






首先我们说下CogCalibNPointToNPointTool这个工具如何使用:它是一个平面坐标转换的工具,无论是机器人还是其它设备他们在运动时是基于自己的一个坐标空间系进行的,要想让它运动到某个位置必须要告诉他基于自已空间坐标系的坐标,可以通过CCD对目标位置拍照,拍照后因为在VisionPro软件里看到的是像素坐标,需要通过CogCalibNPointToNPointTool这个工具转换成机器人的坐标。
在目标位置找N(n>3)个目标点位 一般区域小可以用工具棋盘格 标记点位置,然后通过机械设备去运动到对应的点位记录下坐标再输入到CogCalibNPointToNPointTool工具中 步骤如下:
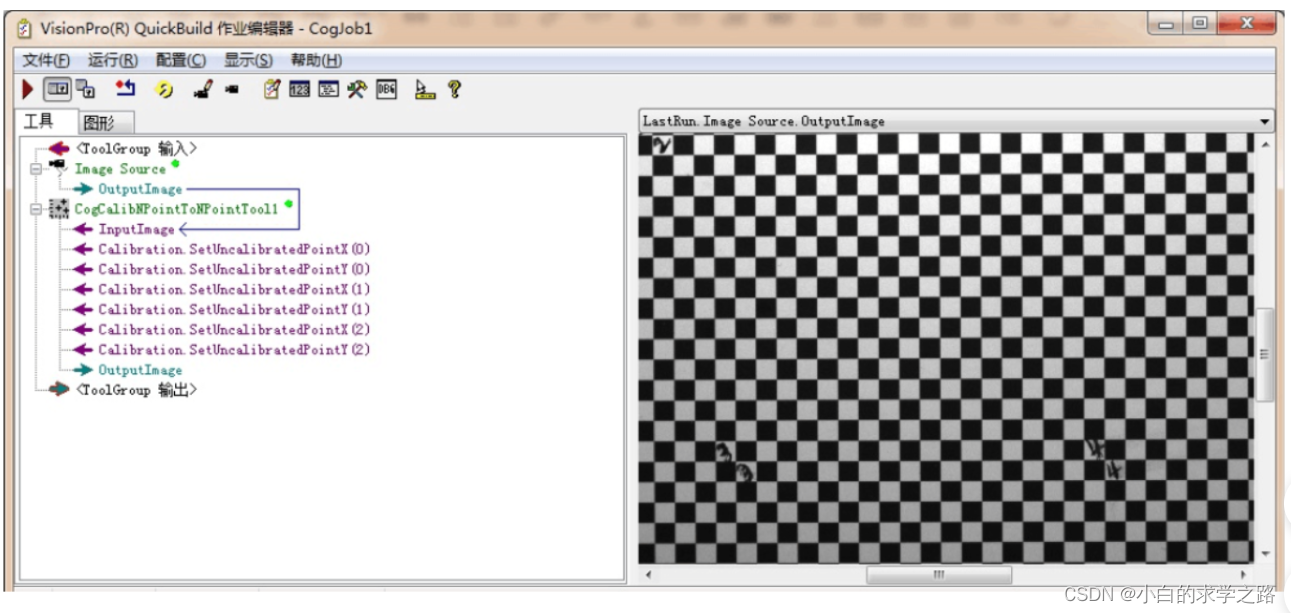
1.先新建一个CoaCalibNPointToNPointTool工具,再用VP软件对棋盘格拍照,点击运行按钮把拍照图片传进工具中
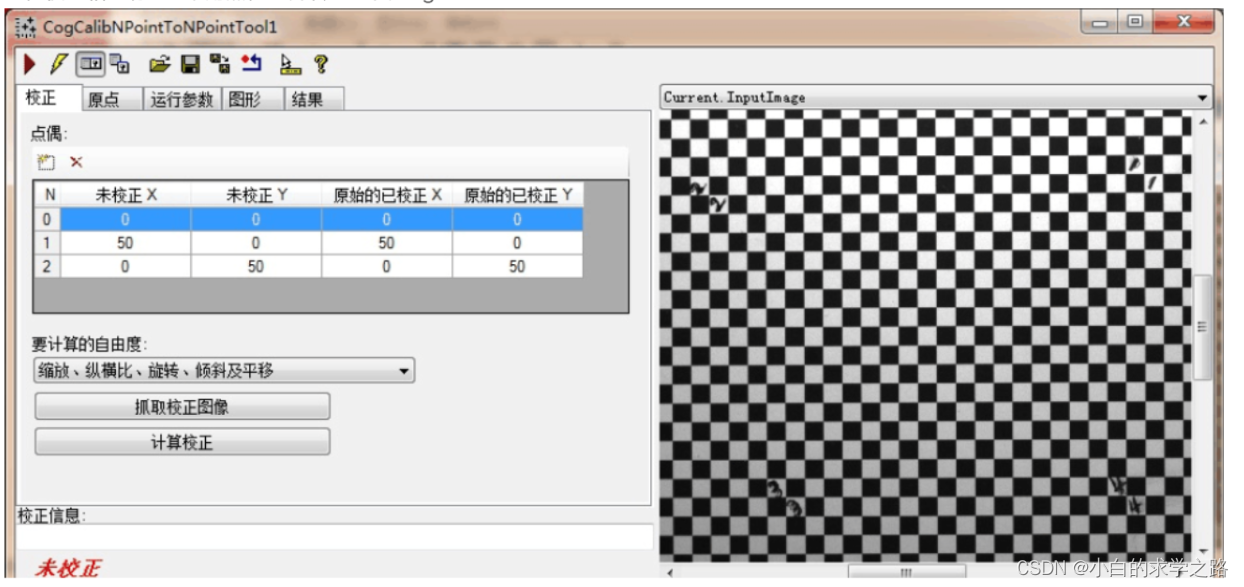
2在棋盘格上标记4个角点位置并传进工具CogCalibNPointToNPointTool里
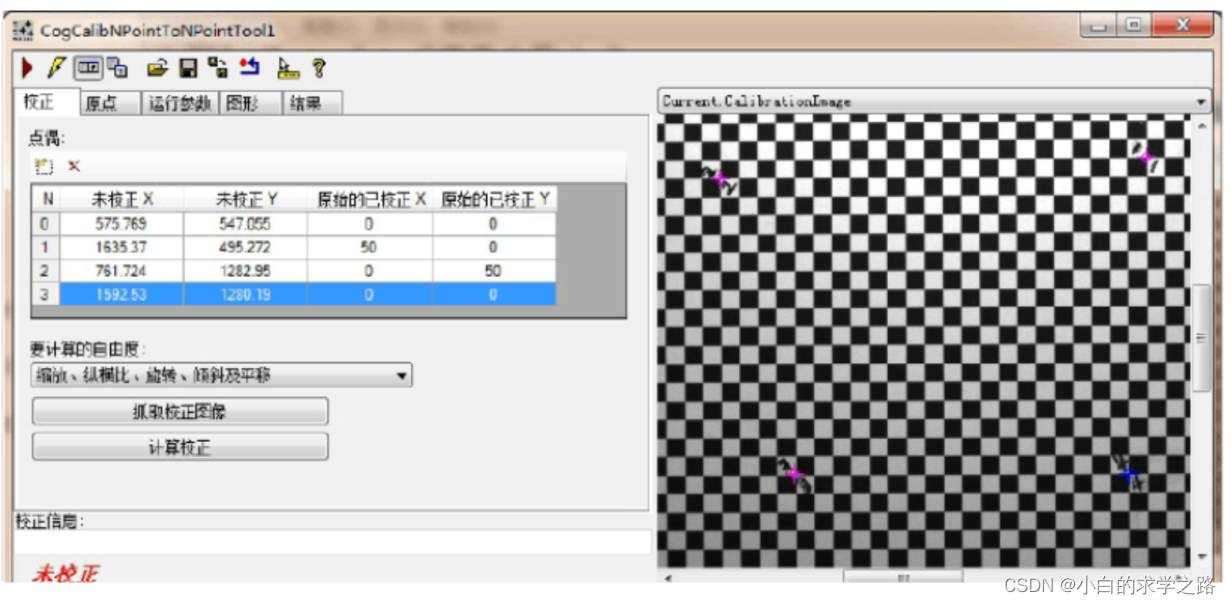
3在右边图的下拉选项切换到 Current.Calibrationlmage
在工具里点击“抓取校正图像”按钮然后通过调整未校正X和未校正Y的数值
大小或者鼠标去拖动蓝/紫色标记到棋盘格标记的角点位置
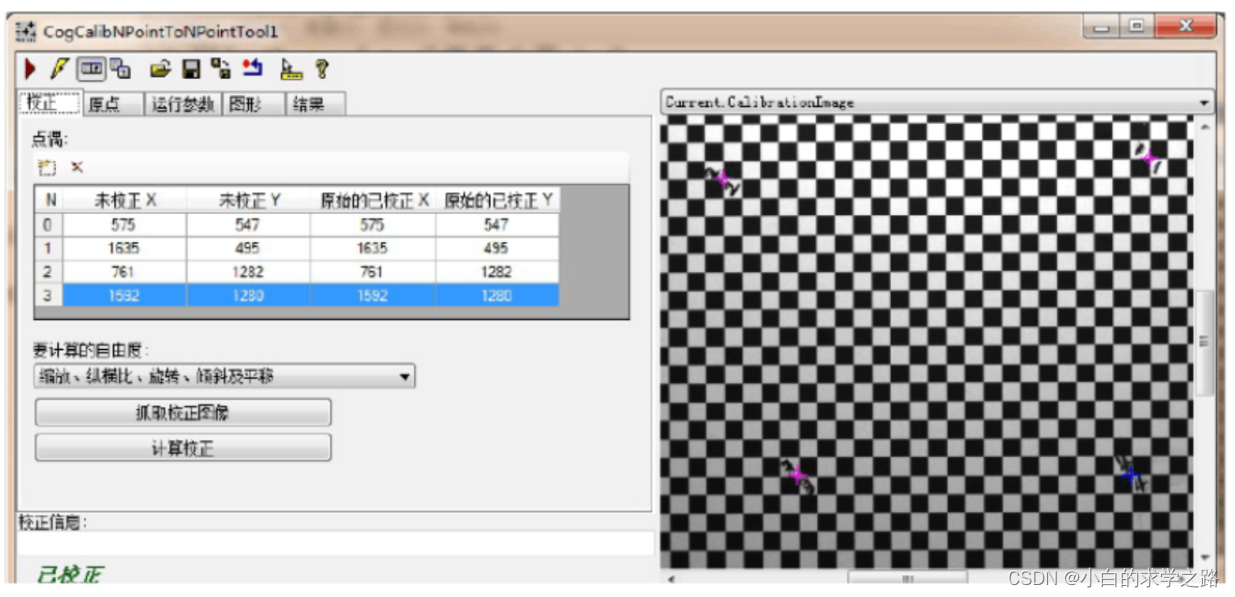
4.再用机械设备来走这几个点开输入对应到原始的已校正X和原始的已校正Y中去,点击计算校正便完成了平面坐标的转换,点击红色三角
形运行按钮输出的图片的坐标系便是转换后的机械设备坐标系















 515
515











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









