






1-4为简单介绍机智云的一些基本内容
5-13为配置内容
一、何谓机智云
机智云是致力于物联网、智能硬件云服务的开发平台,为开发者提供自助式智能硬件开发工具和开放的云端服务(完全免费)。
二、代码自动生产工具
为了降低开发者的开发门槛,缩短开发周期,降低开发资源投入,机智云(Gizwits)推出可代码自动生成服务。云端会根据产品定义的数据点生成对应产品的设备端代码。
三、目前自动生成代码支持硬件设备方案
- 独立MCU方案 WIFI依靠串口与MCU进行通信(本次云家居使用此方案)
- SOC方案 (ESP8266、ESP32)
方案 说明 MCU方案 模组负责与云端信息的交互,通过串口与主控板(即MCU)进行通信,需要在MCU上讲行协议解析与外设按制的开发。 SoC方案 节省一颗MCU芯片,利用模组内部资源完成传感器操作和产品逻辑。
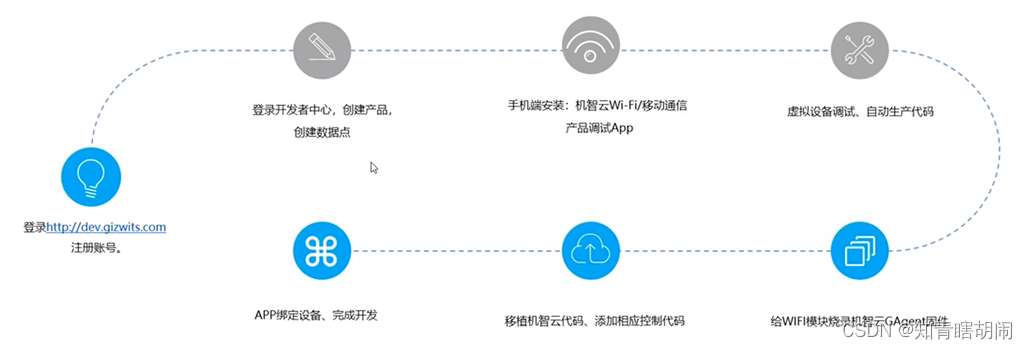
四、使用机智云开发产品
五、创建产品(重点开始)
- 打开机智云官网
机智云官网:机智云|物联网云平台,智能IoT开发云平台,智能IoT软件开发平台,智能IoT开发云平台,工业物联网解决方案
2、找到开发者平台,创建个人账号
如有账号可直接登陆,如无账号请注册后登录
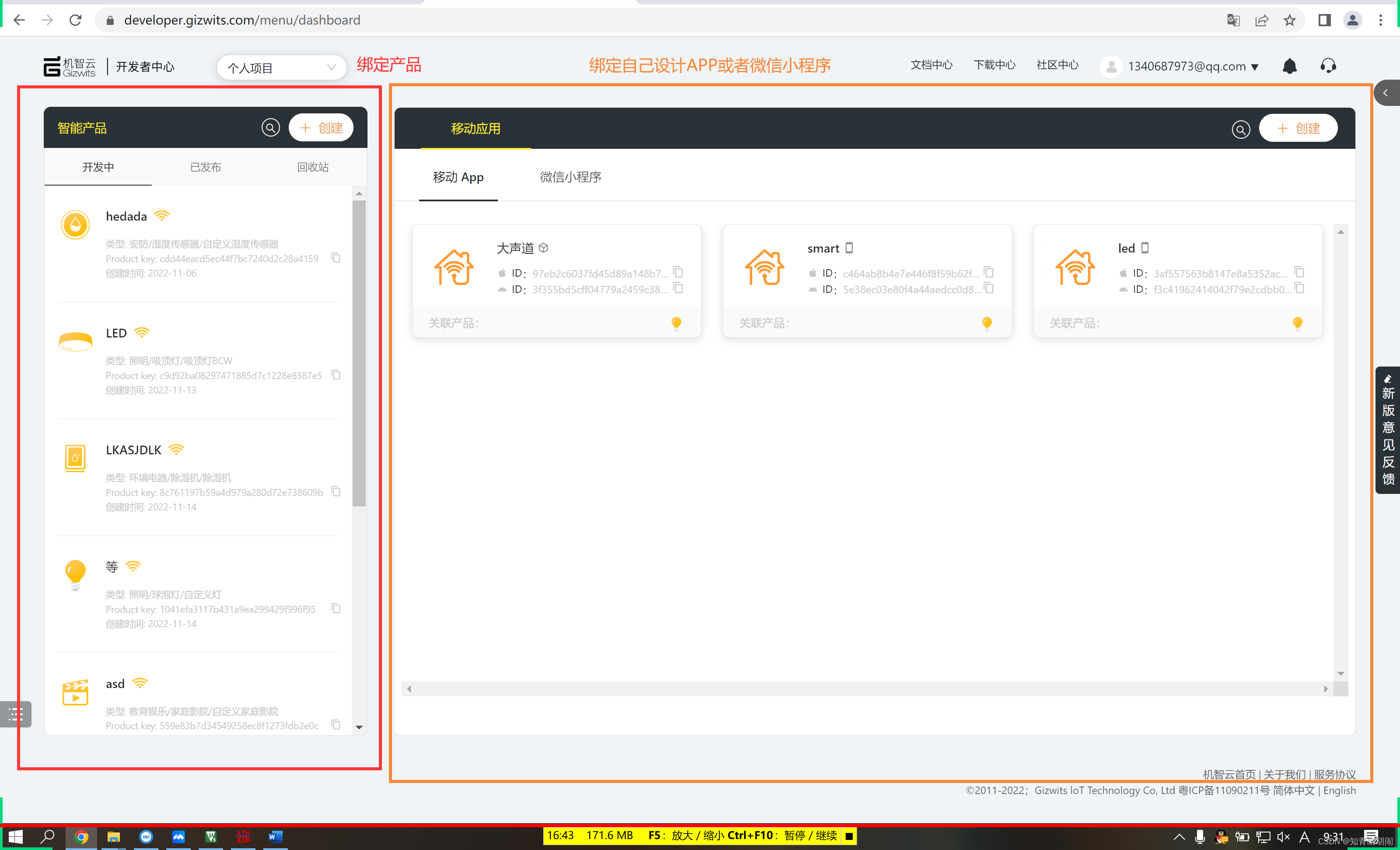
开发者中心页面如图所示

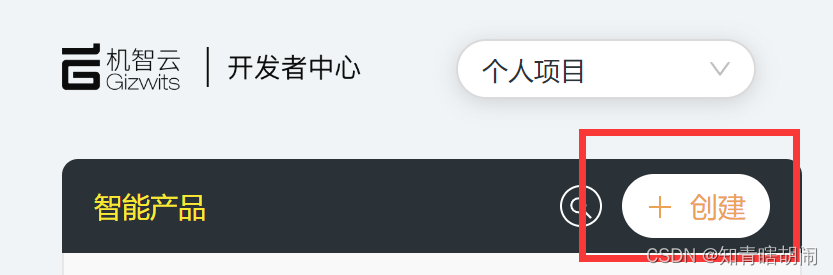
3、点击创建产品,创建一个新产品
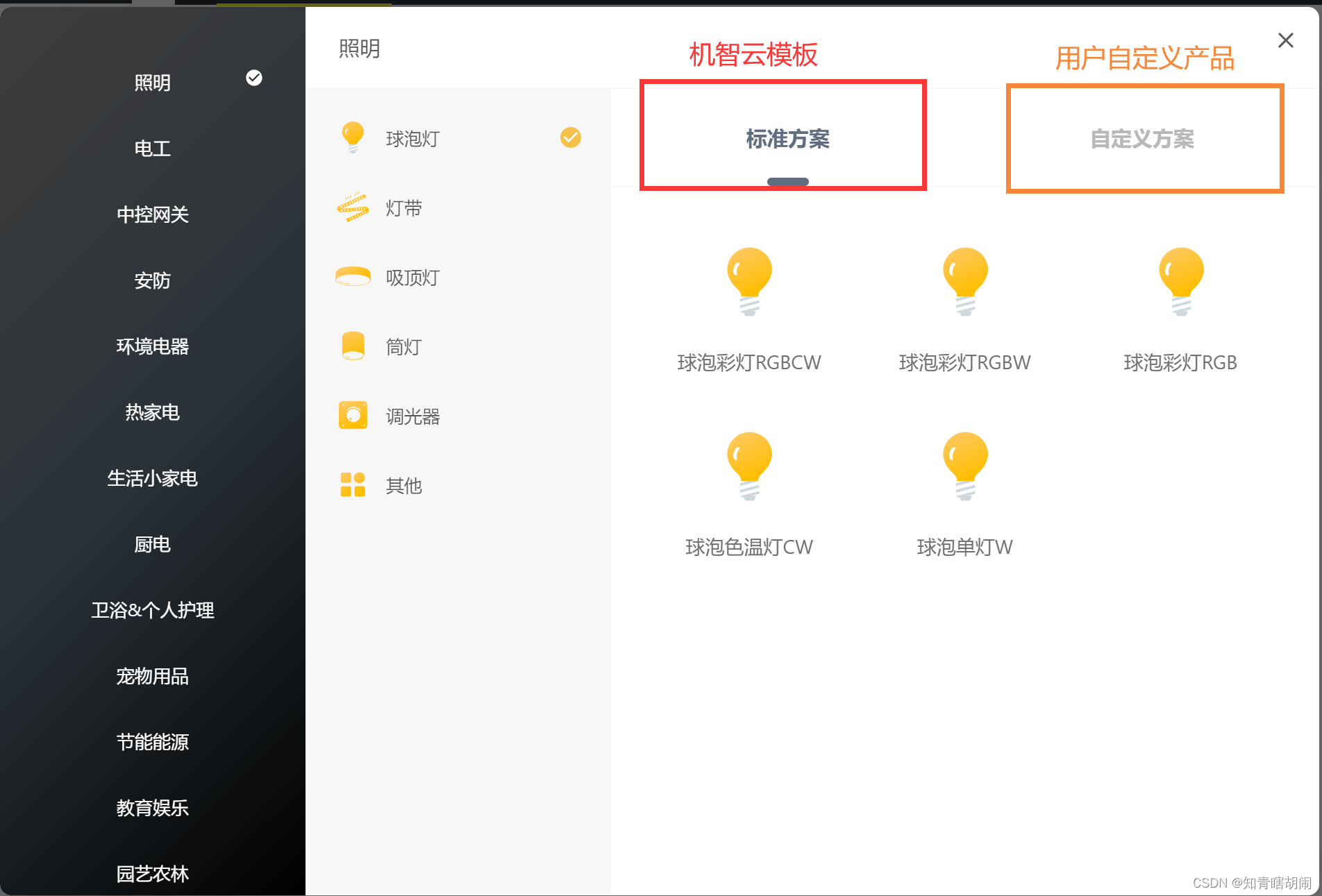
注:可用标准方案也可使用自定义方案
标准方案为机智云设定的功能定义模板,自由度低
自定义方案为用户自定义功能,自由度高
四、选择自定义方案,并如图设置

5、进入到新建产品中,点击去编辑添加数据点(功能定义)

6、添加所需要数据点 --- 即添加功能
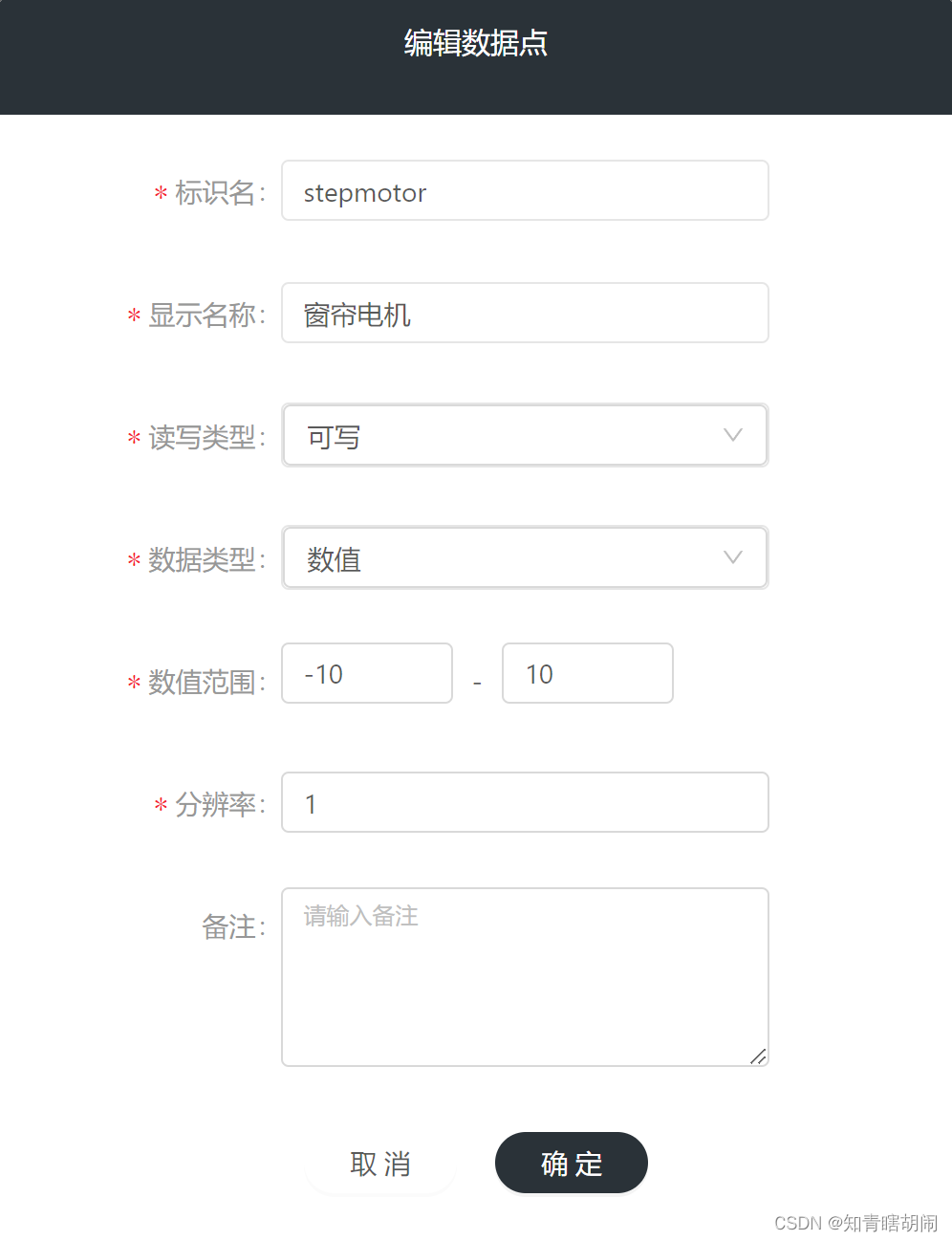
添加完如图所示:

到此创建产品完成。
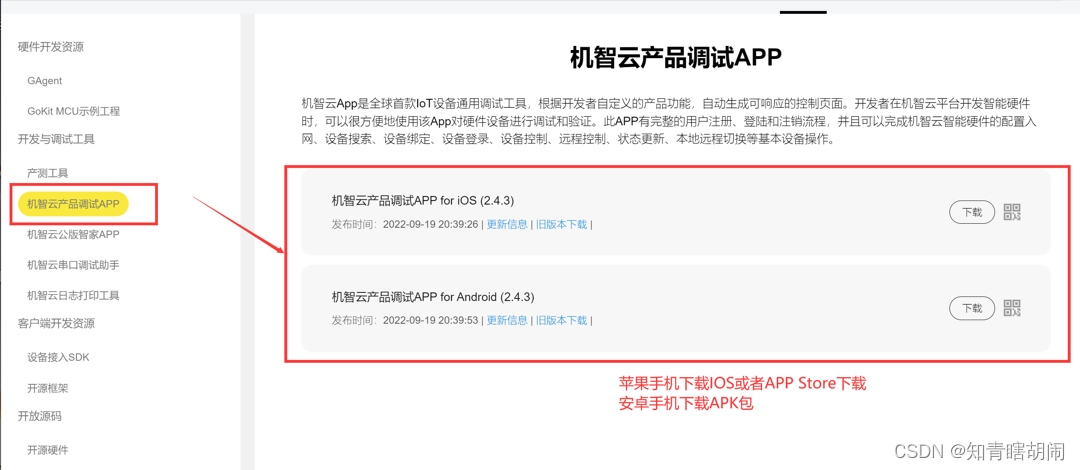
六、调试设备
- 返回开发者中心首页,点击“下载中心”
- 下载APP调试工具
3、下载完成后,打开虚拟设备调试
注意:新版机智云网页端二维码有bug,需要到旧版机智云扫码绑定设备
回到机智云官网首页,点击网页右上角“ENGLISH”,如图
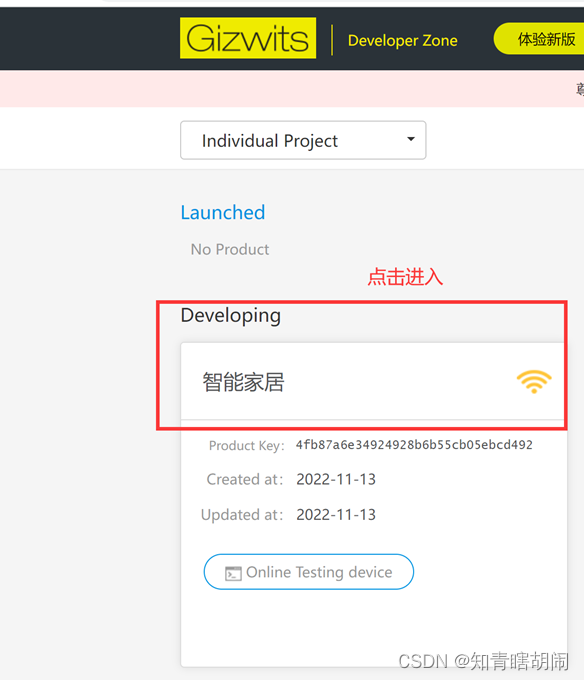
 4、进入旧版开发者中心,如图
4、进入旧版开发者中心,如图

5、进入产品生成调试二维码
继续往下走:
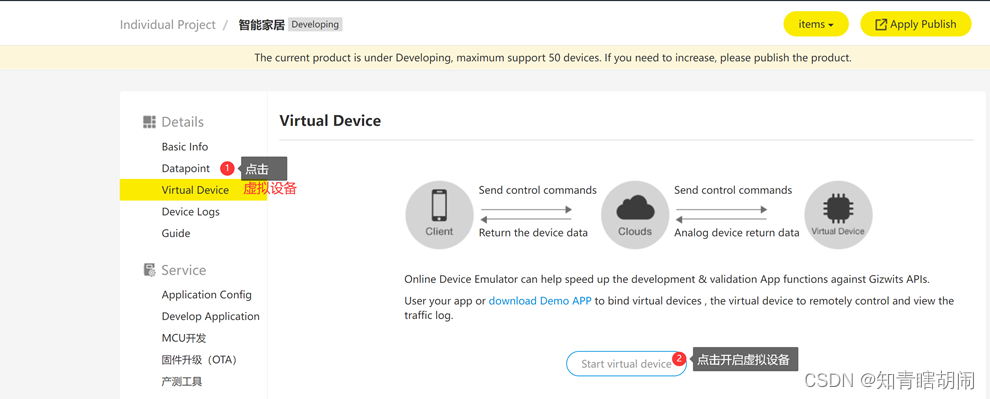
点击生成调试二维码:

6、手机端调试APP扫描二维码绑定设备

7、返回开发者中心进行调试,到此调查步骤完成。
七、移植代码准备
1、刷入机智云联网固件
下载固件 --- 下载中心

这个固件是给wifi模块烧录的,本次教学,使用的是ESP8266-01s,详细烧录过程,大家可移步到我的主页进行观看(为了方便大家,我还是把连接放到下方,有需要的同学可自行查看,以及下方含有机智云联网固件下载方式)
ESP8266-01s和CH340烧录机智云固件全解-CSDN博客
https://download.csdn.net/download/weixin_52680858/88326807?spm=1001.2014.3001.5503
八、自动生成Gizwits代码
这是机智云自动生成的代码,也就是我们配置的一下功能,机智云已经帮我们生成程序,我们只需要移植到我们的工程和找到对应的功能位置进行修改添加,便可联网成功。
1、生产代码

下载完解压:
以上为自动生成代码内容,此图PDF为代码移植步骤
九、移植代码准备
- 单片机需满足大于2kbyte的SRAM,机智云代码有环形缓冲区
- 准备好与WIFI模块连接的代码串口,需开启接收中断 波特率必须时9600
- 准备一个定时器,并开启1ms更新中断,为数据传输提供时基
- OK完事开始移植
- WIFI模块接在USART2(接在哪个模块,同学们可自由选择,本次教学以串口2为模板)
十、工程代码移植
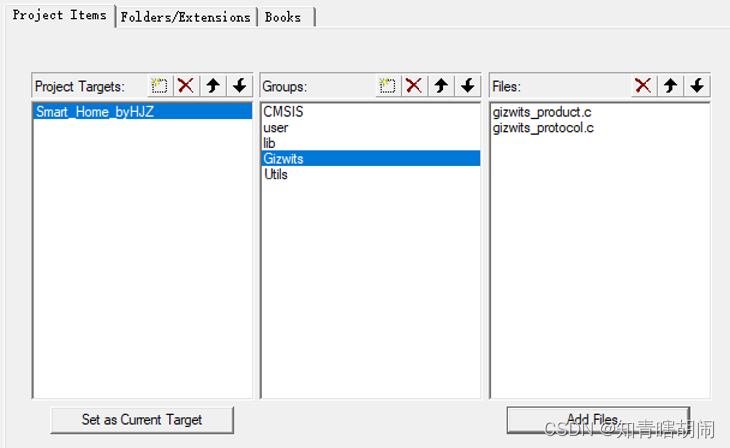
1、打开下载好的代码,选中标蓝的两个文件夹,如图
2、把复制的两个文件夹放到工程目录中
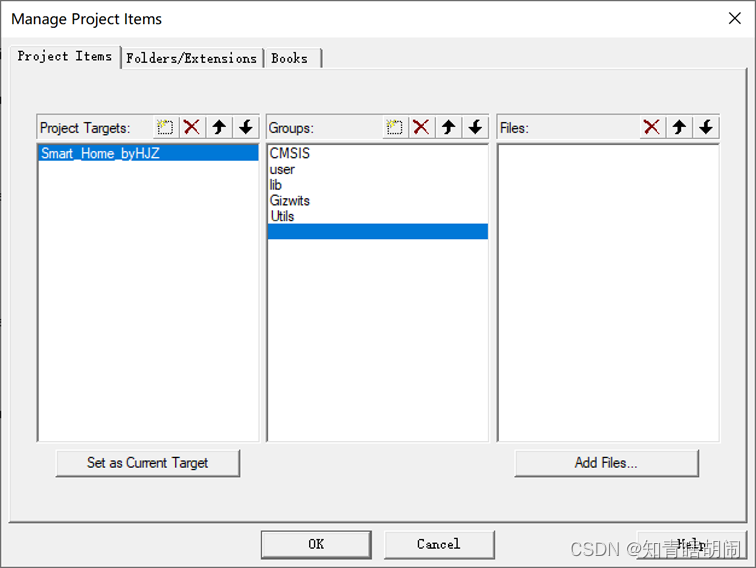
 3、打开工程配置设备虚拟树
3、打开工程配置设备虚拟树
注:因为每个人创建的工程目录习惯不一样,所以大家的目录可能各不相同,同学们只需要把我第一步的两个文件移植进来即可
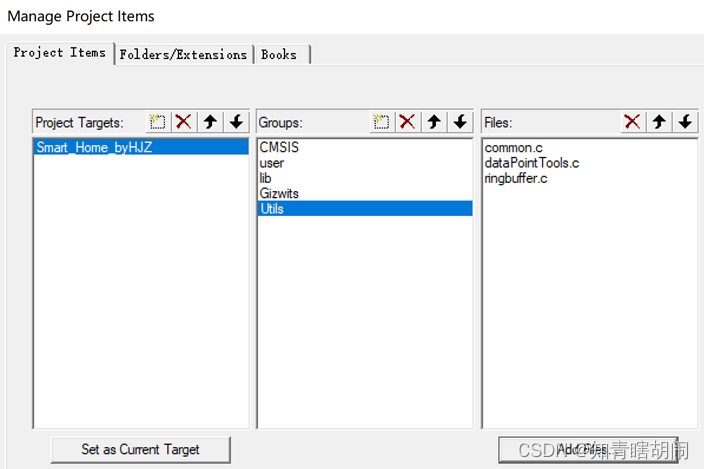
4、添加对应.c文件
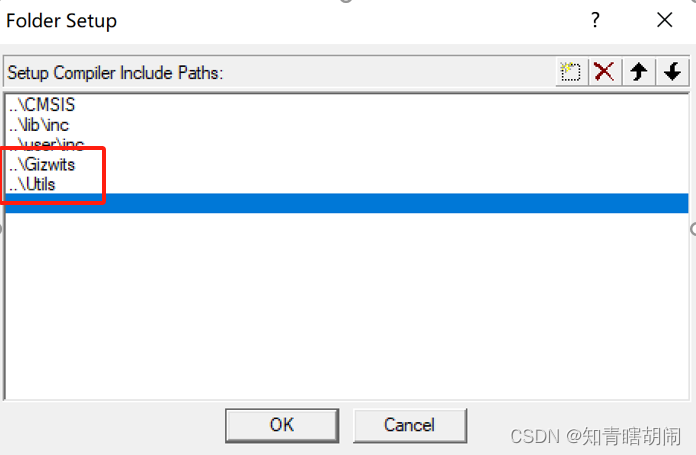
5、包含相关头文件路径
魔法棒---C/C++---include

6、编写USART2代码 ---- 注意波特率必须为9600
void Usart2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;//定义结构体变量名
USART_InitTypeDef usart_InitTypeDef;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//打开GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//打开GPIOA时钟
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//通用推挽输出
GPIO_InitStruct.GPIO_Pin =GPIO_Pin_2;//配置9号
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;//速度50Mhz
GPIO_Init(GPIOA,&GPIO_InitStruct);//初始化GPIOA
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//通用推挽输出
GPIO_InitStruct.GPIO_Pin =GPIO_Pin_3;//配置10号管脚
GPIO_Init(GPIOA,&GPIO_InitStruct);//初始化GPIOA
usart_InitTypeDef.USART_BaudRate = 9600;
usart_InitTypeDef.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
usart_InitTypeDef.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usart_InitTypeDef.USART_Parity = USART_Parity_No;
usart_InitTypeDef.USART_StopBits = USART_StopBits_1;
usart_InitTypeDef.USART_WordLength = USART_WordLength_8b;
USART_Init(USART2,&usart_InitTypeDef);
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
// USART_ITConfig(USART2,USART_IT_IDLE,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct={0};
NVIC_InitStruct.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStruct);
USART_Cmd(USART2,ENABLE);
}
void USART2_IRQHandler(void)
{
static u8 data;
if(USART_GetITStatus(USART2,USART_IT_RXNE))
{
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
data = USART_ReceiveData(USART2);
}
}
7、编写1ms定时器更新中断
void TIM1_Update(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);//打开TIM4时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct={0};
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStruct.TIM_Period = 1000 - 1;
TIM_TimeBaseInitStruct.TIM_Prescaler = 72 - 1;//72Mhz T=1/f = 1000hz
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct);
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);
NVIC_InitTypeDef NVIC_InitStruct={0};
NVIC_InitStruct.NVIC_IRQChannel = TIM1_UP_IRQn;//中断源
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;//使能中断源
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2;//抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2;//次级优先级
NVIC_Init(&NVIC_InitStruct);
TIM_Cmd(TIM1,ENABLE);
}
void TIM1_UP_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1,TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM1,TIM_IT_Update);
}
}
完成准备工作:
- 配置USART2代码并打开接收中断
- 完成TIM1 1ms更新中断代码
十一、移植步骤
移植代码说明:
- 实现与模组通信串口驱动(中断收数据写入环形缓冲区;实现uartWrite()串口发送函数) ->USART2
- 实现串口打印函数printf();
- 实现1ms定时器,gizTimerMs()维护系统时间 (提供时基)
- 实现MCU复位函数,模组可请求MCU复位
- 实现配置入网功能,调用gizwitsSetMode()函数实现模组配网功能
- 实现userHandle()数据的采集(上行逻辑)
- 实现 gizwitsEventProcess()控制命令的具体执行(下行逻辑)
具体参考官方移植过程
开始移植
1、WIFI串口接收数据写入缓冲区
将wifi 串口接收到数据写入到缓冲区中,而写入缓冲区的函数为gizPutData(),函数位置在gizwits_protocol.c文件下
注意:需在usart2.c文件里包含gizwits_protocol.h文件(要不调用函数为gizPutData()会报错)

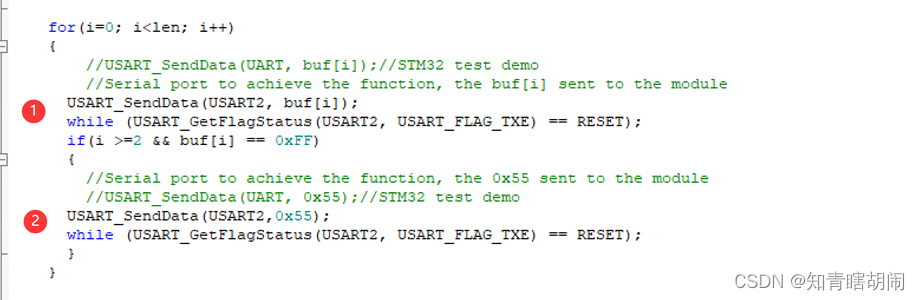
2、实现uartWrite()串口发送数据
在uartWrite()函数中.协议通信会用到这个函数,而这函数会涉及数据帧数据的发送。这里需我们提供串口的发送函数(这里我们用的是串口2), uartWrite()函数具体位置在gizwits_product.c文件下
3、实现毫秒定时
协议层的运行需要一个系统时间。事件单位为1毫秒,所以我们需要实现毫秒定时器(必须是 1ms的精确定时,若不准确,会影响到超时重发、定时上报等处理).gizTimerMs()函数具体位置在gizwits_product.c文件下
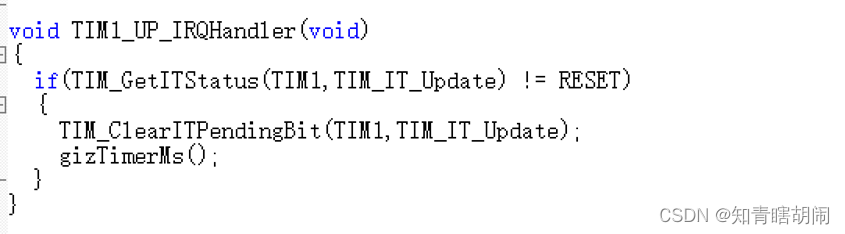
注意:原文件gizTimerMs();函数没有定义记得定义一次先,就是在gizwits_product.h文件进行定义
4、实现芯片复位函数
根据串口协议文档规定, 模组可以发送命令复位设备 MCU, 所以用户需要实现
mcuRestart()接口完成设备的复位。此函数在gizwits_product.h中
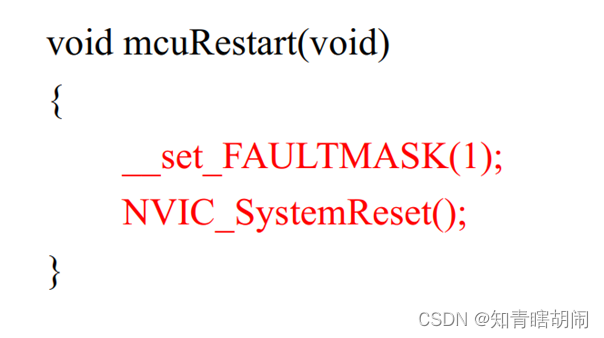
找到函数,添加对应内容
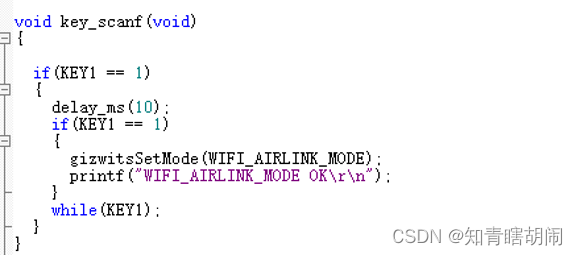
5、实现配置入网
模组支持 SoftAp 和 AirLink 两种方式配置入网, 相应接口为 gizwitsSetMode(), 建议采用按键的方式, 相应的按键动作触发执行具体的模式设置。另外, 可以通过 gizwitsSetMode()接口复位模组,此函数在gizwits_protocol.h中
WIFI_RESET_MODE 恢复默认出厂设置
WIFI_SOFTAP_MODE 热点配网
WIFI_AIRLINK_MODE 手机广播配网
这里我们选择的手机广播配网,(我使用的是按键控制联网)
key = key_scan();
if(key == 1)//设置配网模式
{
gizwitsSetMode(WIFI_AIRLINK_MODE);
printf("WIFI_AIRLINK_MODE OK\r\n");
}
if(key == 2)//恢复出厂设置
{
gizwitsSetMode(WIFI_RESET_MODE);
printf("WIFI_RESET_MODE OK\r\n");
}
6、协议处理
根据采集到的数据。然后调用函数 gizwitsHandle()、userHandle()上报,函数位置在gizwits_protocol.c文件中,该函数主要完成协议数据的处理及数据主动上报的相关操作。
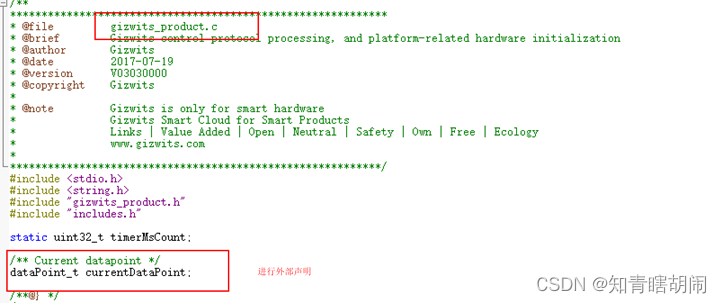
返回main.c
在main.c进行外部声明
![]()
在while(1)调用gizwitsHandle()和userHandle()上报数据
gizwitsHandle(¤tDataPoint);
userHandle();
注意:自己亦可封装这两个函数,需要联网操作都需要调用这两个函数
7、初始化
自己建立一个机智云初始化函数,函数内容如下图, 内容亦是我之前上面所说的
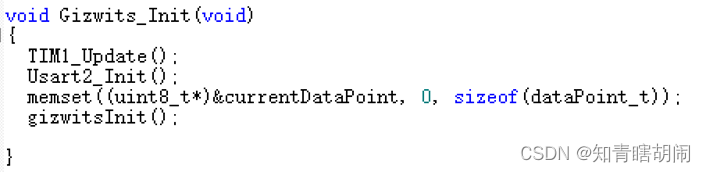
//机智云初始化
void Gizwits_Init(void)
{
TIM1_Update();//TIM1初始化
Usart2_Init();//USART2初始化
memset((uint8_t*)¤tDataPoint, 0, sizeof(dataPoint_t));
gizwitsInit();
}
到这一步,配网就基本完成了
只是配网还不行,我们还需要进行数据上发到我们的机智云端,将数据显示在我们的app上,以及app如何下发命令控制我们单片机。这些都需要配置的。
十二、数据上下发配置
一、单片机上发数据到机智云云端
上发数据用到的函数为userHandle(),也就是我上面所说要放到while(1)里面的函数,只有这样我们的数据才能一直上发到云端,这个函数是在gizwits_protocol.c
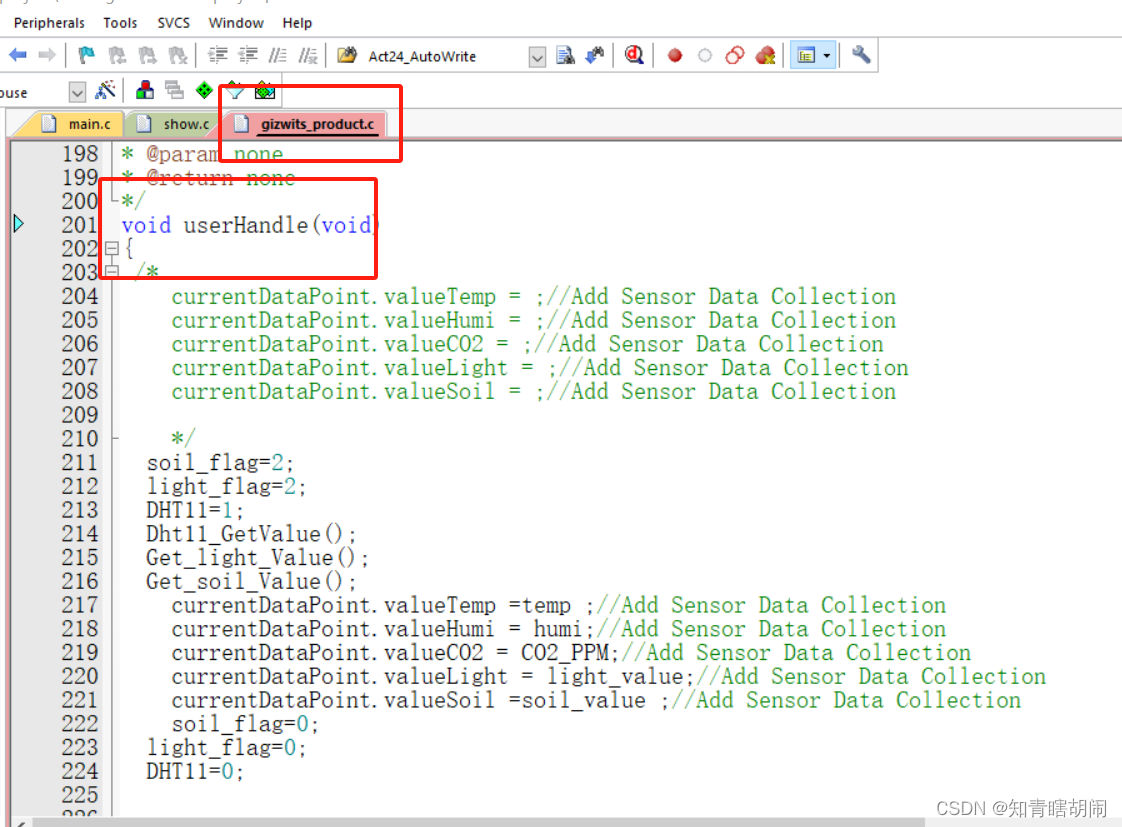
如我所示,我是将自己的温湿度、二氧化碳浓度等数据上传到机智云端。
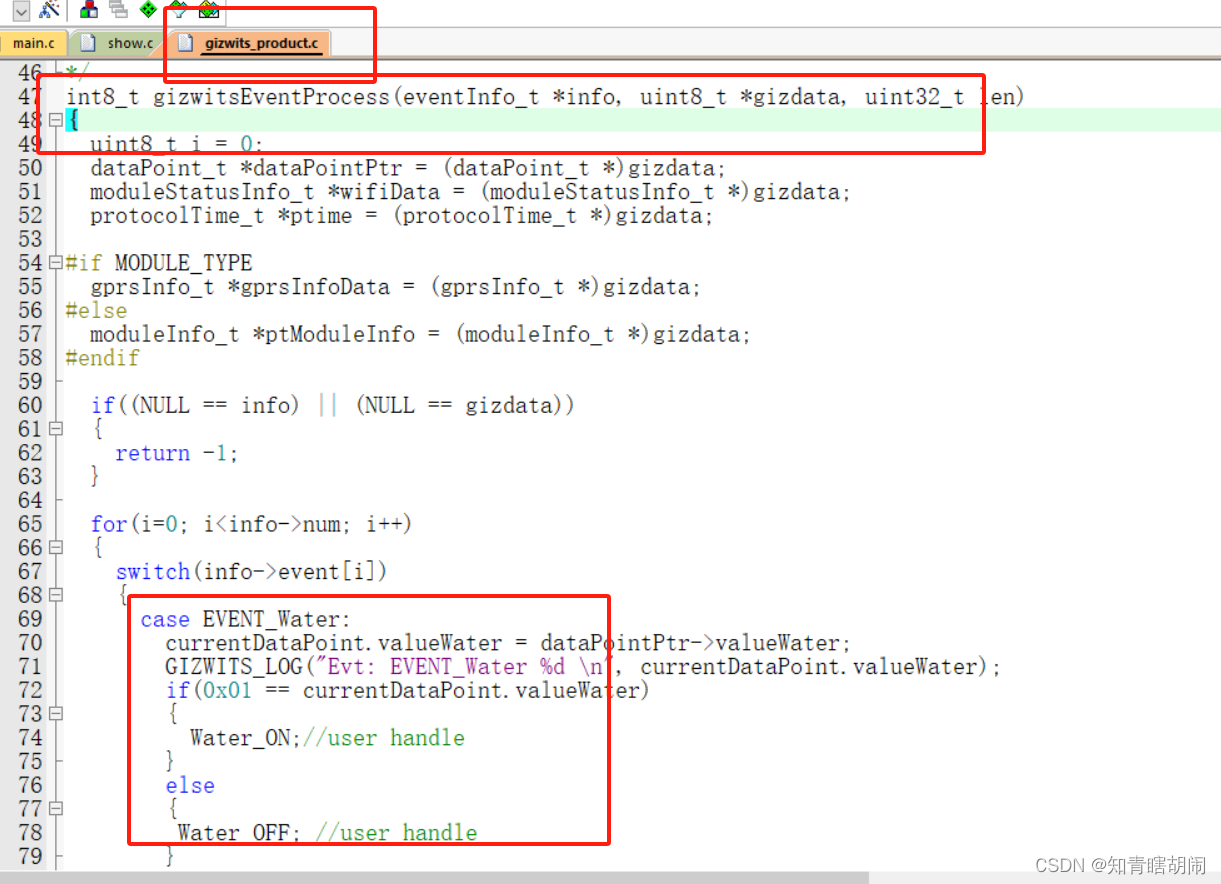
二、app下发命令配置
需要配置的文件gizwits_protocol.c
如我们在刚刚网页配置时,设置了一个0和1控制水泵打开,那机智云会生产对应的0和1操作,我们只需要找到对应的位置,然后往0和1里添加自己的开关便可,如下图所示:
十三、配置成功
到这一步,基本已经配置成功了,是不是很简单,只需要按照程序来做,大家都能顺利成功配网。
看到这的同学,如果觉得对你有用,就麻烦大家点点赞和收藏,谢谢!!!!相关工程对照可参考下面工程代码,或者去我的主页下载。
https://download.csdn.net/download/weixin_52680858/90276830
---------以下内容为打广告-----------
本人承接各种单片机设计,价格实惠,有需要的同学可联系本人QQ1972218606
---------------------------------------------
如图为配置成功模板:




















 7379
7379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











