









前言:本博客是记录自己实验室购买宇树机械臂z1的环境配置过程(仿真部分)。
前提必要知识:
1、再运行仿真时,source一下devel下的setup.bash:source /devel/setup.bash
source /devel/setup.bash2、更改源:sudo gedit sources.list 更改后 sudo apt-get update更新
sudo apt-get update3、换源后报错 :检查是否联网,修改DNS,
sudo gedit /etc/systemd/resolved.conf 二、编译仿真环境时的报错:
报错1:
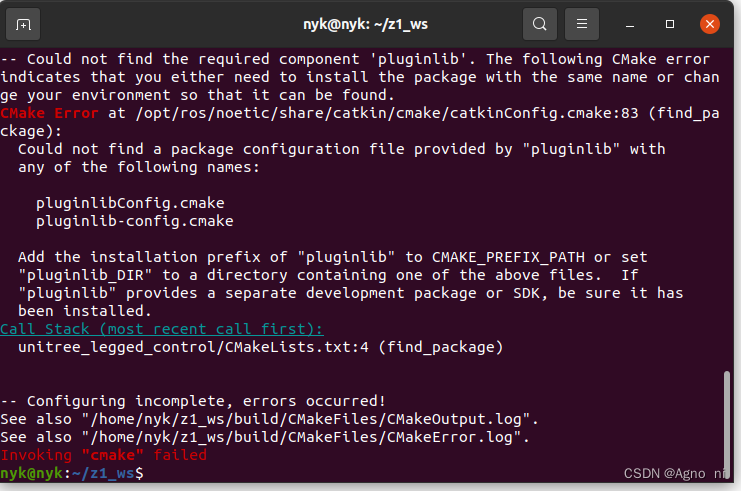
解决方案:sudo apt-get install ros-对应ros版本-对应包
#sudo apt-get install ros-对应ros版本-对应包
sudo apt-get install ros-melodic-pluginlib报错2:
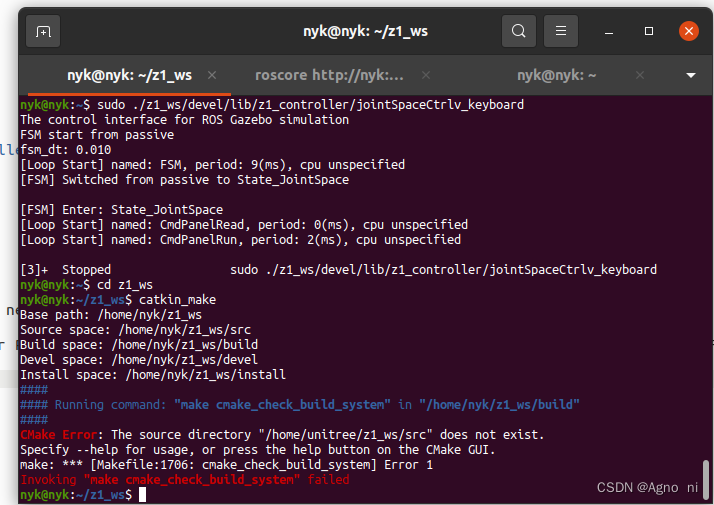
解决方案:文件路径错误检查自己的home路径
报错3:

解决方案:把toplevel.cmake里的内容复制到cmakelist中
错误3:
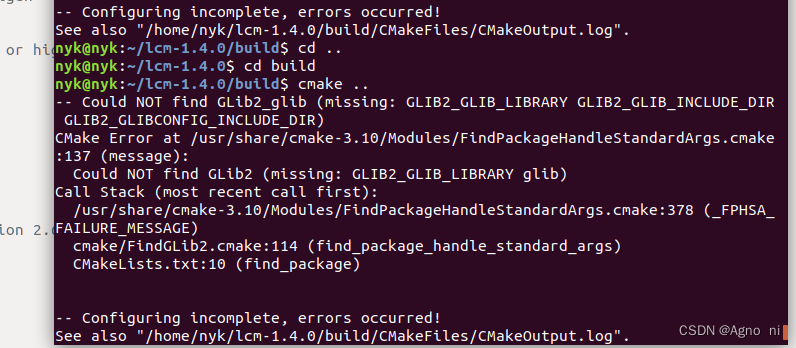
解决方案:包没下全,sudo apt-get install Glib2_glib
错误4:
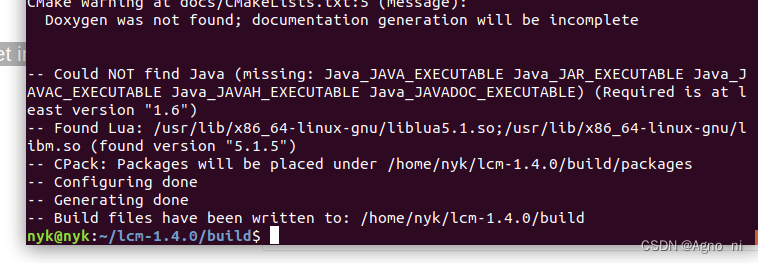
解决方案:详情请参考:https://stackoverflow.com/
错误5:

ping机械手时,修改第二个的IP就可以连上网的同时连上机械手了
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









