







一、运动控制常用名词
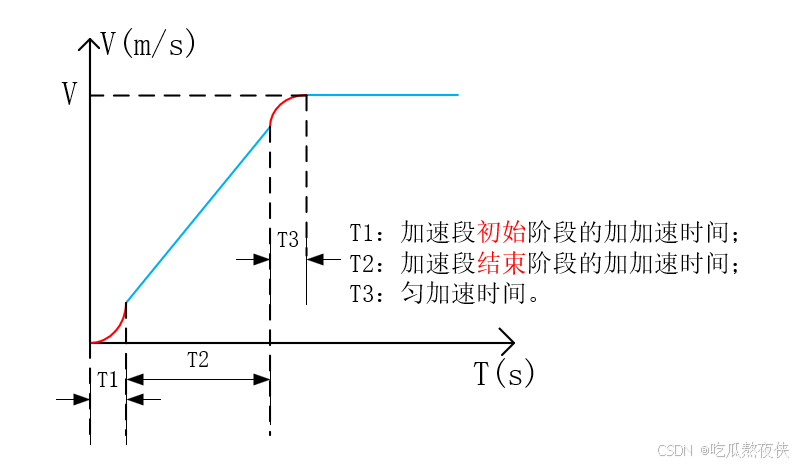
1、速度、加速度、加加速度
| 线性轴 | 旋转轴 | |
|---|---|---|
| 速度 位移的变化率 | 线速度V:m/min、m/s | *转速n:rpm(每分钟多少转)、r/s *角转速度ω:rad/min、rad/s ω=2Πn,ω=v/r(r为旋转半径) |
| 加速度 速度的变化率 | 线加速度a:m/s² a=Δv/Δt | 角加速度α:rad/s² α=Δω/Δt |
| 加加速度 加速度的变化率 | 线加加速度Jerk:m/s*s²(s的三次方) Jerk=Δa/Δt | 角加加速度Jerk:rad/s²*s Jerk=Δα/Δt |
当电机启动特别硬的时候,可以加一段加加速度时间,启动和停止会平稳很多,不至于电机电流瞬间增大。
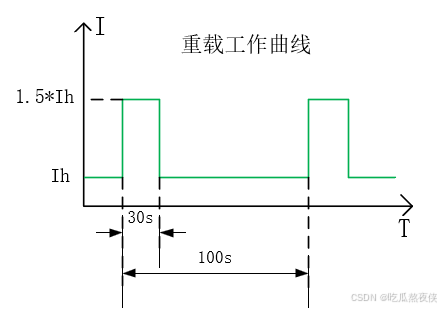
2、额定电流、堵转电流、重载电流、最大电流
| 额定电流Ie | 长期连续工作在额定速度以及额定力矩下,所对应的最大电流。 |
|---|---|
| 重载电流Ih | 重载工作曲线下的工作电流,即100s为一个工作循环,30s工作在1.5倍重载电流1.5*Ih,70s工作在重载电流Ih。
|
| 堵转电流Io | 长期连续工作在零速及堵转力矩下,所对应的最大电流。 *堵转电流为电机在运行过程中因为某种原因无法正常转动时,电流急剧增大的现象。堵转时的电流最高可达额定电流7倍,时间稍长就会烧坏电机。(一般产生的原因为机械故障或负载过大) |
| 最大电流Imax | 工作时能承受或被允许的最大电流。 |
3、额定力矩、堵转力矩、最大力矩
| 额定力矩Me | 电机长期连续工作在额定速度所对应的力矩,与额定电流相对应。 |
|---|---|
| 堵转力矩Mo | 电机长期连续堵转时的最大工作力矩,与堵转电流相对应 |
| 最大力矩M max | 电机工作时能承受或被允许的最大力矩,与其最大电流Imax相对应。 (*电机的过载能力要比变频器的过载能力要强,选变频器的时候,变频器的过载电流要大于给电机提供最大力矩的过载电流) |
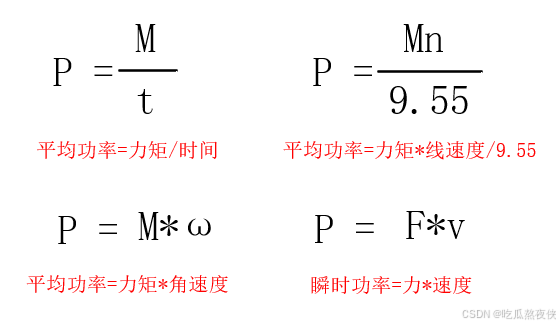
4、额定功率、最大功率
| 额定功率Pe | 电机长期连续工作在额定速度及额定力矩下,所对应的功率。 |
|---|---|
| 最大功率P max | 电机工作时能承受或被允许的最大功率。 |
5、转动惯量
| 惯量 |
|
|---|---|
| 转动惯量 |
|
| 转动惯量的计算 | 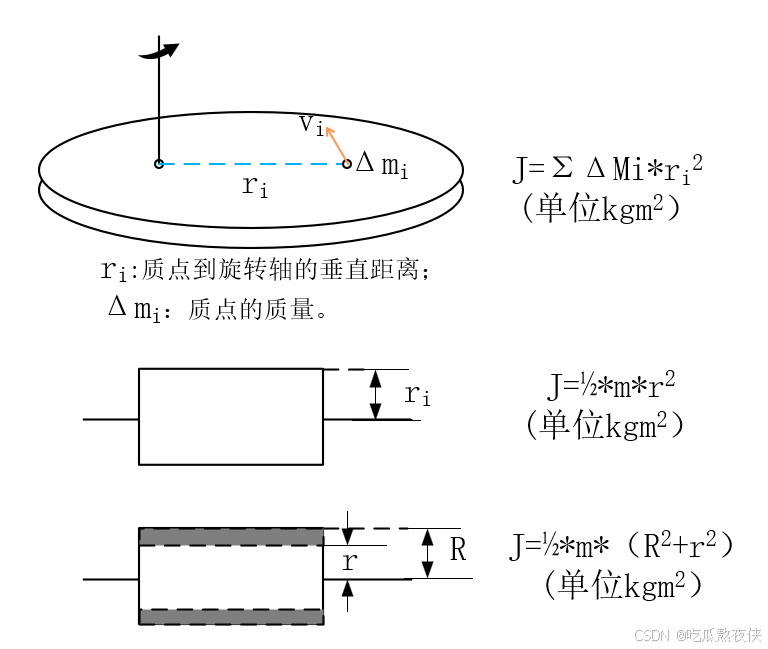 |
*电机、逆变单元、整流单元的选型
6、齿轮比(传动比)
在生产机械设备中,为了提高电机的驱动能力或提高速度精度及定位精度,常常在电机和负载之间加一个降速齿轮箱或传动机构,相反,也可以在电机和负载之间加一个升速传动机构。
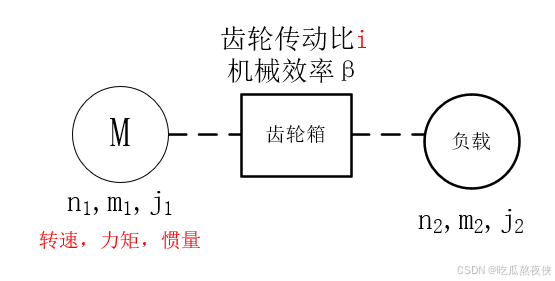
| i=n1/n2 | 当i>1时(n1>n2,电机转速>负载转速),降速⬇; 反之升速。 |
|---|---|
| M1=M2 /(i*β) | 当i>1时,M1<M2(电机力矩小于负载力矩),提高电机的驱动能力。 |
| J1=J2 / i² | 当i>1时,J1<J2(电机惯量<负载惯量),并与i²成比例,利用降速传动比来降低负载惯量的影响。 |
*齿轮比(传动比)的应用
| (1)、提高速度系统的精度及定位精度 | 比如i=10,n1/n2=10,即电机转10圈,负载转1圈;如果电机的速度精度是0.1rpm,则负载的速度精度就是0.01rpm。 |
|---|---|
| (2)、增大力矩 | 比如i=10,m2=10*m1(不考虑β影响);即电机在负载端的力矩是电机力矩的10倍,相当于电机的力矩将增大10倍。 |
| (3)、选择合适的齿轮比 | 降速齿轮比越大,速度及定位精度越高,电机的驱动能力越大,但其力矩精度将降低,需要平衡它们之间的关系; 在力矩控制情况下,要慎重增大降速齿轮比i,否则会影响力矩精度(比如卷曲时的间接张力控制等)。 |
7、摩擦力矩(摩擦转矩)
在一些特殊运动控制中(卷曲的间接张力控制等),为了提高张力控制精度,常常增加摩擦力矩补偿,能够有效的抵消电机本身及机械传动机构等引起的摩擦阻力。
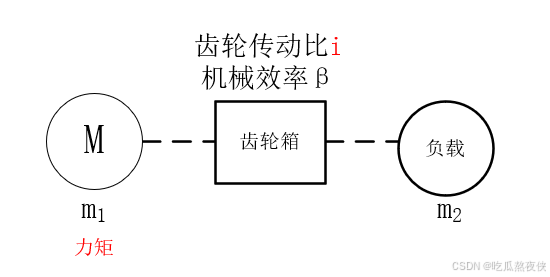
由图可知,电机产生的力矩M1要传递到负载侧,要经过电机轴、机械传动机构、负载机构,在传递的过程中,需要有损耗一部分力矩,这部分力矩常会称之为“摩擦力矩”;
由于电机产生的力矩并没有完全作用在负载上,所以在一些对力矩控制精度比较高的场合,且没有力矩实际检测的力矩开环控制下,需要进行一些力矩补偿,称为“摩擦力补偿”。
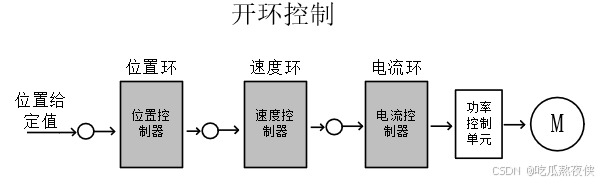
8、开环/闭环控制
| 开环 | 没有实际值测量装置,或测得的实际数值没有参与控制。
|
|---|---|
| 闭环 | 有实际测量装置,测得的实际值参与控制。
|
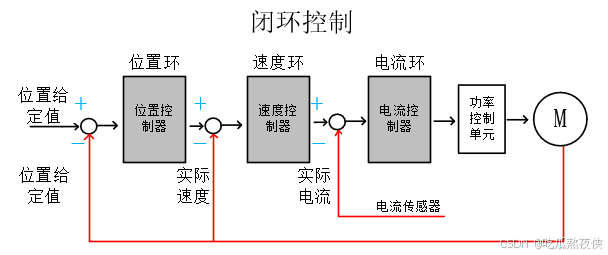
9、速度、力矩前馈
在运动控制中,为了提高系统的动态响应或跟随能力,经常会激活速度前馈及力矩前馈。速度前馈能提高系统的位置跟随能力,而力矩前馈则会提高系统的速度跟随能力。
| 速度前馈 | 在进行定位控制中,直接将速度的设定值跳过位置环,直接叠加到速度设定通道。 |
|---|---|
| 力矩前馈 | 将加减速过程中的动态力矩,跳过速度环,直接叠加到电流环。 |
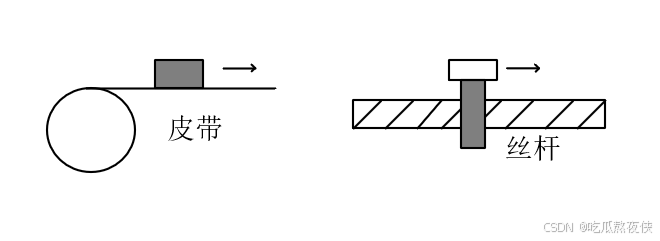
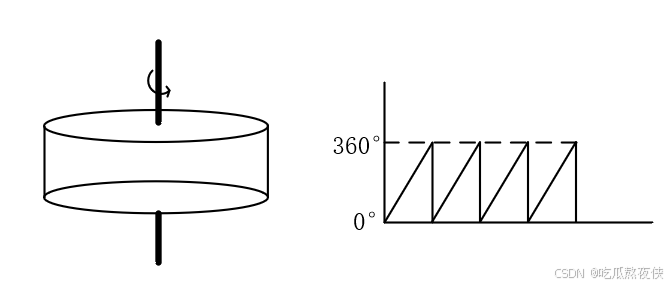
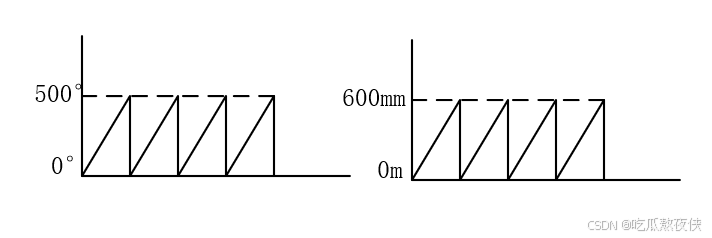
10、线性、旋转、模态轴
| 线性轴 |
|
|---|---|
| 旋转轴 |
|
| 模态轴 | 每过一定的角度或长度后重新计算,循环往复。既可以是旋转轴,也可以是线性轴。
|
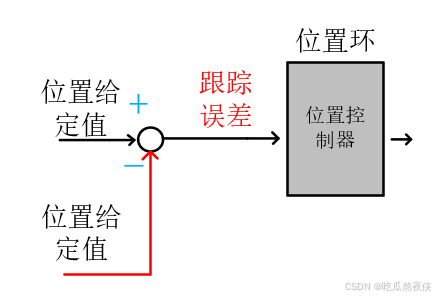
11、位置跟踪误差
- 位置环调节器前端的位置设定值与实际值的差值。
12、静态/动态跟踪误差、位置到达
| 动态跟踪误差 | 轴在运动过程中,位置设定值与实际值的差值 |
|---|---|
| 静态跟踪误差 | 当速度减为0时,位置设定值与实际值的差值 |
| 位置到达 | 当速度减为0时,且在一定的时间之内,位置设定值与实际值的差值一直没有超过设定值,则位置到达 |
- 跟踪误差的影响因素:
- 速度前馈,速度前馈系数从0到100%,100%后跟踪误差回明显减小;
- 位置环执行周期;
- 位置环比例增益Kp;
- 电机每圈对应的长度单位;
- 速度环、电流环的执行时间,及速度环的KP,有时会加力矩前馈。
- 跟踪误差关键两个因素:速度前馈+位置环增益
13、定位精度、基本定位(Epos)中的LU
- EPOS——点对点伺服运动控制模式,全称为电子定位系统(Encoder-based Point-to-Point Servo motion mode)
| 定位精度 |
|
|---|---|
| 基本定位(Epos)中的LU |
|
| 负载每圈、电机每圈的LU设定 |
|
14、实轴和虚轴
| 轴、速度、位置指令 |
|
|---|---|
| 实轴 |
|
| 虚轴 |
|
15、电子齿轮Gear
(1)、定义:轴与轴之间是一种纯比例关系,即成正比例函数关系,把这种关系定义为电子齿轮(类似于机械齿轮);
(2)、位置同步与速度同步:电子齿轮是轴与轴之间的一种位置同步,一定有位置环参与。而速度同步,没有位置环参与;
(3)、主从关系:在位置同步中,常常指的是主从之间的位置同步,而不是从轴之间的位置关系。我们会定义一个主轴,根据不同需求,主轴可以是实轴,也可以是虚轴。
16、电子凸轮CAM
(1)、定义:轴与轴之间是一种较为复杂的位置关系,即多项式关系,这种关系定义为电子凸轮CAM;
(2)、概念:电子凸轮是轴与轴之间的一种位置同步,一定有位置环参与,凸轮曲线表示的是主、从轴之间的位置关系。
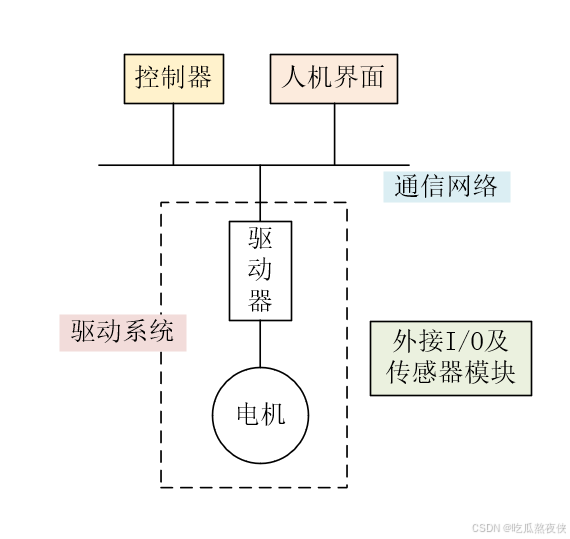
二、运动控制系统的组成
运动控制控制的是设备的“整个动作过程”,注重整个过程中的控制精度,以及设备的整体生产效率,需要考量运动轴的动态反应及多轴相互之间的协调。
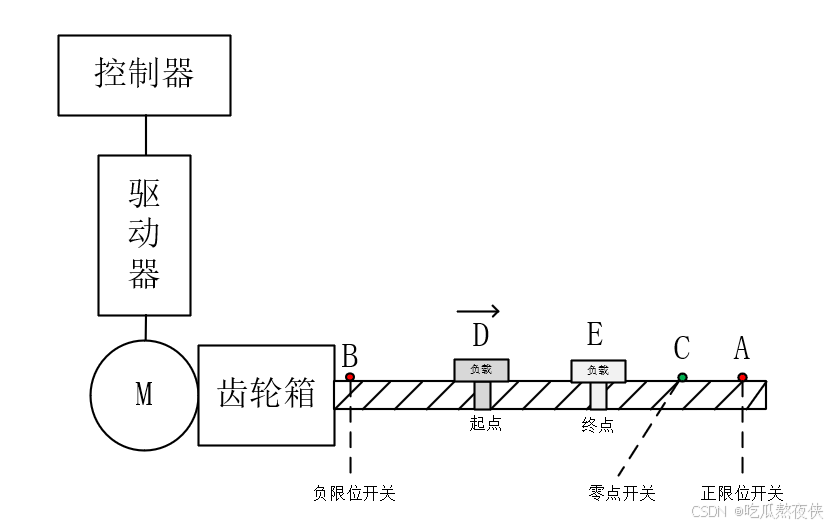
三、回零
- 回零是为了确保电气系统与机械系统有共同的基准点,定位控制必须回零。
| 回零方式 | |
|---|---|
| 主动回零 |
|
| 被动回零 |
|
| 直接设置零点 |
|
四、伺服电机编码器
1、增量编码器与绝对值编码器
| 增量编码器 |
|
|---|---|
| 单圈绝对值编码器 |
|
| 多圈绝对值编码器 |
|
2、编码器需要注意的几个点
(1)、编码器的精度,与类型无关,而是取决于编码器的分辨率;
(2)、增量编码器、单圈绝对值编码器在断电后,能够记忆机械位置,常用的几种方法比较:
| 1、在驱动器侧或者电机侧,外装电池盒(加装电池) | 优点:经济实惠 缺点:1)需要更换电池;2)装在电机侧,更换不方便;3)装在驱动器侧,需要考虑电缆长度。 |
|---|---|
| 2、单圈绝对值编码器(虚拟多圈、手动输入方向及圈数) | 优点:经济实惠。 断电后,负载被人为移动的距离小于半圈,不需做任何事情;移动距离大于半圈,需要手动输入方向和圈数。 |
3、电机编码器选择
(1)、电机编码器分类:
- 实际运用场景:旋转负载/直线负载
- 信号的类型:TTL/HTL/SSI/Sin/Cos
- 分辨率:1024/2048/13/17/21/23位
(2)、速度控制:分辨率很关键
(3)、位置控制(直线运动)
- 几乎不存在永远不需要回零点的应用场景;
- 严格意义上,想要保持高精度必须有机械零点开关,所有位置控制都要有机械零点开关;
-
为了消除打滑、机械尺寸、间隙等误差,必须在负载端装绝对值编码器。
(4)、选择方式
- 首选“增量/单圈绝对值编码器”,最后选择“多圈绝对值编码器”;
- 精度:选择合适的分辨率;
- 是否方便回零;
- 断电后的位置记忆。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











