






5G标准学习笔记07 NR定位(Positioning)概述
前言
现在孬孬学习并介绍的主要是3GPP针对AI/ML在NR空中接口的应用定义了三个主要的用例(use cases),主要是参考的TR38.843来进行学习的。对于之前的两个case:CSI反馈和波束管理,多少在平时课题研究中都有所了解,但是对应第三个case的定位精度增强(Positioning accuracy enhancement)之前是没有涉及了解的,所以对应这个case,要先初步了解NR定位技术,所以本文孬孬就带着大家一起,对应NR定位现有一个大致的了解。
一、NR定位简介
1、NR定位定义
NR定位:是指基于5G NR空中接口,通过发送和测量特定的参考信号(如定位参考信号PRS、同步信号块SSB、探测参考信号SRS等),结合时间、角度、信号强度等测量数据,计算UE或其他设备在二维(水平)或三维(水平+垂直)空间中的位置。NR定位可以由网络侧(gNB或定位服务器)、UE侧或两者协作完成,旨在满足从米级到厘米级的定位精度需求。
2、NR定位目标和应用场景
(1) 目标
高精度定位:支持米级(室外)、亚米级(室内)、厘米级(工业/V2X)精度。
低延迟:满足实时应用(如自动驾驶、AR/VR)的毫秒级需求。
广覆盖:支持室内外混合场景,覆盖城市、农村、工厂等。
低功耗:为物联网设备提供高效定位,延长电池寿命。
可扩展性:支持大规模设备(如智能城市中的传感器网络)。
复杂环境适应性:克服多径、NLOS、高移动性等挑战。
(2)应用场景
工业物联网(IIoT):
精确跟踪工厂内机器人、设备或物料,精度要求厘米级。
示例:自动化导航、资产管理。
车联网(V2X):
支持自动驾驶和协同驾驶,精度要求厘米级,延迟<20ms。
示例:车道级导航、碰撞避免。
室内导航:
在商场、机场等场所提供亚米级定位。
示例:消费者导航、医疗设备定位。
公共安全:
快速定位紧急呼叫者(如E911),精度要求米级。
示例:消防救援、执法追踪。
无人机与航空:
为无人机提供三维定位,精度要求米级。
示例:物流配送、空中监控。
增强现实(AR)/虚拟现实(VR):
支持沉浸式体验,精度要求厘米级,延迟<20ms。
示例:AR导航、多人VR游戏。
智能城市:
定位车辆、行人或传感器,优化交通和基础设施管理。
示例:信号灯控制、共享出行。
物流与供应链:
定位货物或车辆,精度要求亚米级。
示例:仓库管理、冷链监控。
二、传统定位方法
1、基于时间的定位方法
基于时间的定位方法利用信号传播时间或时间差来估计UE与基站(gNB)之间的距离或位置,依赖高精度时间测量和参考信号(如PRS、SRS)。
(1)TDoA(Time Difference of Arrival,到达时间差)
原理:
UE测量来自多个基站的定位参考信号(PRS)的到达时间差,称为参考信号时间差(RSTD)。
RSTD定义为:

每个RSTD对应一条双曲线,多条双曲线的交点通过几何三角测量(Hyperbolic Positioning)确定UE位置。需要至少3个基站(2个RSTD)进行2D定位,4个基站进行3D定位。
测量流程:
①gNB周期性或按需发送PRS。
②UE测量各PRS的到达时间,计算RSTD。
③UE报告RSTD或直接计算位置。
(2)ToA(Time of Arrival,到达时间)
1.2 ToA(Time of Arrival,到达时间)
原理:
UE测量PRS从基站到UE的绝对传播时间(ToA),通过传播速度(光速)计算距离:

多个基站的ToA测量通过三边测量(Trilateration)计算UE位置,每条ToA对应一个以基站为中心的圆。
测量流程:
①gNB发送PRS,UE测量到达时间。
②UE报告ToA或计算距离。
③LMF或UE使用多基站ToA数据定位。
(3)RTT(Round-Trip Time,往返时间)
原理:
测量信号从发送端到接收端再返回的往返时间,计算距离:
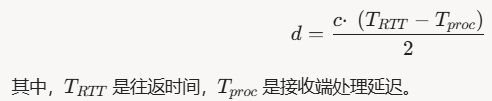
多基站RTT通过三边测量定位。
测量流程:
①gNB发送PRS,UE测量Rx-Tx时间差。
②UE发送SRS,gNB测量Rx-Tx时间差。
③LMF或UE计算RTT和位置。
2、基于角度的定位方法
基于角度的定位方法利用NR的Massive MIMO技术,通过测量信号的到达或离开角度,结合基站位置计算UE位置。
(1)AoA(Angle of Arrival,到达角度)
原理:
gNB通过Massive MIMO天线阵列测量上行信号(如SRS)的到达角度(水平角和垂直角)。
结合gNB位置,通过三角测量定位UE。
AoA基于信号的相位差或波束方向估计。
测量流程:
①UE发送SRS,gNB接收信号。
②gNB估计AoA。
③LMF结合多基站AoA数据定位。
(2)AoD(Angle of Departure,离开角度)
原理:
UE测量下行信号(如PRS、CSI-RS)的离开角度(相对于gNB天线阵列)。
结合gNB位置和天线配置,计算UE位置。
AoD通常通过波束索引推断。
测量流程:
①gNB发送PRS/CSI-RS(多波束)。
②UE测量最佳波束,估计AoD。
③UE或LMF计算位置。
3、基于信号强度的定位方法
基于信号强度的定位通过测量信号强度(Received Signal Strength Indicator,RSSI),结合路径损耗模型估计距离。
原理:
UE或gNB测量信号(如PRS、SSB、CSI-RS)的强度(dBm)。
通过路径损耗模型估计距离:

多基站距离通过三边测量定位。
测量流程:
①UE或gNB测量RSSI。
②应用路径损耗模型估计距离。
③LMF或UE计算位置。
4、混合定位方法
混合定位融合多种测量数据(如TDoA、AoA、RSSI、RTT),通过高级算法提高精度和鲁棒性。
原理:
收集多维(时间,空间,信号质量)测量数据(RSTD、AoA、RSSI等)。
使用融合算法(如卡尔曼滤波、粒子滤波、最小二乘法、贝叶斯估计)综合处理,输出最优位置。
可融合辅助数据(如IMU、GNSS、地图)。
测量流程:
①UE和gNB测量多种信号特性。
②数据通过LPP/RRC传输到LMF或UE。
总结
以上就是对NR定位技术的基本学习,后面会介绍利用AI/ML技术进一步提升性能,解决复杂环境挑战。

















 629
629

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









