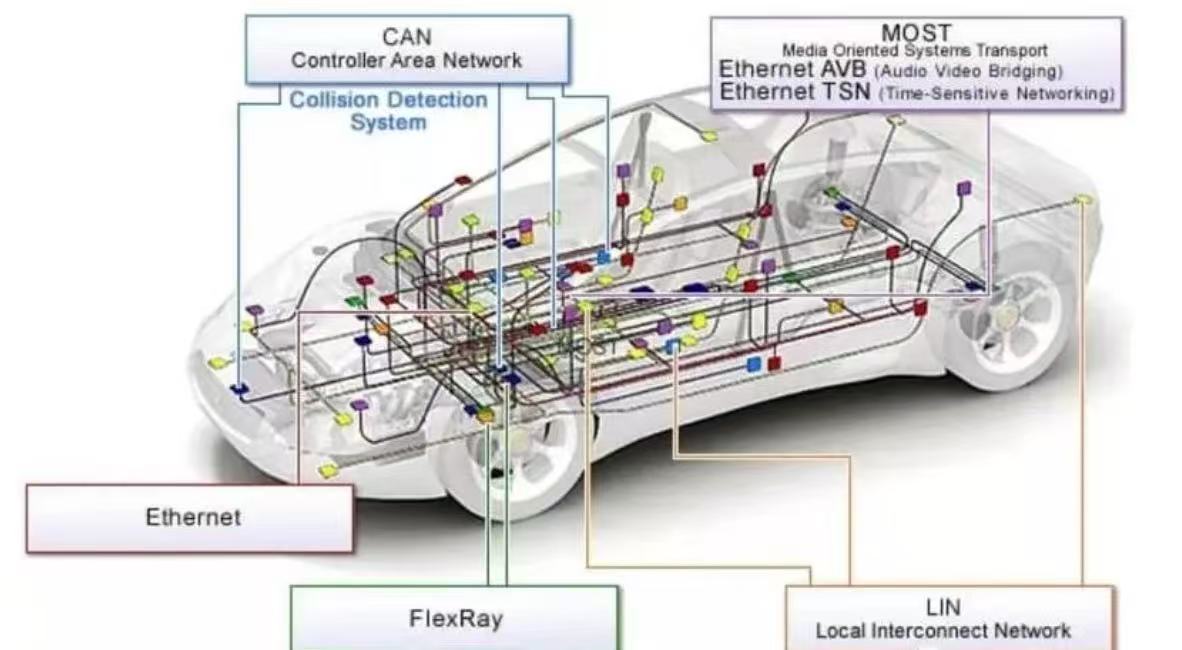
自动驾驶对安全可靠性要求比较高,面对复杂的行驶情况和车内电器情况,信号传输要求也很高,由于传输过程不能受到干扰,因此线束的性能要求显得格外重要。线束需要在保证自身可靠性的前提下屏蔽各方干扰,在材料与工艺上均需提高选择的等级。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









