






一、主要功能
本次设计使用的芯片是STM32F103C8T6,主要通过对超声波传感器实现对水位的监控,浊度传感器检测水质,并且当水位过高的时候,启动抽水泵工作从而减低水位高度,水位过低的时候,启动进水泵抽水就来,提高水位高度。系统带有声光报警系统,当水位过高或者水位过低时,会进行声光报警,提示用户水位情况。
为了可以实时的监控水位水质情况,系统设有联网功能,单片机可以实时的将检测到的数据通过wifi模块将数据传递给机智云服务器,数据显示在app上面,用户可实时查看数据和操控水泵蜂、蜂鸣器等操作。
系统设有三种控制模数,第一种为自动控制模式:在此模式下,系统将检测到的数据显示在OLED屏幕上,且当数据异常的时候,会自动执行响应操作,如水位过高蜂鸣器报警,抽水泵工作,降低水位。第二种模式为手动控制模式:在此模式下,可查看各个模块的参数和手动的打开控制操作。第三种模式为app控制模式:此模式下,app可实时查看各参数数据以及控制操作,如查看水位高度、水质浑浊度,以及水泵的开关等。

图中为手动模式下的各功能选择,第一个图标为查看水位和水质相关数据,第二个图标为出水水泵控制,第三各图标为进水水泵控制,第四个图标为wifi控制。
二、超声波水位测距讲解以及代码演示
本次使用的超声波测距使用的传感器是HC-SR04 ,此超声波测距模块可提供
2cm-400cm
的非接触式距离感测功能,测
距精度可达高到
3mm
;模块包括超声波发射器、接收器与控制电路
。
基本工作原理:
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声
波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
如下图接线,VCC供5V电源,GND为地线, TRIG触发控制信号输 入,ECHO 回响信号输出等四个接口端。

根据下面时序图表明你只需要提供一个 10uS
以上脉冲触发信号,该模块内部将 发出 8 个 40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。 回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号 时间间隔可以计算得到距离。公式:uS/58=厘米或者 uS/148=英寸;或是:距离= 高电平时间*声速(340M/S)/2;建议测量周期为 60ms 以上,以防止发射信号对 回响信号的影响。
#include "ultrasonic.h"
extern uint16_t mscount=0;//定义毫秒级计数
void HC_SR04Config(void)
{
GPIO_InitTypeDef GPIO_hcsr04init;//超声波时钟结构体初始化
TIM_TimeBaseInitTypeDef TIM_hcsr04init;//定时器时钟结构体初始化
NVIC_InitTypeDef NVIC_hcsr04init;//定时器中断结构体初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);//中断定时器优先级分组
//1.打开时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//打开GPIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//打开定时器时钟
//2.配置GPIO时钟
//Trig PB11 输出端 高电平
GPIO_hcsr04init.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_hcsr04init.GPIO_Pin = GPIO_Pin_7;//引脚11
GPIO_hcsr04init.GPIO_Speed = GPIO_Speed_50MHz;//速度为50Mhz
GPIO_Init(GPIOB,&GPIO_hcsr04init);//配置GPIO初始化函数
//Echo PB10 输入端
GPIO_hcsr04init.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_hcsr04init.GPIO_Pin = GPIO_Pin_6;//引脚10
GPIO_Init(GPIOB,&GPIO_hcsr04init);//配置GPIO初始化函数
//3.配置定时器结构体
TIM_hcsr04init.TIM_ClockDivision = TIM_CKD_DIV1;//不分频
TIM_hcsr04init.TIM_CounterMode = TIM_CounterMode_Up;//计数模式为向上计数
TIM_hcsr04init.TIM_Period = 100-1;//重装载值为99
TIM_hcsr04init.TIM_Prescaler = 72-1;//分频系数为71
TIM_TimeBaseInit(TIM4,&TIM_hcsr04init);//配置定时器初始化函数
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);//使能定时器中断
TIM_Cmd(TIM4,DISABLE);//失能定时器
//4.配置定时器中断结构体
NVIC_hcsr04init.NVIC_IRQChannel = TIM4_IRQn;//配置通道4
NVIC_hcsr04init.NVIC_IRQChannelCmd = ENABLE;//使能定时器中断
NVIC_hcsr04init.NVIC_IRQChannelPreemptionPriority = 0;//抢占优先级为0
NVIC_hcsr04init.NVIC_IRQChannelSubPriority = 0;//子优先级为0
NVIC_Init(&NVIC_hcsr04init);//配置中断初始化
}
void Open_Tim4(void)//定时器开启
{
TIM_SetCounter(TIM4,0);//开启定时器
mscount=0;
TIM_Cmd(TIM4,ENABLE);//打开定时器
}
void Close_Tim4(void)//定时器关闭
{
TIM_Cmd(TIM4,DISABLE);//失能定时器
}
void TIM4_IRQHandler(void)//中断服务函数(判断是否发生中断)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM4,TIM_IT_Update);//清除中断标志位
mscount++;
}
}
int GetEcho_time(void)//获取定时器的数值
{
uint32_t t=0;
t=mscount*100;//中断时间
t+= TIM_GetCounter(TIM4);//得到定时器计数时间
TIM4->CNT=0;//重装载值为0
// delay_ms(50);//延迟50ms
return t;
}
float Getlength(void)//获取距离长度
{
int i=0;//定义次数i
uint32_t t=0;//定义时间t
float length=0; //定义长度length
float sum=0;//距离求和
// Power_ON;
while(i!=5)//发送5次超声波
{
TRIG_Send(1);//发送超声波
delay_us(20);//发送20us
TRIG_Send(0);//停止发送超声波
while(ECHO_Reci==0);//当超声波发出后
Open_Tim4();//打开定时器
i=i+1; //次数加一
while(ECHO_Reci==1);//当收到超声波返回信号
Close_Tim4();//关闭定时器
t=GetEcho_time();//获取定时器计数数值
length=((float)34*t/1000.0/2);//计算出距离长度
sum=sum+length;//距离长度求和
delay_ms(85);
}
length=sum/5.0;//计算距离平均值
//len=length;
return length;//返回距离长度
}
#ifndef _ULTRASONIC_H
#define _ULTRASONIC_H
#include "includes.h"
void HC_SR04Config(void);
void Open_Tim4(void);
void Close_Tim4(void);
int GetEcho_time(void);
float Getlength(void);
#define TRIG_Send(a) if(a)\
GPIO_SetBits(GPIOB,GPIO_Pin_7);\
else\
GPIO_ResetBits(GPIOB,GPIO_Pin_7)
#define ECHO_Reci GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_6)
#endif
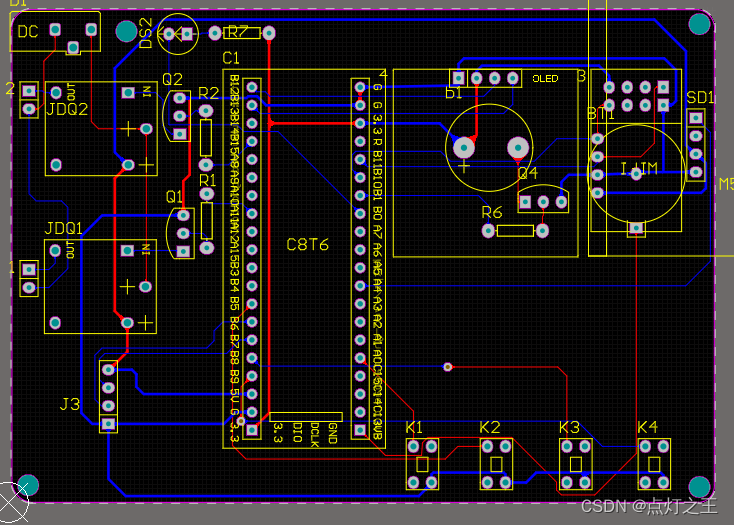
三、PCB
如想获取整个代码的同学,可添加本人QQ1972218606。
本人可接单片机系统设计,学生价,有兴趣的可联系本人


















 2884
2884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











