






目录
一.自带超时参数的函数
1.1 select函数
1、select函数的第五个参数,就是设置的时间
2、当时间到达后,该函数就会接触阻塞
struct timeval {
long tv_sec; /* seconds */
long tv_usec; /* microseconds */
};
and
struct timespec {
long tv_sec; /* seconds */
long tv_nsec; /* nanoseconds */
};#include<myhead.h>
int main(int argc, const char *argv[])
{
//1、定义检测容器
fd_set readfds;
//2、清空内容
FD_ZERO(&readfds);
//3、将文件描述符放入集合中
FD_SET(0, &readfds);
//4、定义超时时间变量
struct timeval tv = {5, 0};
while(1)
{
tv.tv_sec = 5;
tv.tv_usec = 0;
int res = select(1, &readfds, NULL, NULL, &tv);
if(res == -1)
{
perror("select error");
return -1;
}else if(res == 0)
{
printf("time out\n");
return -1;
}
//判断
if(FD_ISSET(0, &readfds))
{
int num = 0;
scanf("%d", &num);
printf("触发键盘输入:%d\n", num);
}
}
return 0;
}
1.2 poll函数的自带超时检测参数
1、poll函数的第三个参数,是以毫秒为单位的超时时间
2、当时间到达后,会接触阻塞,进而做相关事情
3、是一个整型变量,值传递
#include<myhead.h>
int main(int argc, const char *argv[])
{
//1、定义文件描述符集合
struct pollfd pfd;
pfd.fd = 0; //表示检测的是0号文件描述符
pfd.events = POLLIN; //表示检测读事件
//2、调用函数
while(1)
{
int res = poll(&pfd, 1, 5000);
if(res == -1)
{
perror("poll error");
return -1;
}else if(res == 0)
{
printf("time out\n");
return -1;
}
//判断
if(pfd.revents == POLLIN)
{
int num = 0;
scanf("%d", &num);
printf("触发键盘输入:%d\n", num);
}
}
return 0;
}
二、不带超时检测参数的函数
1> 对于套接字通信时,可以使用setsockopt函数,对应用层的SO_RCVTIMEO进行设置
2> 如果时间已经到达,那么对于的函数会返回-1,并将错误码置为成EAGAIN
#include<myhead.h>
#define SER_IP "192.168.125.113"
#define SER_PORT 8888
#include<errno.h>
int main(int argc, const char *argv[])
{
//1、创建用于连接的套接字文件描述符
int sfd = socket(AF_INET, SOCK_STREAM, 0);
if(sfd == -1)
{
perror("socket error");
return -1;
}
//3\、设置地址能够快速重用
int reuse = 1;
if(setsockopt(sfd, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse))==-1)
{
perror("setsockopt error");
return -1;
}
//2、绑定ip和端口号
//2.1 准备地址信息结构体
struct sockaddr_in sin;
sin.sin_family = AF_INET; //通信域
sin.sin_port = htons(SER_PORT); //端口号
sin.sin_addr.s_addr = inet_addr(SER_IP); //ip地址
//2.2 绑定工作
if(bind(sfd, (struct sockaddr*)&sin, sizeof(sin)) ==-1)
{
perror("bind error");
return -1;
}
printf("bind success\n");
//3、将套接字设置成被动监听状态
if(listen(sfd, 128)==-1)
{
perror("listen error");
return -1;
}
printf("listen success\n");
//设置接受超时时间
struct timeval tv = {5, 0};
if(setsockopt(sfd, SOL_SOCKET, SO_RCVTIMEO, &tv, sizeof(tv))==-1)
{
perror("setsockopt error");
return -1;
}
//4、阻塞等待客户端的连接
//4.1 定义用于接受客户端信息的容器
struct sockaddr_in cin;
socklen_t addrlen = sizeof(cin);
int newfd = accept(sfd, (struct sockaddr*)&cin, &addrlen);
if(newfd == -1)
{
//判断是否因为超时而解除的阻塞
if(errno == EAGAIN)
{
printf("time out\n");
return -1;
}
perror("accept error");
return -1;
}
printf("[%s:%d]:发来连接请求\n", inet_ntoa(cin.sin_addr), ntohs(cin.sin_port));
return 0;
}
三、通过信号完成时间的设置
#include <unistd.h>
unsigned int alarm(unsigned int seconds);
功能:设置一个定时器,在时间到达后,会发射一个SIGALRM的信号
参数:以秒为单位的时间, 如果参数设置成0,表示取消该定时器
返回值:如果该定时器之前没有定时器,则返回0,如果该定时器之前有定时器,会返回上一个定时器剩余的秒数,并更新上一个定时器为该定时器#include<myhead.h>
//定义信号处理函数
void handler(int signo)
{
if(signo == SIGALRM)
{
printf("系统已经随机为您出一张牌\n");
alarm(5);
}
}
int main(int argc, const char *argv[])
{
char ch; //用户选择的牌
//将SIGALRM信号捕获到自定义函数中
if(signal(SIGALRM, handler) == SIG_ERR)
{
perror("signal error");
return -1;
}
while(1)
{
alarm(5); //给出5秒考虑时间
printf("请出牌>>>");
scanf("%c", &ch);
getchar();
printf("您出的牌为:%c\n", ch);
}
return 0;
}
四、更新下载源
cd /etc/apt/
sudo cp sources.list sources.list.save 将原镜像备份
sudo vim sources.list 将原镜像修改成阿里源/清华源,如所述4.1清华源
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse4.2阿里源
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse上述操作完毕后,保存退出,执行下列
sudo apt-get update:
五、wireshark使用
5.1. 安装
wireshark的官方下载网站:www.wireshark.org/
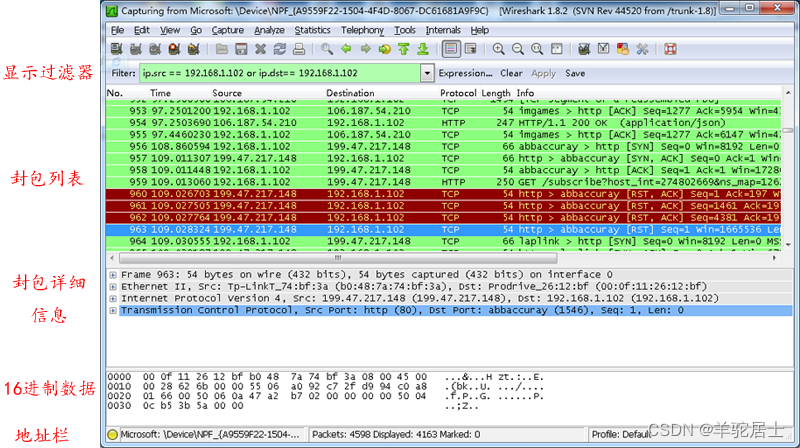
5.2. wireshark 抓包
开始界面
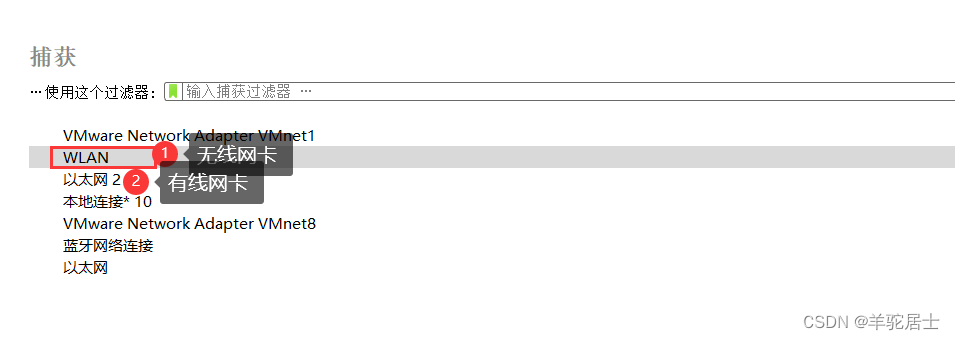
- wireshark是捕获机器上的某一块网卡的网络包,当你的机器上有多块网卡的时候,你需要选择一个网卡。
- 双击需要的网卡,开始抓包
5.2.1 wireshark与对应的OSI七层模型
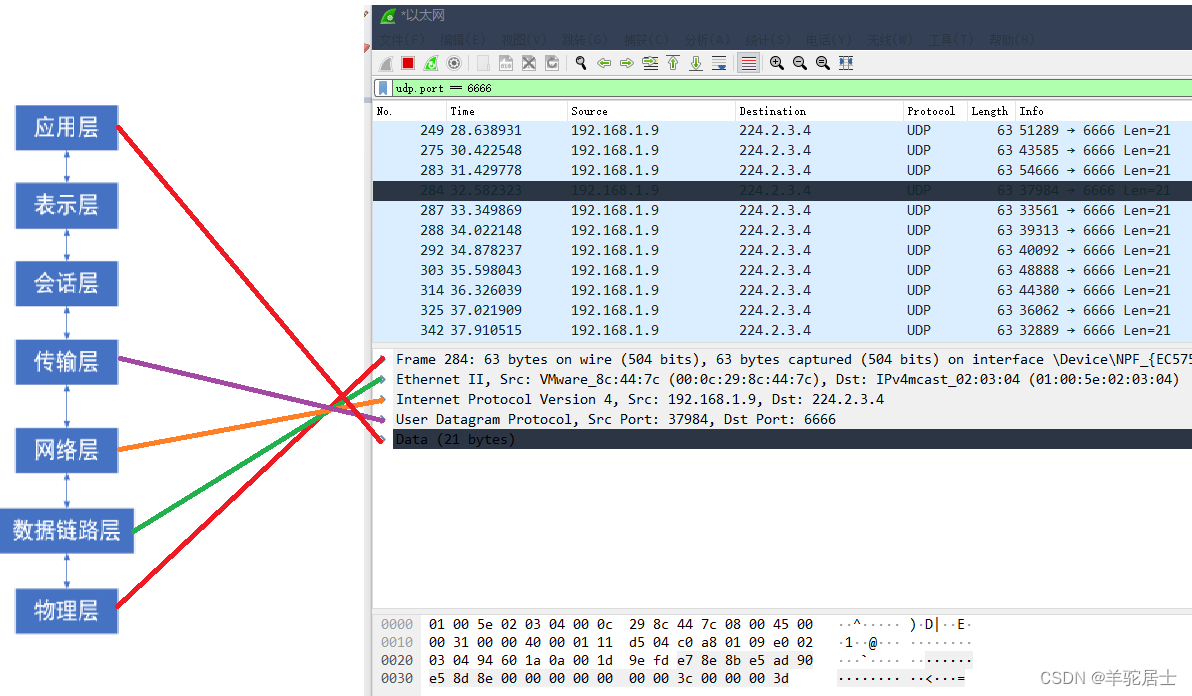
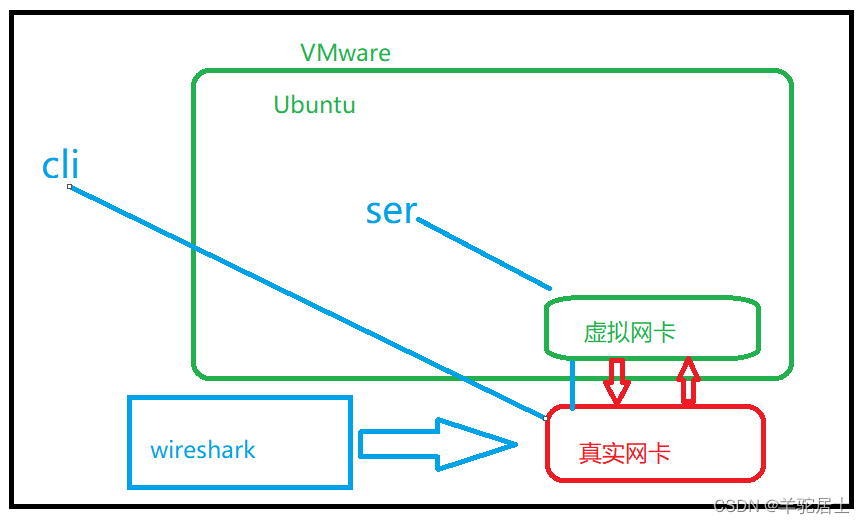
服务器和客户端的代码不能都运行在ubuntu,因为wireshark抓的是流经真实网卡的数据包。
若将服务器客户端都运行在ubuntu,数据直接经过虚拟网卡通信,而不会经过真实网卡。
 5.2.2 包头分析
5.2.2 包头分析
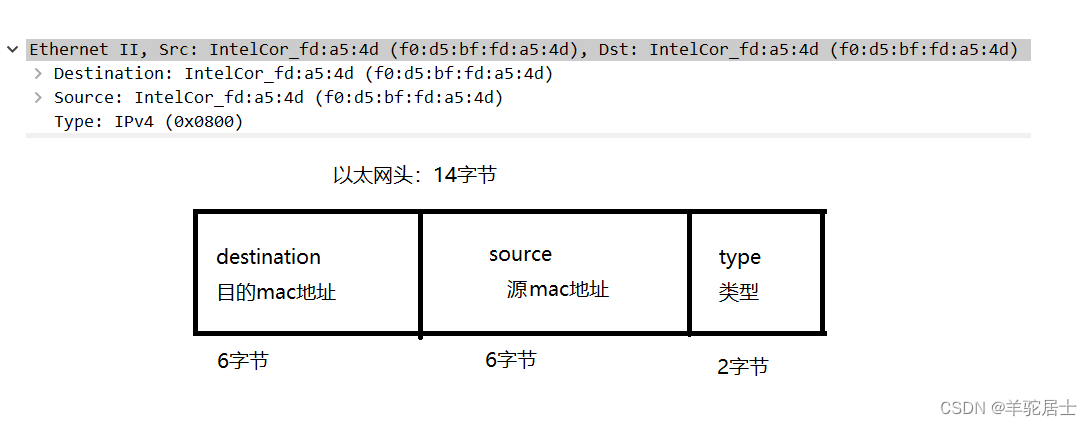
以太网头
以太网中封装了源mac地址以及目的mac地址,还有ip类型,以太网又称之为mac头
0X0800 只接收发往本机的mac的ip类型的数据帧
0X0806 只接收发往本机的ARP类型的数据帧
0x8035 只接受发往本机的RARP类型的数据帧
0X0003 接收发往本机的MAC所有类型:ip,arp,rarp数据帧,接收从本机发出去的数据帧,
混杂模式打开的情况下,会接收到非发往本地的MAC数据帧
5.2.3 ip头
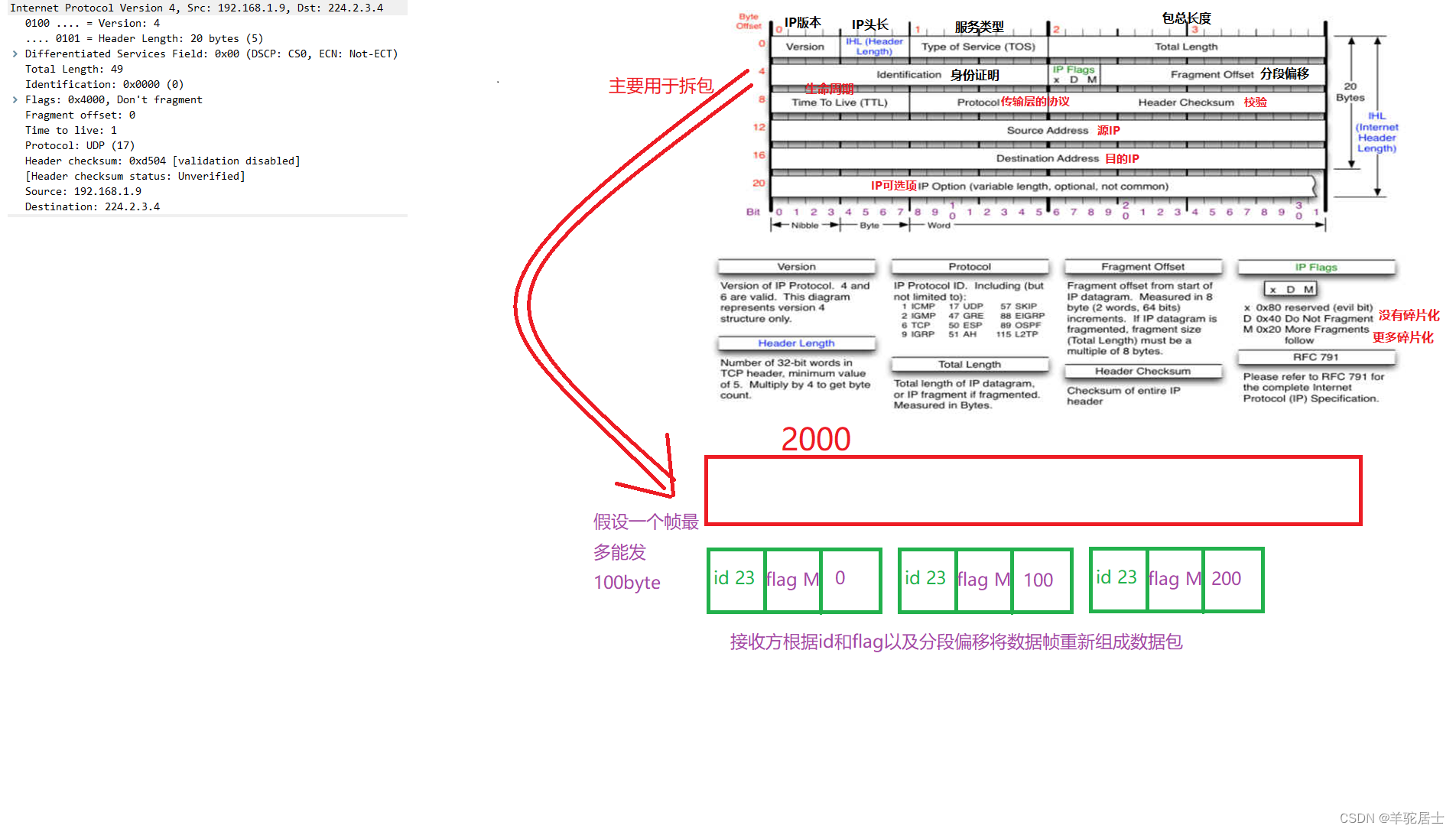
IP头中需要掌握用于拆包的部分:id flags fregment_offset
两个IP地址:源IP与目的IP地址。
TTL:time to live, 指定数据帧可以最多经过几个路由器。当数据帧被目标方接收后,TTL清除为0.
Linux TTL:64 Winodws:TTL 128
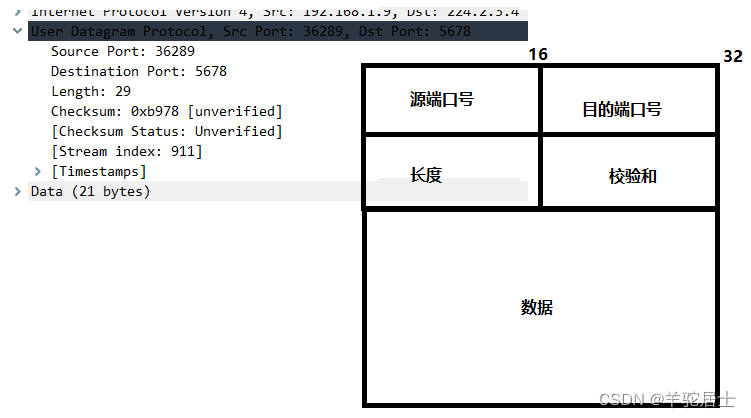
5.2.4udp头
5.2.5tcp头
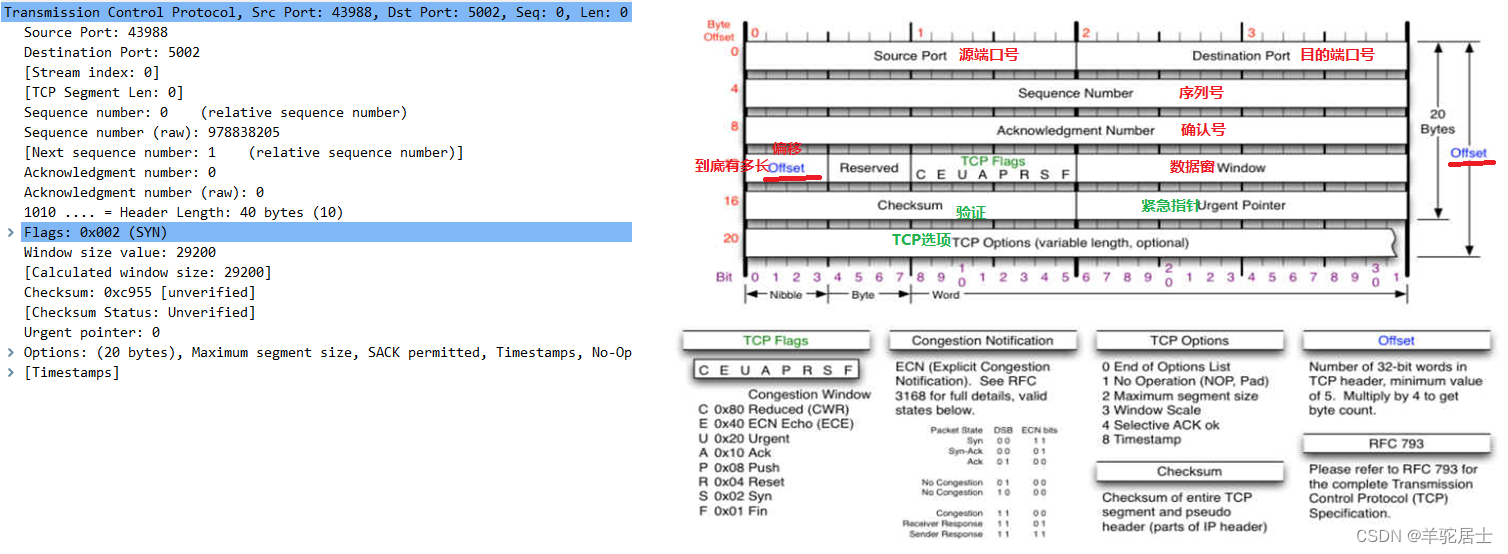
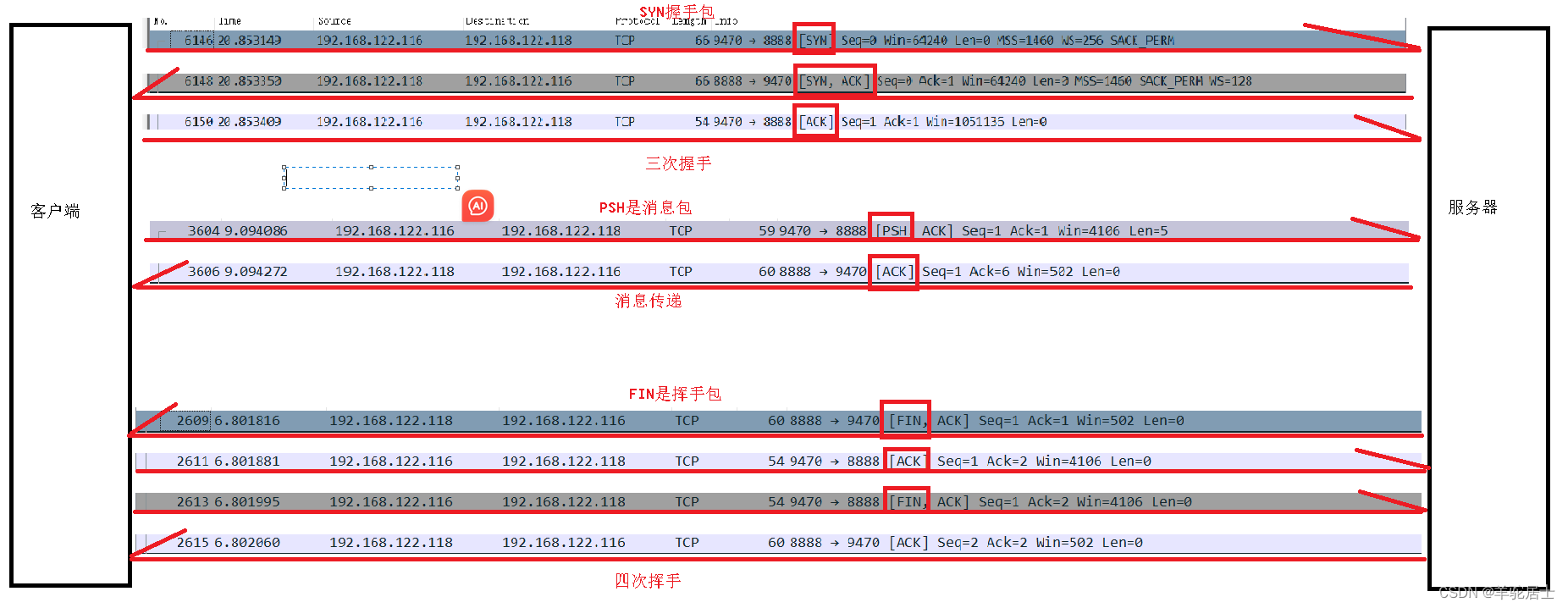
Seq:序列号,占4个字节,用于给数据段进行编号的。所有非应答包的数据段,都有seq。
Ack:应答号,用于应答非应答包(握手包,挥手包,数据包)。告诉对方下一次从这个seq编号发送数据包。
SYN:握手包,连接的时候产生的包
FIN:挥手包,断开连接产生的包
PSH:数据包,传输数据时候产生的包
ACK:应答包
PSH Ack = Seq+len;
SYN FIN Ack = Seq+1;
六、三次握手 四次挥手
6.1三次握手
三次握手的发起方,肯定是客户端

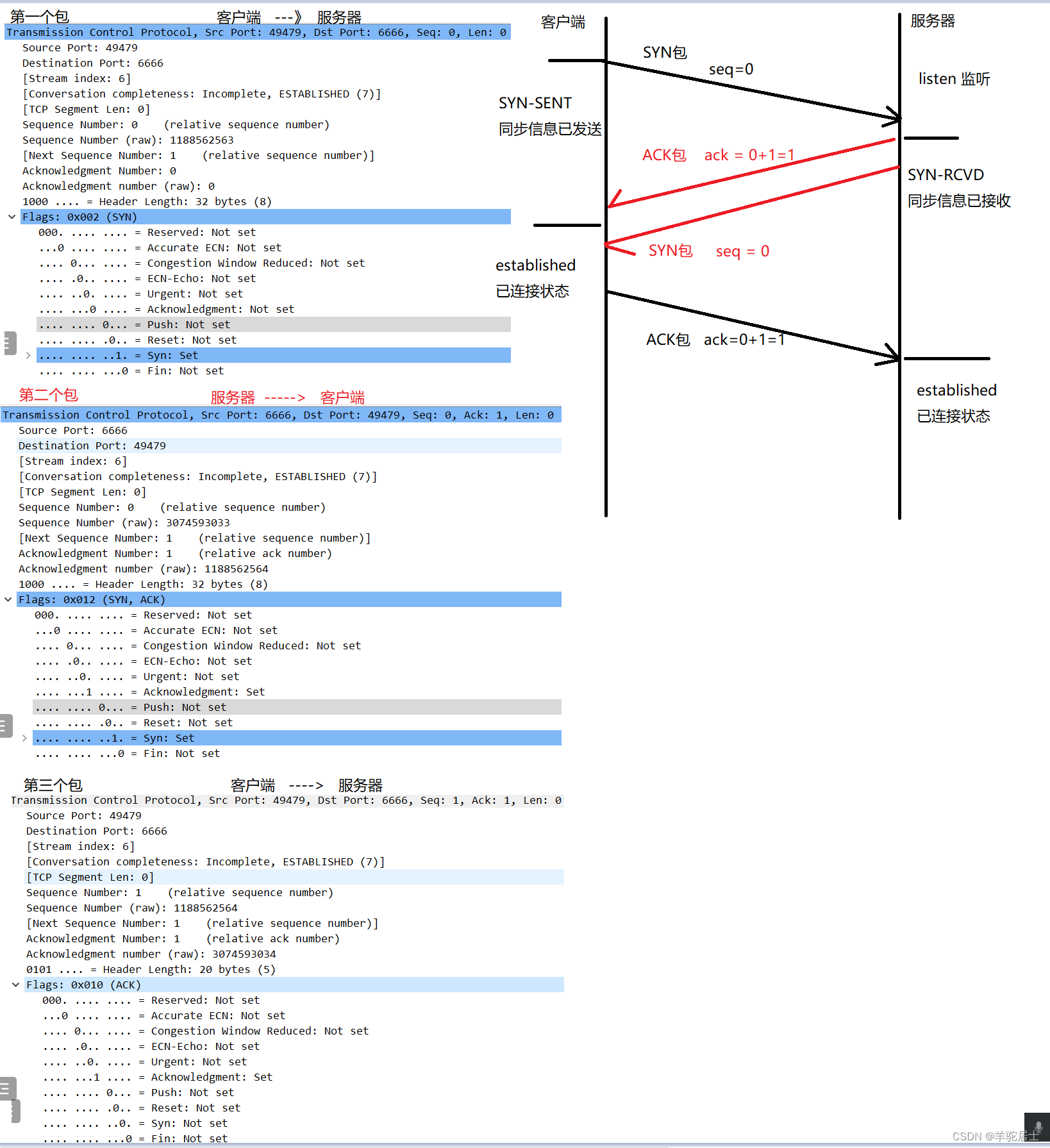
- 第一次握手:客户端发送SYN包(SYN=1, seq=0)给服务器,并进入SYN_SENT状态,等待服务器返回确认包。
- 第二次握手:服务器接收到SYN包,确认客户端的SYN,发送ACK包(ACK=1 , ack=1),同时发送一个SYN包(SYN=1, seq=0),并进入SYN_RCVD状态。
- 第三次握手:客户端接收到服务器的SYN包,以及ACK包,进入establish状态,同时向服务器发送ACK包(ACK=1, ack=1)。此时三次握手包发送完毕,服务器也进入establish状态
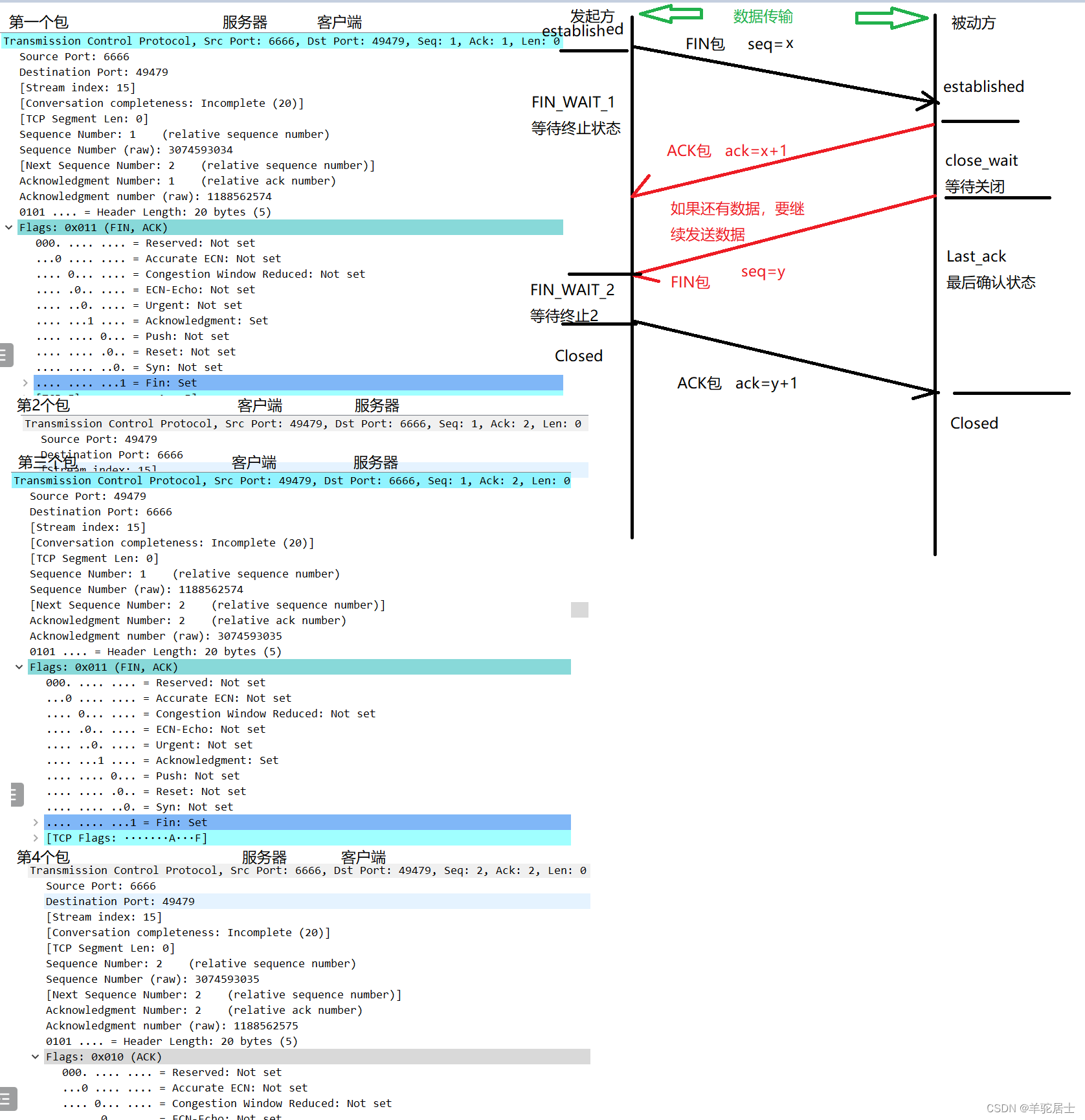
6.2四次挥手
四次挥手的发起方可能是服务器,也可能是客户端
- 第一次挥手,主动关闭方发送一个FIN包(FIN=1, seq = u)给被动方,进入FIN_WAIT_1状态;
- 第二次挥手:被动方接收到FIN包,给主动方发送一个ACK包(ACK=1, ack=u+1);并进入CLOKSE_WAIT状态。主动方接受到ACK包后,进入FIN_WAIT_2状态。如果有数据没有发送完毕,则继续发送,直到发送完毕为止;
- 第三次挥手:被动方发送一个FIN包(FIN=1, seq=w),进入LAST_ACK状态.
- 第四次挥手:主动关闭方收到FIN包,回复一个ACK包(ACK=1, ack=w+1)。被动关闭方收到主动关闭方的ACK后关闭连接。

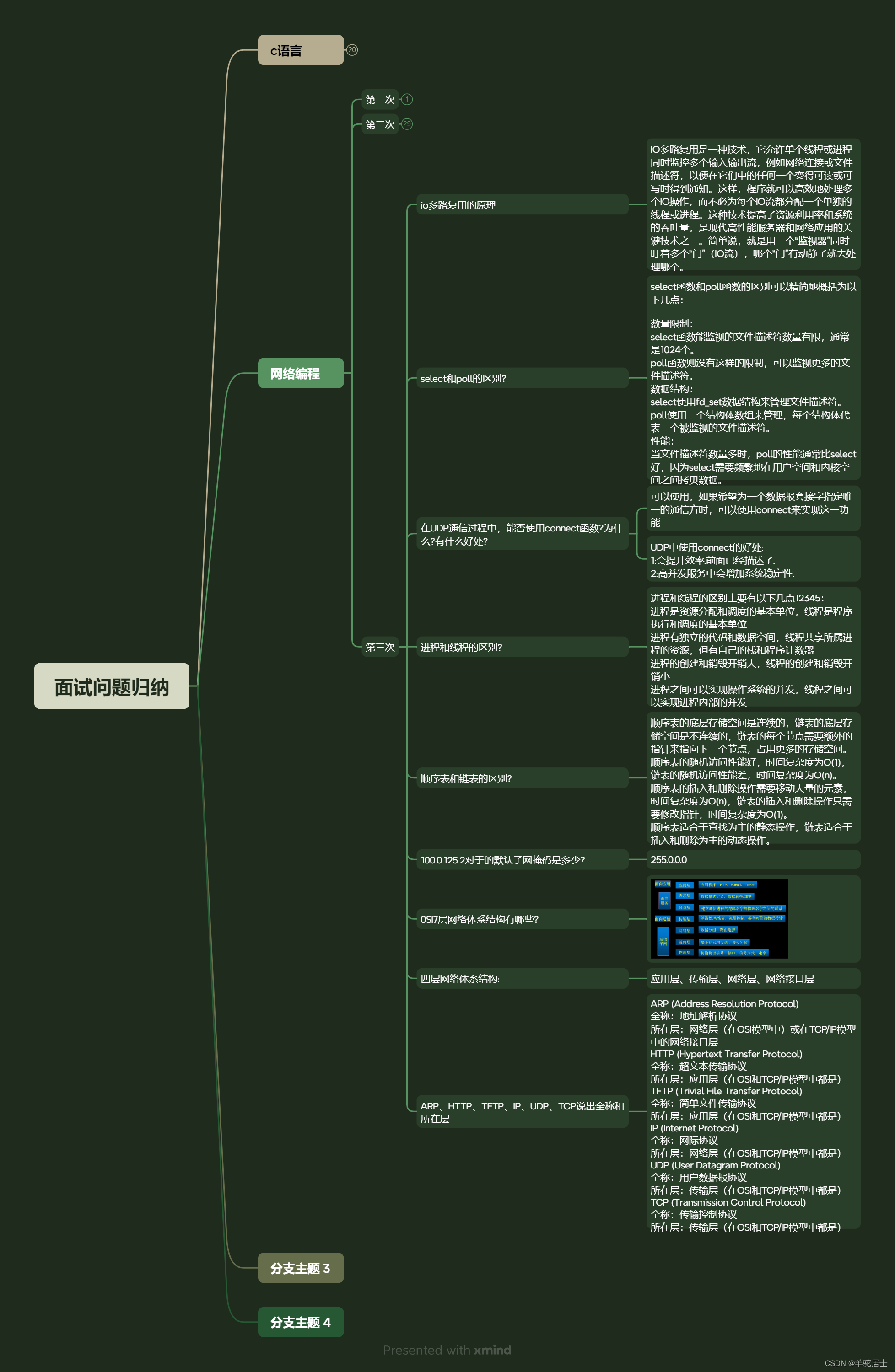
七、面试总结















 116
116











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









