







本平衡小车系列旨在让基础不是很好的初学者能够进行傻瓜式的从头到尾模仿制作(这些词并不是贬义词,作者自己在做小车时就渴望有这么一篇教程,作者认为,模仿是最好的学习,模仿旨在快速学习基础的知识和基础的应用。)
根据平衡小车的需求,除了电源和电机,我们至少也还需要电机驱动、姿态传感器和MCU这三块主要的模块。
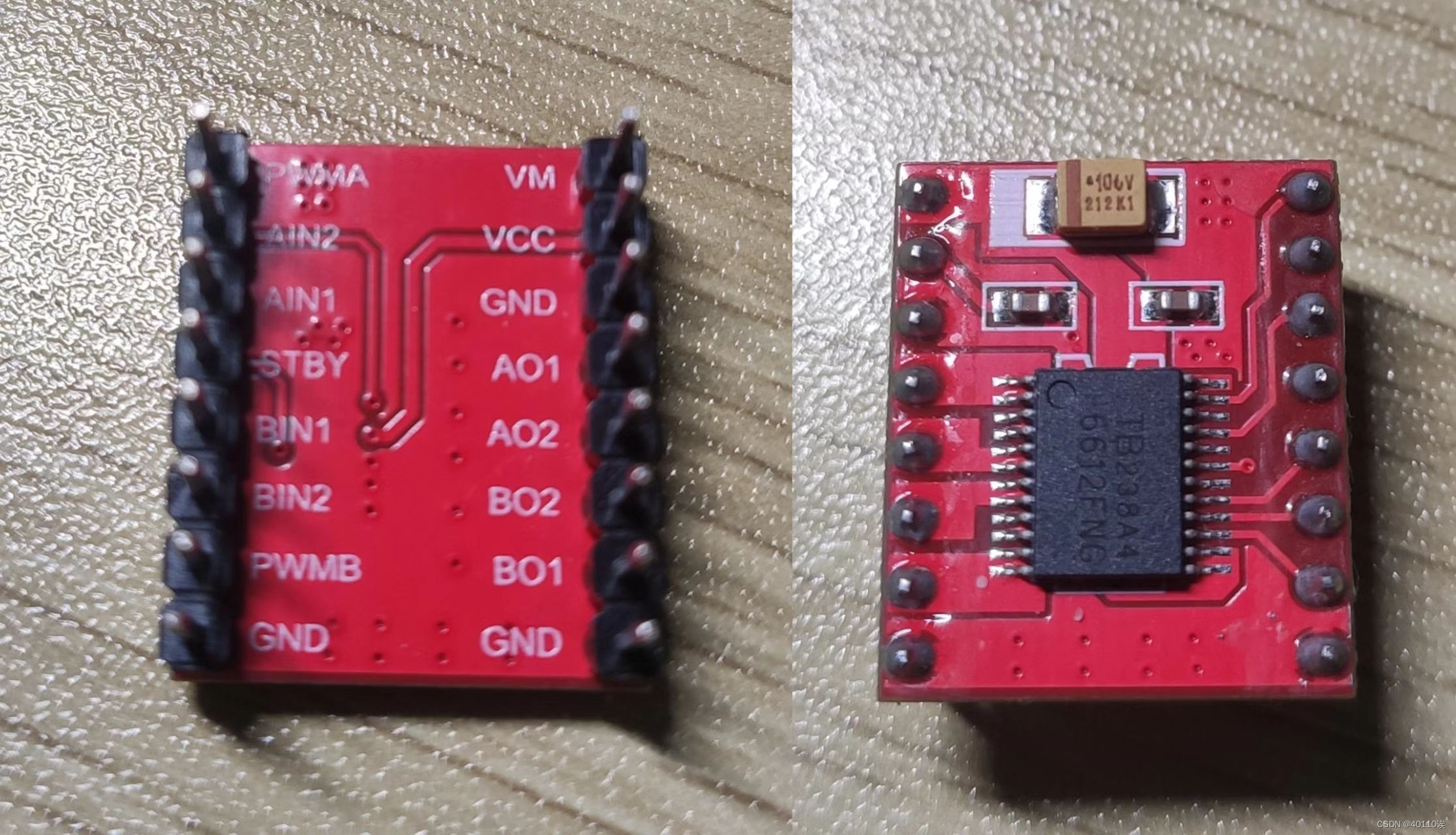
1.电机驱动
电机驱动作者这里选用的是TB6612FNG,体积小,可以独立驱动两路电机。
2.姿态传感器
姿态传感器作者这里选用的是MPU-6050,也就是gy-521模块。
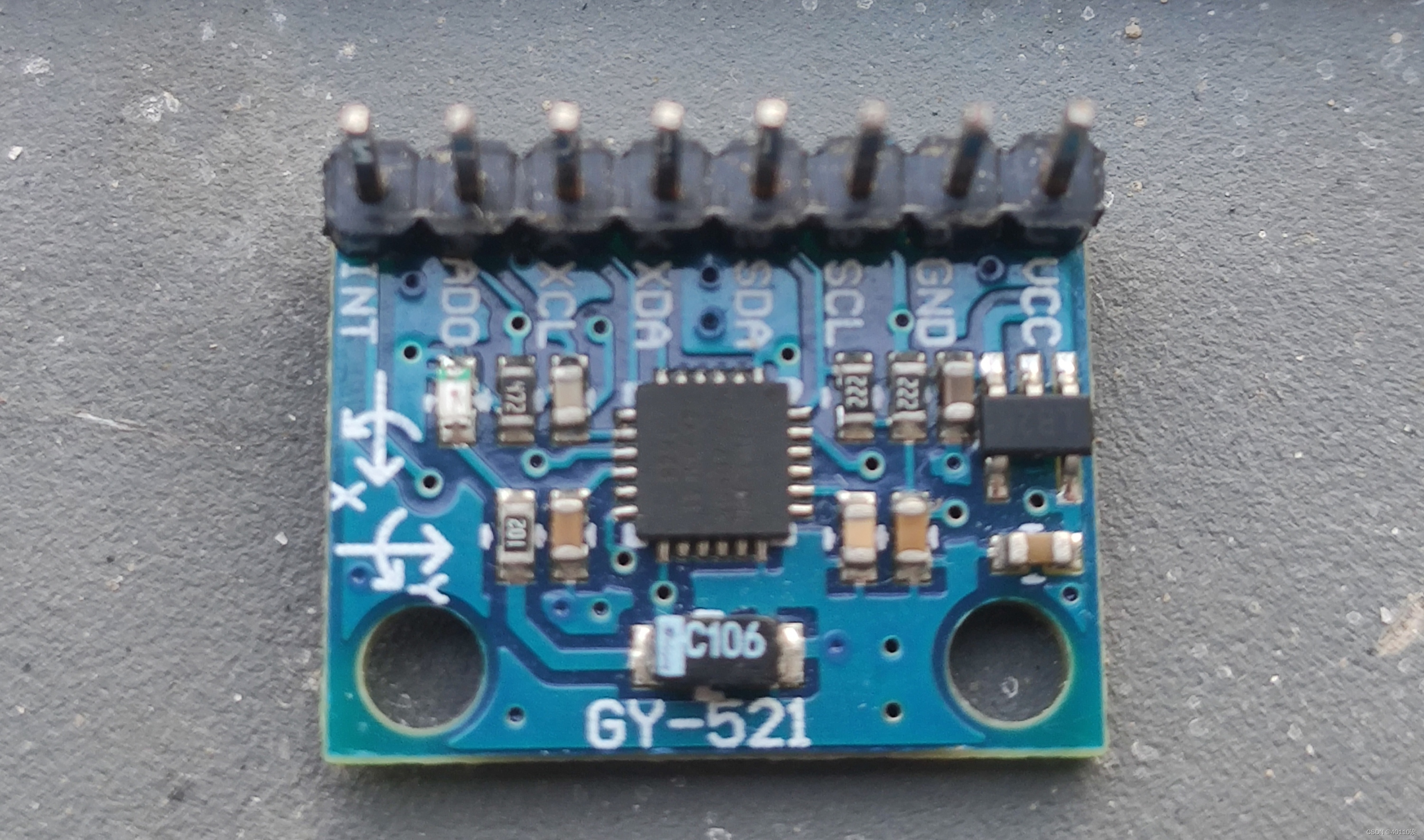
GY-521模块的购置一定要特别注意,有些GY-521模块买回来是有问题的,作者购置过一块GY-521,I2C器件地址读出来也不对,按芯片手册上的说明,根据AD0引脚的高低接法不同,器件地址不是0x68就是0x69,然而作者读出来的却是0x98,但是姿态原始数据也能读出来,就是内置的DMP调用不了,但是本次小车的设计,是用到DMP的,所以GY-521的购置要多多甄别,但是作者也没有啥甄别的办法。
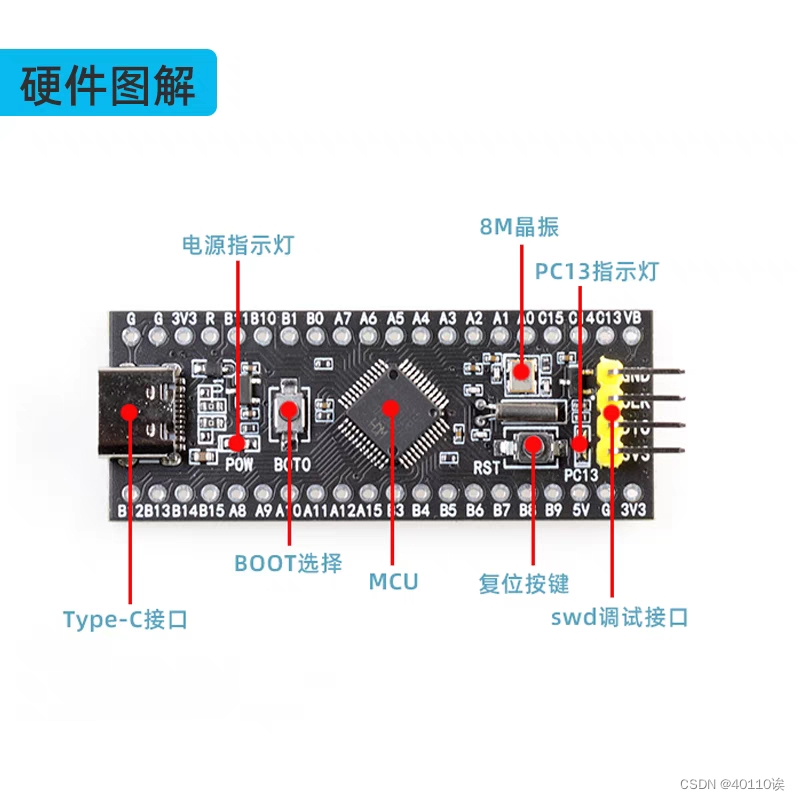
3.MCU
MCU的选择为STM32F103C8T6(C6T6也行),作为小车的主控部分。这里作者建议直接购买其最小系统板,一般来说10块左右就能入手,当然,10块左右的作者也是买到了几块假板,非常难受。作者这里推荐一下绿深旗舰店里的C8T6(买了两块都没啥问题,不够好像有不少差评hhh),还是C口供电,当然不支持USB烧录程序,烧录程序需要额外再买一个USB转串口模块或者ST-Link。
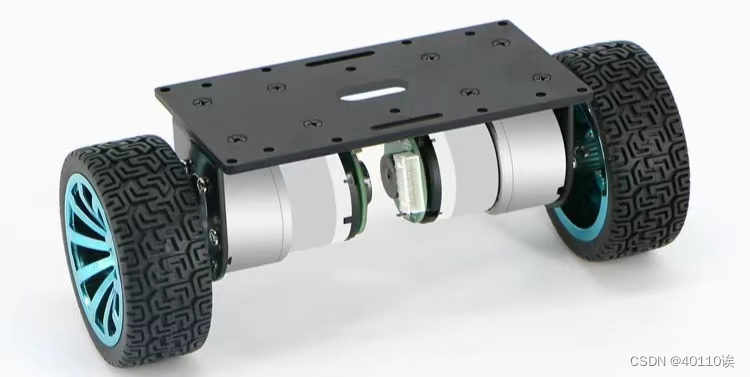
4.电源和电机
电源的选择需要看电机的参数。这里作者选择的是12V带霍尔编码器的直流步进电机,轮趣公司(也就是以前的平衡小车之家)他们家的。选择了12V的电机,作者也就直接上了个12.6V的锂电池,再加上12转5V和5V转3.3V的电压转换电路,这就可以给小车上的各个模块供电了。

5.附加配件
以上的模块组合,基本可以实现小车的直立平衡,但是为了给小车的调试带来方便,这里作者给小车加上了一块OLED和蓝牙模块。
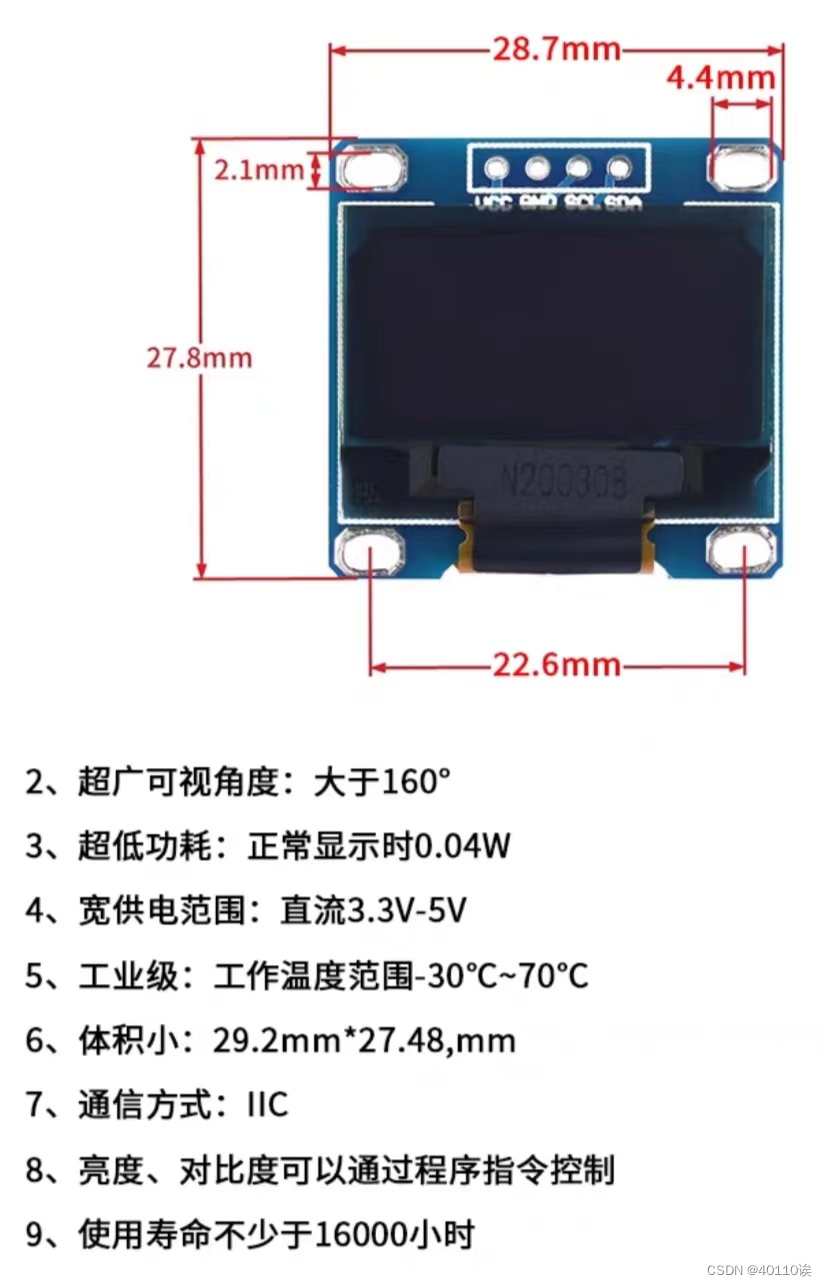
OLED屏幕作者选择的是中景园的0.96寸的12864(I2C通信),非常常见的显示模块,购买了之后,店家一般都会给驱动代码,用起来十分的快捷。OLED在小车调试时显示有些调试参数,可以使调试过程更加的方便舒服。
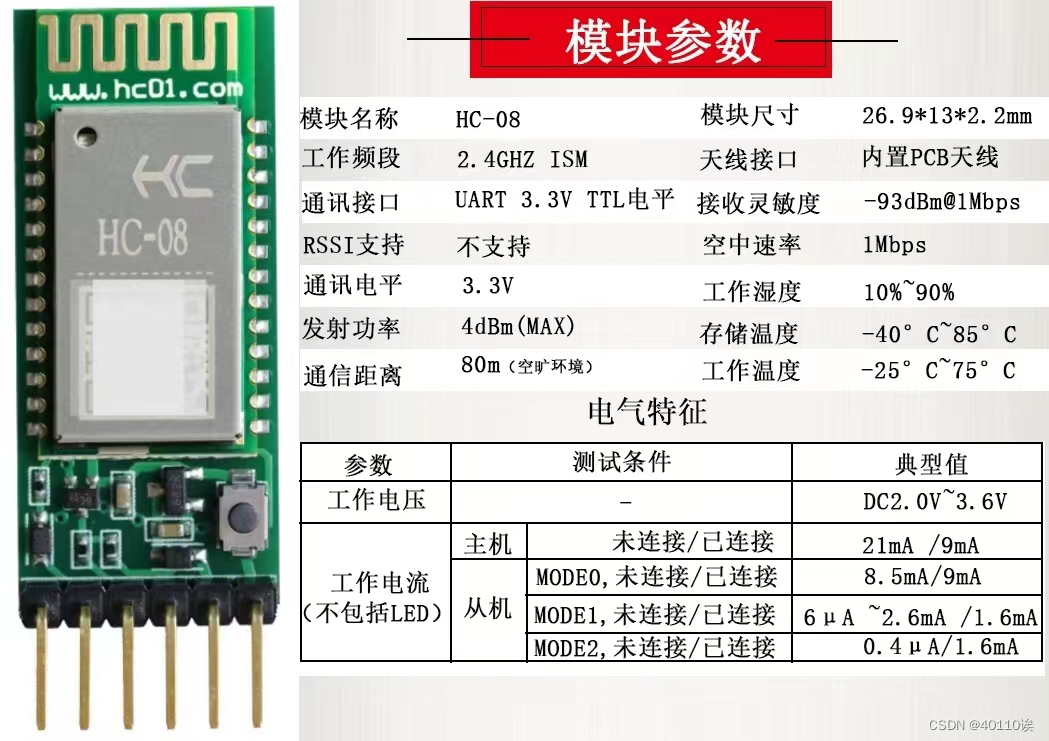
蓝牙模块作者选用的是HC-08,物美价廉,汇承的初学者套餐真不错hhh。
6.总结
各功能模块都选取好了,就需要一块底板来承载这些模块,大家可以选择在立创EDA上进行底板的绘制,立创上打样还免费,太爱了。下面是作者设计的底板,非常简单hhh。
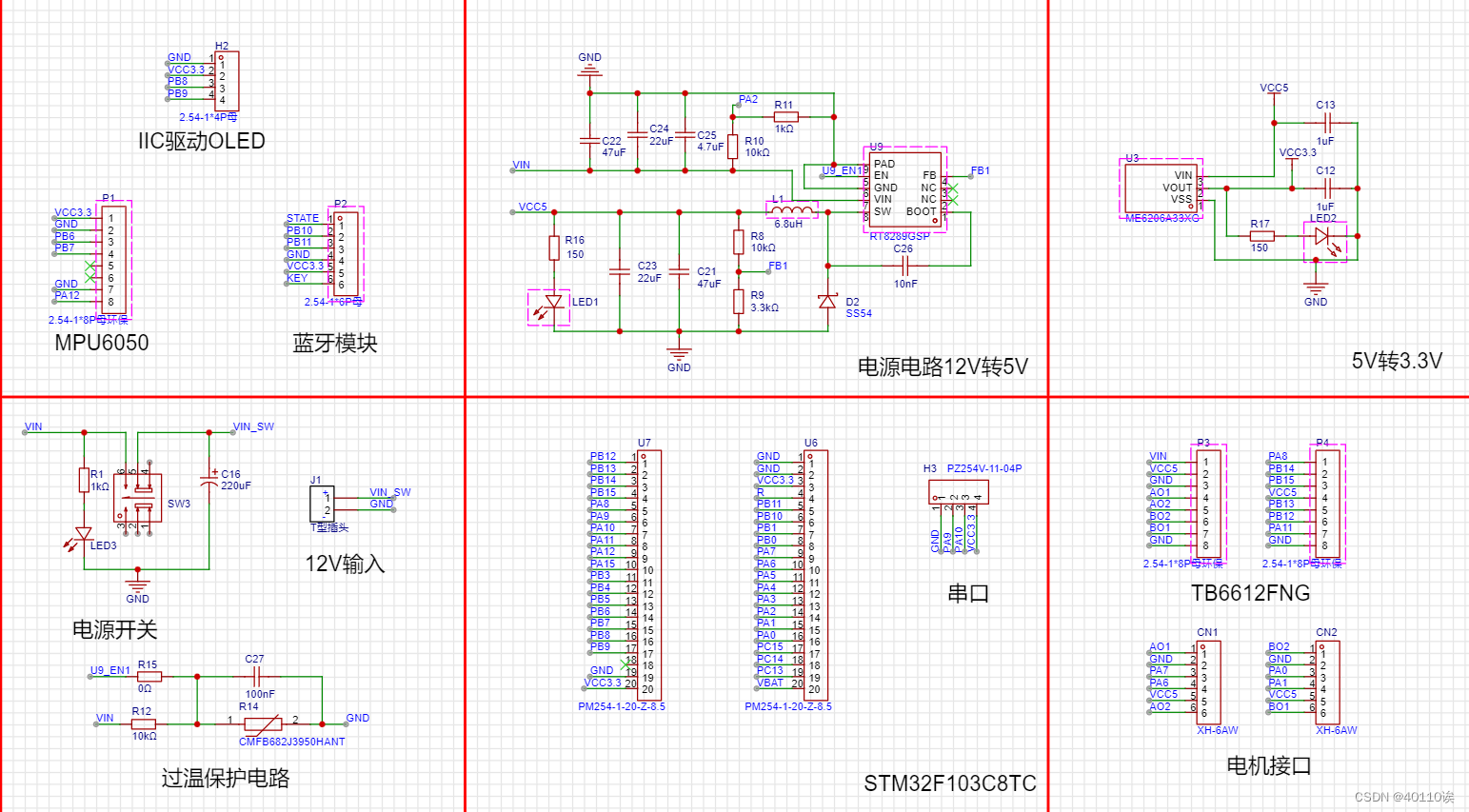
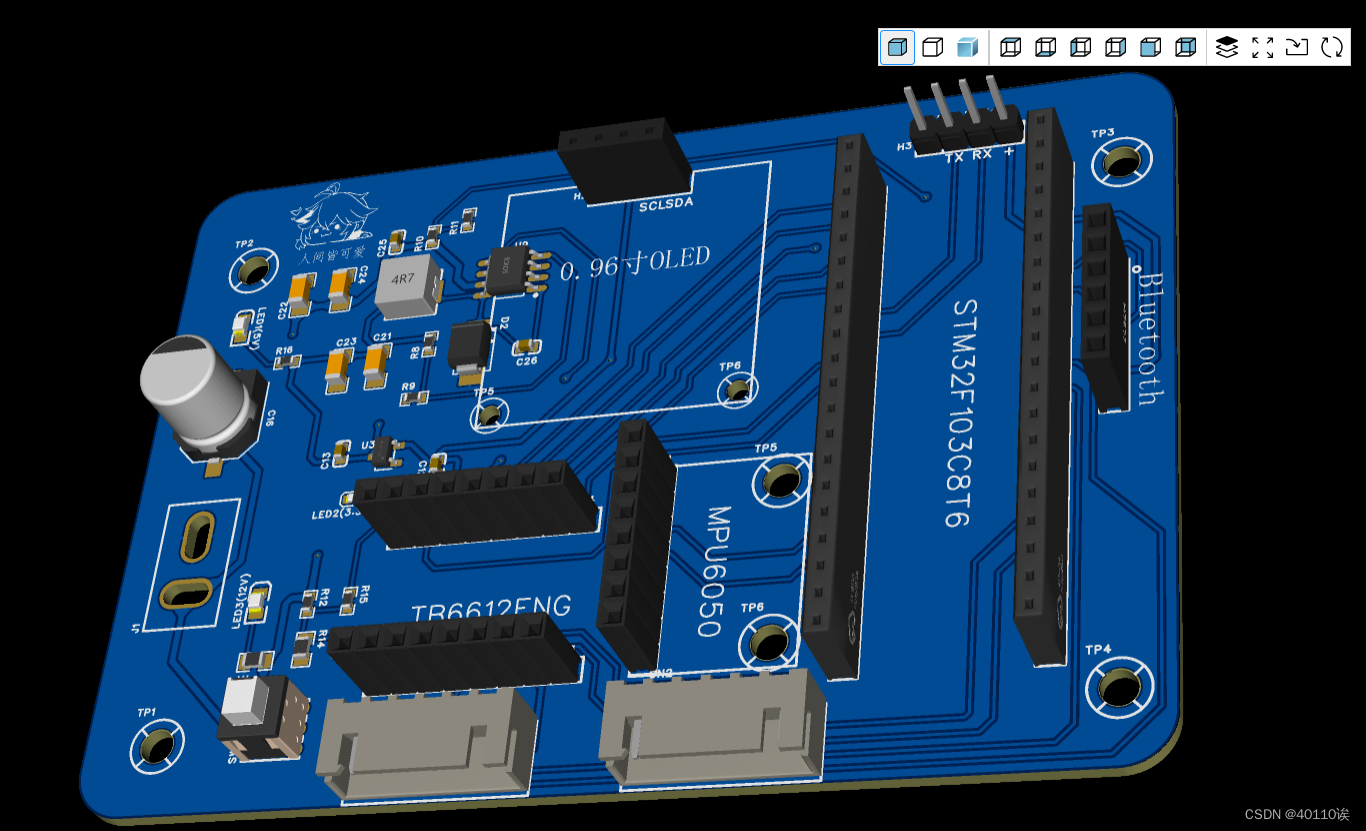
当然,最终的底板和上面还是略有些不一样的hhh,需要作者的PCB工程,可以私信我或者在评论区留下你的邮箱。
以上就是器件选型的所有内容了,大家还可以在此基础上加上一些其他的功能模块,让小车拥有更多的功能,比如超声波模块,循迹模块等等。















 3117
3117











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









