






一、话题、服务模式的ROS程序设计
1、话题编程
打开终端,在catkin_ws/src路径下新建learning_communication包:
cd ~/catkin_ws/src/
catkin_create_pkg learning_communication std_msgs roscpp rospy
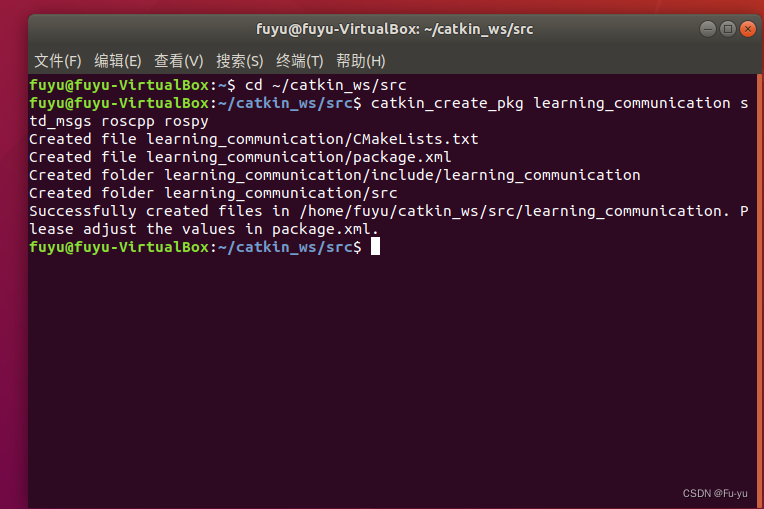
功能包格式:
catkin_create_pkg package_name depend1 depend2 depend2
package_name:功能表名称
depend1、2、3:依赖项
std_msgs:包含常见消息类型
roscpp:使用C++实现ROS各种功能
rospy:使用python实现ROS各种功能
编译功能包:
cd ~/catkin_ws
catkin_make
编译成功会显示以下图片:

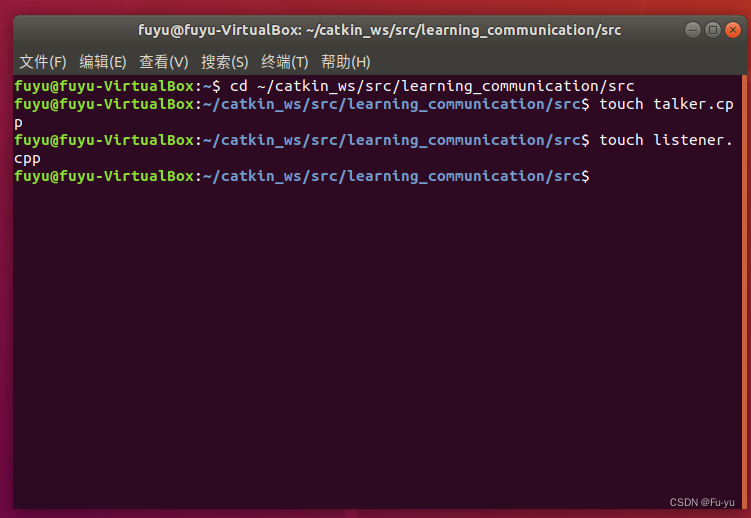
在 catkin_ws/src/learning_communication/src 中创建cpp文件,分别命名为talker.cpp 、listener.cpp:
$ cd ~/catkin_ws/src/learning_communication/src
$ touch talker.cpp
$ touch listener.cpp
编写发布者节点:
- 初始化ROS节点;
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型;
- 按照一定频率循环发布消息。
打开talker.cpp文件,实现一个发布者:
$ gedit talker.cpp
代码:
/**
* 该例程将发布chatter话题,消息类型String
*/
#include <sstream>
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "talker");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::String
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化std_msgs::String类型的消息
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
// 发布消息
ROS_INFO("%s", msg.data.c_str());
chatter_pub.publish(msg);
// 循环等待回调函数
ros::spinOnce();
// 按照循环频率延时
loop_rate.sleep();
++count;
}
return 0;
}
编写订阅者节点:
- 初始化ROS节点;
- 订阅需要的话题;
- 循环等待话题消息,接收到消息后进入回调函数;
- 在回调函数中完成消息处理。
打开listener.cpp文件,实现一个订阅者:
$ gedit listener.cpp
代码:
/**
* 该例程将订阅chatter话题,消息类型String
*/
#include "ros/ros.h"
#include "std_msgs/String.h"
// 接收到订阅的消息后,会进入消息回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "listener");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallback
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
编译代码:
- 设置需要编译的代码和生成的可执行文件;
- 设置链接库;
- 设置依赖。
在 learning_communication 文件夹里面的 CMakeLists.txt 文件末尾加入几条语句:
$ cd ~/catkin_ws/src/learning_communication
$ gedit CMakeLists.txt
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})

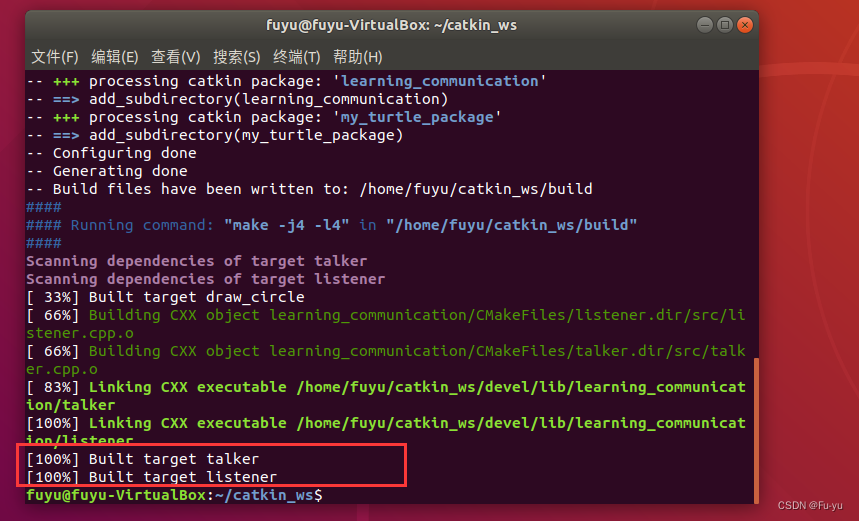
这会生成两个可执行文件, talker 和 listener,具体在:~/catkin_ws/devel/lib/learning_communication 中
编译节点:
cd ~/catkin_ws/
catkin_make
编译成功:
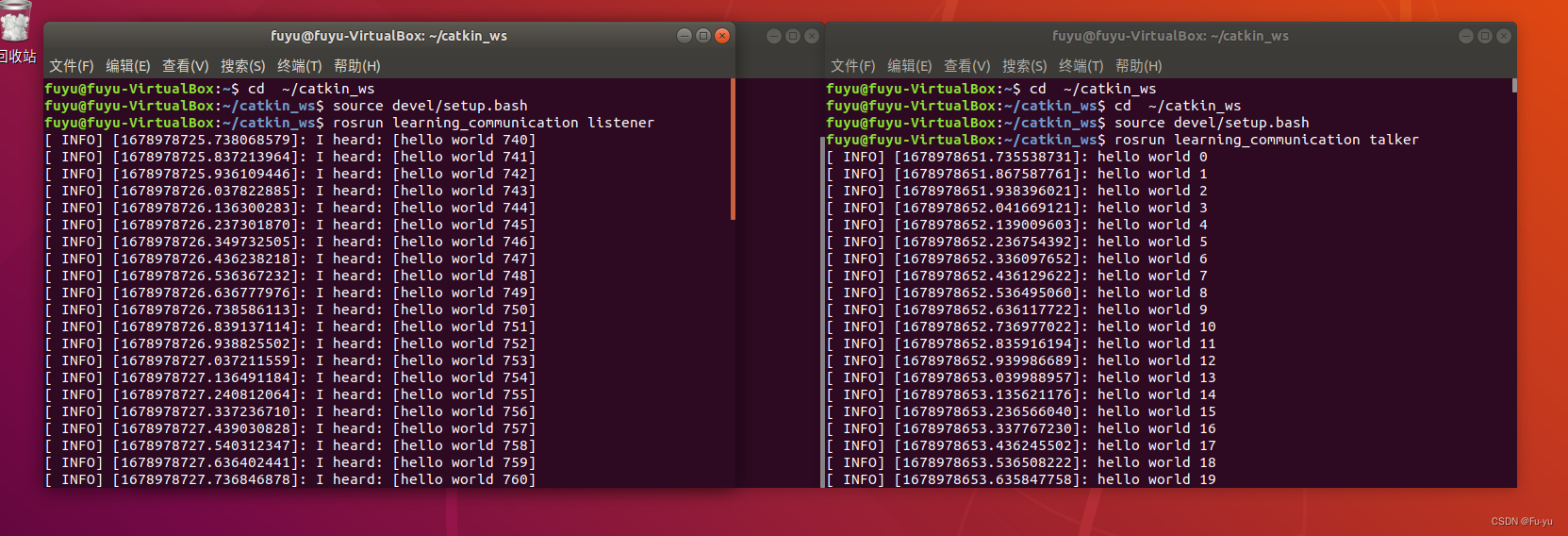
运行节点:
启动ros:
$ roscore
打开两个新的终端分别输入:
$ cd ~/catkin_ws/
$ source devel/setup.bash
$ rosrun learning_communication talker
$ cd ~/catkin_ws/
$ source devel/setup.bash
$ rosrun learning_communication listener
2、服务编程
服务编程流程:
- 创建服务器
- 创建客户端
- 添加编译选项
- 运行可执行程序
创建一个自定义消息 msg:
(1)在 catkin_ws/src/learning_communication 文件中,创建一个文件夹,命名为 msg,在这个msg文件夹里面,创建一个 .msg 文件,命名为msg.msg:
$ cd ~/catkin_ws/src/learning_communication
$ mkdir ./msg
$ cd ./msg
$ touch msg.msg
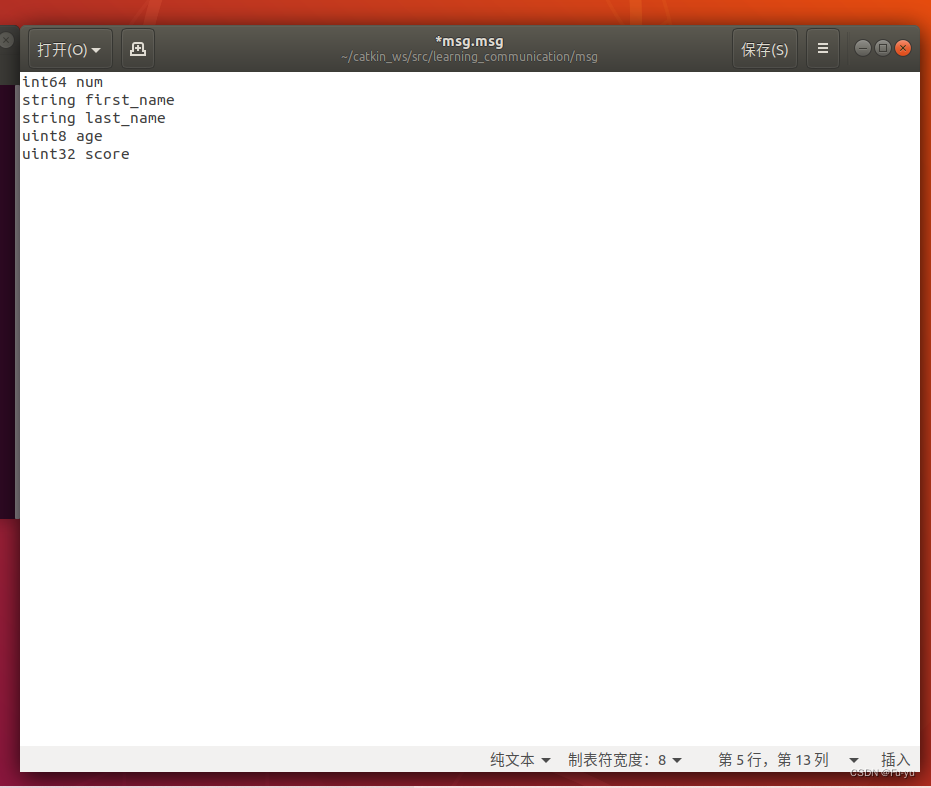
(2)打开msg.msg,复制如下内容,当然,你可以仿造上面的形式多增加几行以得到更为复杂的消息:
$ gedit msg.msg
int64 num
string first_name
string last_name
uint8 age
uint32 score
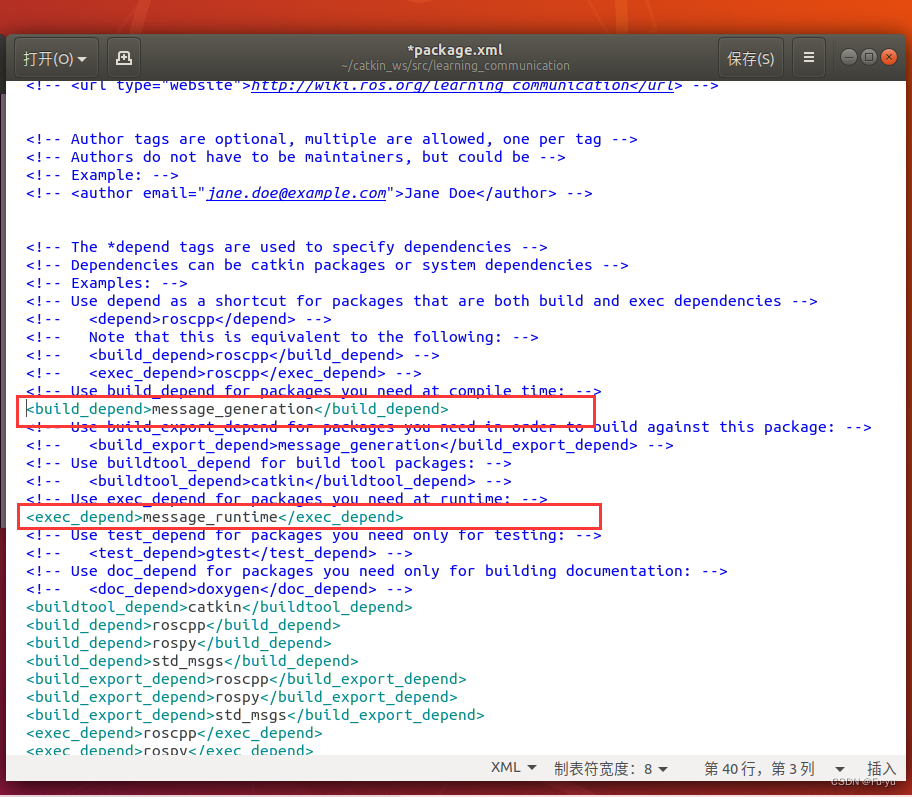
编辑 package.xml:
目的是确保msg文件被转换成为C++,Python和其他语言的源代码:
打开 catkin_ws/src/learning_communication 下的 package.xml
删除:
<!-- <build_depend>message_generation</build_depend> -->
<!-- <exec_depend>message_runtime</exec_depend> -->
这两行的 <!-- 、--> ,如下图所示:
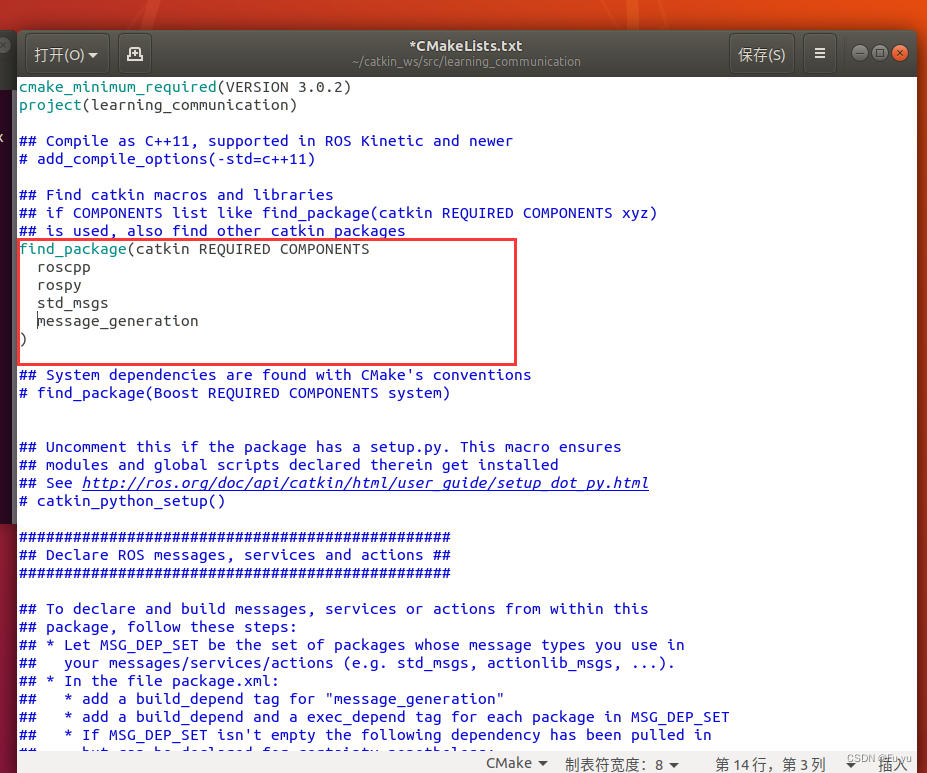
编辑CMakeLists.txt:
设置find_packag函数:
增加对 message_generation 的依赖,这样就可以生成消息了
打开 catkin_ws/src/learning_communication 下的CMakeLists.txt
在find_package()函数中加入 message_generation:
设置运行依赖:
找到如下行,并加入 message_runtime
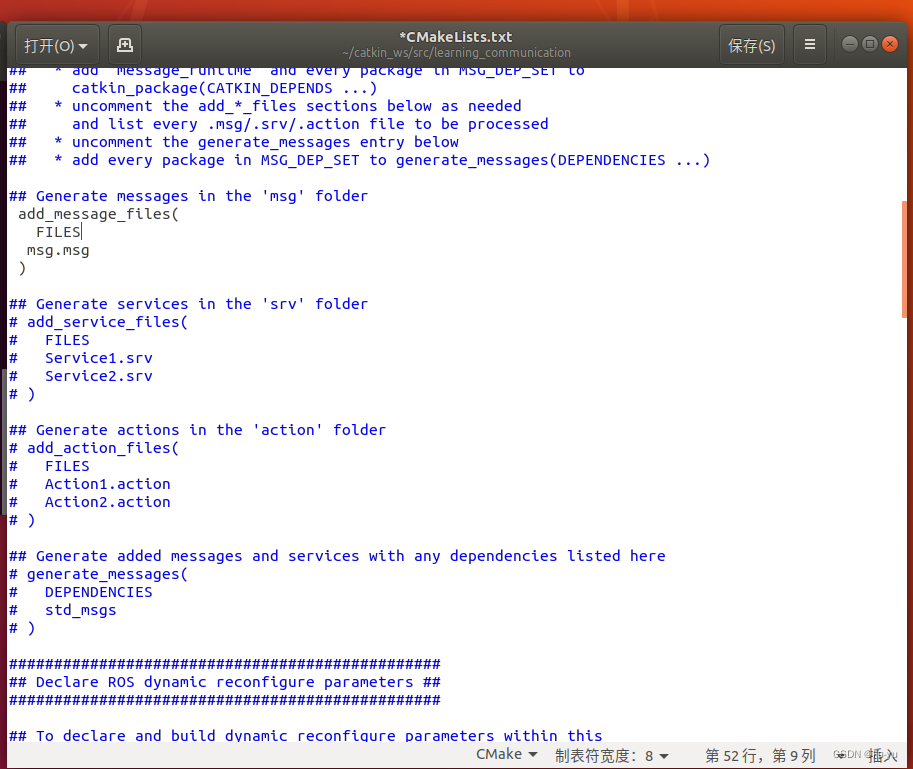
加入新消息名称:
编译:
cd ~/catkin_ws/
catkin_make
编译成功如下:
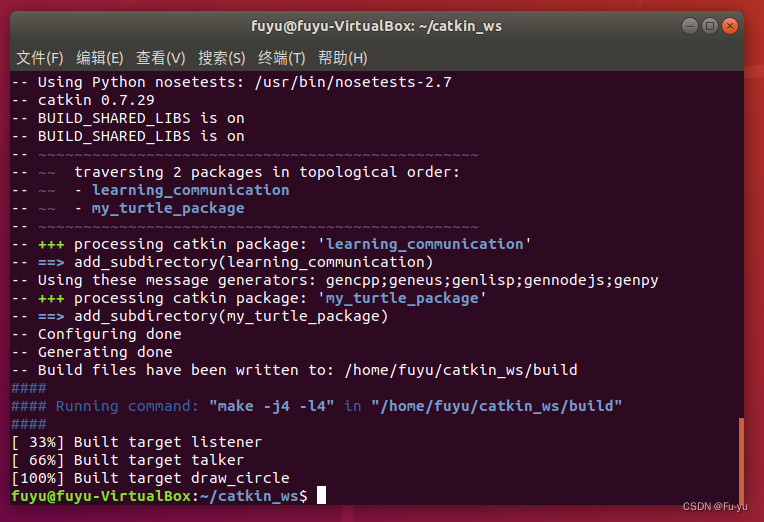
使用rosmsg:
rosmsg show msg

消息类型包含两部分:
learning_communication/msg-- 消息所在的位置
int64 num
string first_name
string last_name
uint8 age
uint32 score
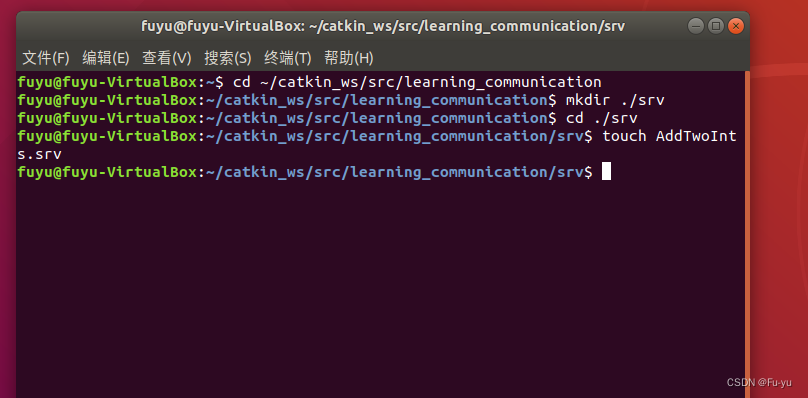
创建一个服务 srv:
(1)在 catkin_ws/src/learning_communication 文件中,创建一个文件夹,命名为 srv,在这个srv文件夹里面,创建一个 .srv 文件,命名为 AddTwoInts.srv:
$ cd ~/catkin_ws/src/learning_communication
$ mkdir ./srv
$ cd ./srv
$ touch AddTwoInts.srv
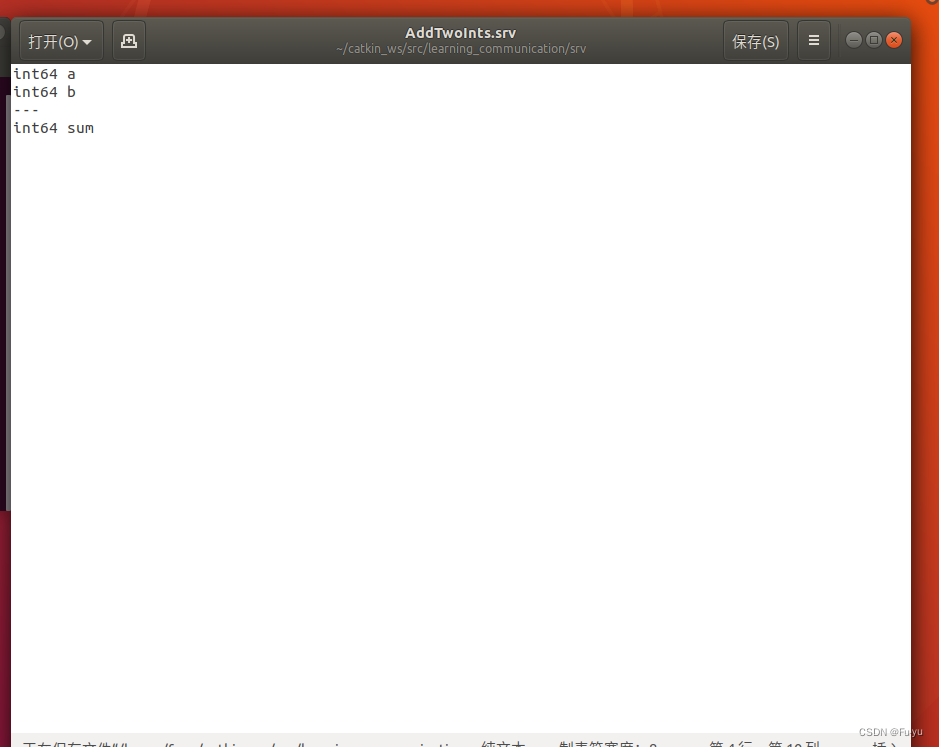
(2)打开 AddTwoInts.srv,复制如下内容
srv文件分为请求和响应两部分,由’—'分隔,其中 a 和 b 是请求, 而sum 是响应。
$ gedit AddTwoInts.srv
int64 a
int64 b
---
int64 sum
编辑 package.xml
与创建msg方法相同
编辑CMakeLists.txt
设置find_packag函数: 同创建msg
设置运行依赖:同创建msg
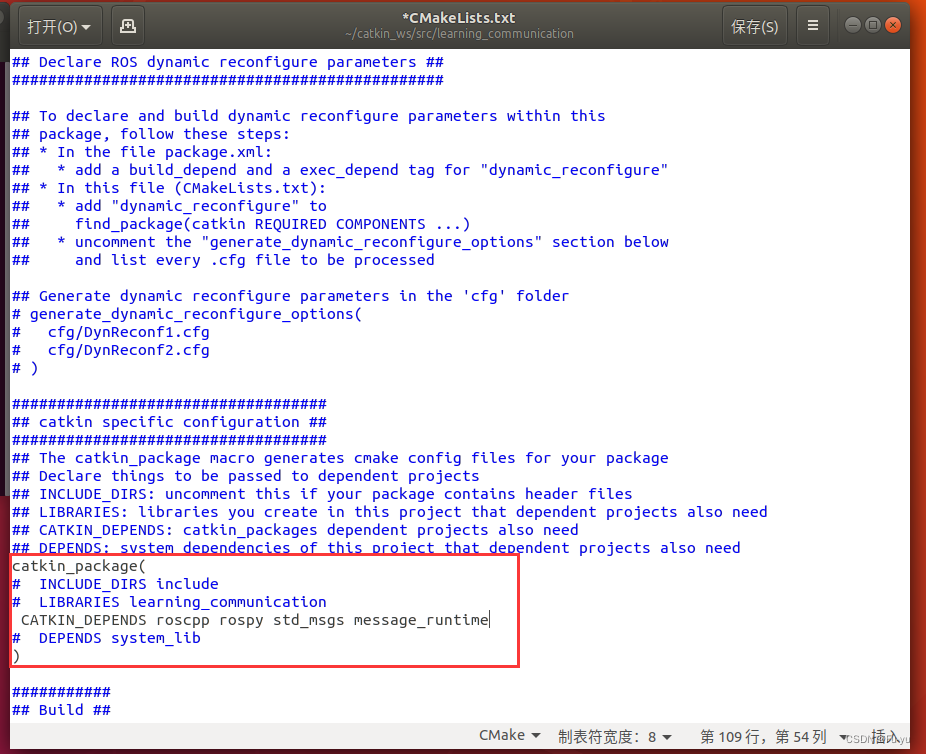
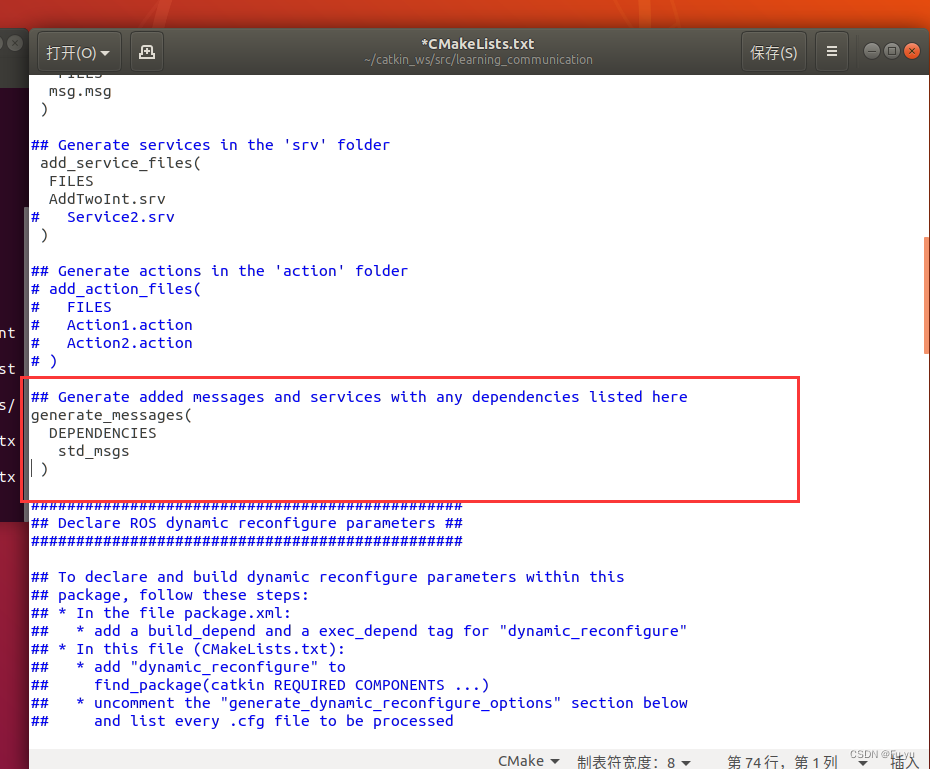
加入新消息名称:

msg和srv都需要的步骤
去掉注释并附加上所有你消息文件所依赖的那些含有.msg文件的package
(这个例子是依赖std_msgs,不要添加roscpp,rospy),结果如下:
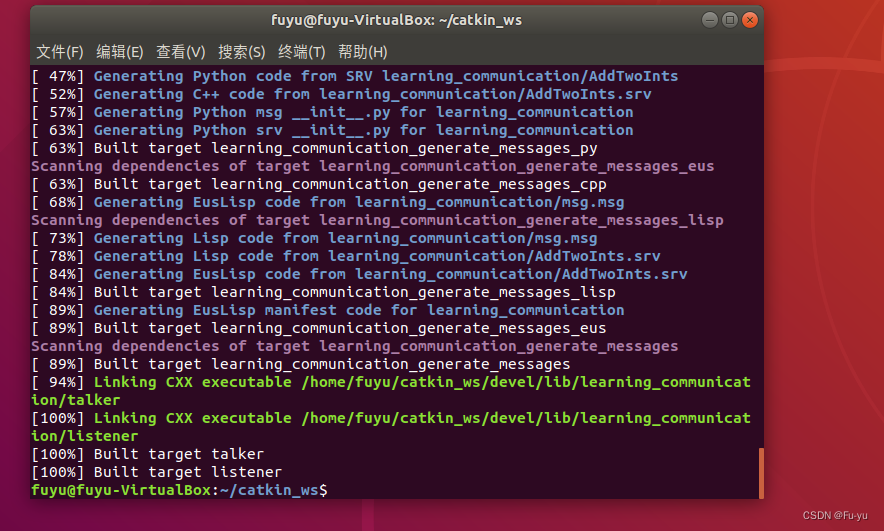
编译
cd ~/catkin_ws/
catkin_make
编译成功如下:
使用 rossrv
rossrv show learning_communication/AddTwoInts

在 catkin_ws/src/learning_communication/src 中创建cpp文件,分别命名为add_two_ints_server.cpp 、add_two_ints_client.cpp:
$ cd ~/catkin_ws/src/learning_communication/src
$ touch add_two_ints_server.cpp
$ touch add_two_ints_client.cpp
编写服务器:
- 初始化ROS节点;
- 创建Server实例;
- 循环等待服务请求,进入回调函数;
- 在回调函数中完成服务功能的处理,并反馈应答数据。
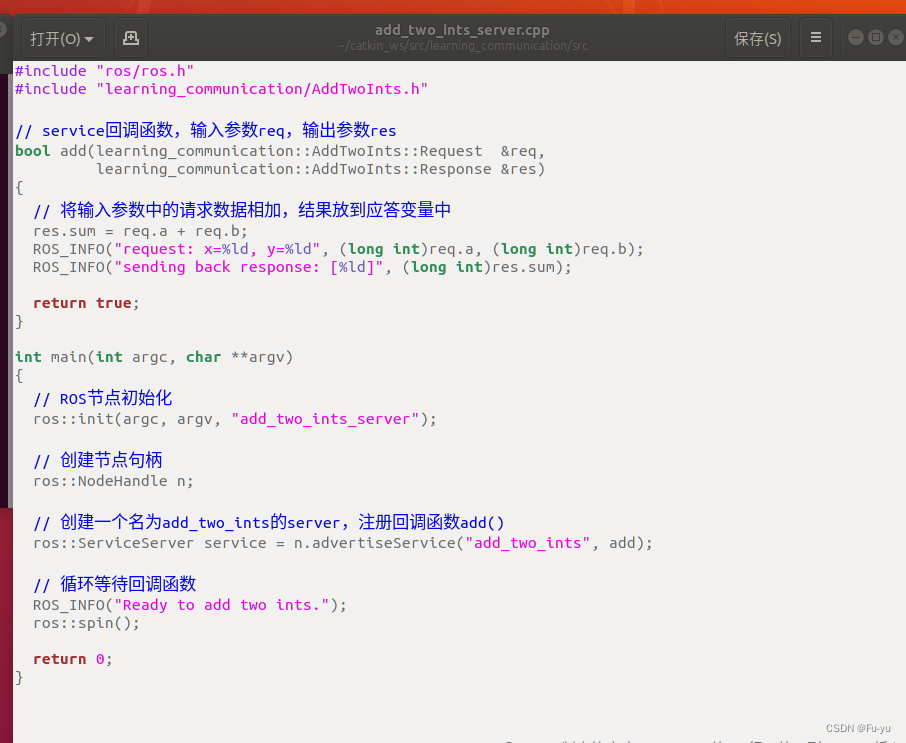
打开add_two_ints_server.cpp ,实现一个服务器:
$ gedit add_two_ints_server.cpp
代码:
#include "ros/ros.h"
#include "learning_communication/AddTwoInts.h"
// service回调函数,输入参数req,输出参数res
bool add(learning_communication::AddTwoInts::Request &req,
learning_communication::AddTwoInts::Response &res)
{
// 将输入参数中的请求数据相加,结果放到应答变量中
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "add_two_ints_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为add_two_ints的server,注册回调函数add()
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
// 循环等待回调函数
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
编写客户端:
- 初始化ROS节点;
- 创建一个Client实例;
- 发布服务请求数据;
- 等待Server处理之后的应答结果。
打开add_two_ints_client.cpp,实现一个客户端:
$ gedit add_two_ints_client.cpp
代码:
#include <cstdlib>
#include "ros/ros.h"
#include "learning_communication/AddTwoInts.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "add_two_ints_client");
// 从终端命令行获取两个加数
if (argc != 3)
{
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
// 创建节点句柄
ros::NodeHandle n;
// 创建一个client,请求add_two_int service,service消息类型是learning_communication::AddTwoInts
ros::ServiceClient client = n.serviceClient<learning_communication::AddTwoInts>("add_two_ints");
// 创建learning_communication::AddTwoInts类型的service消息
learning_communication::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
// 发布service请求,等待加法运算的应答结果
if (client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}

编译代码:
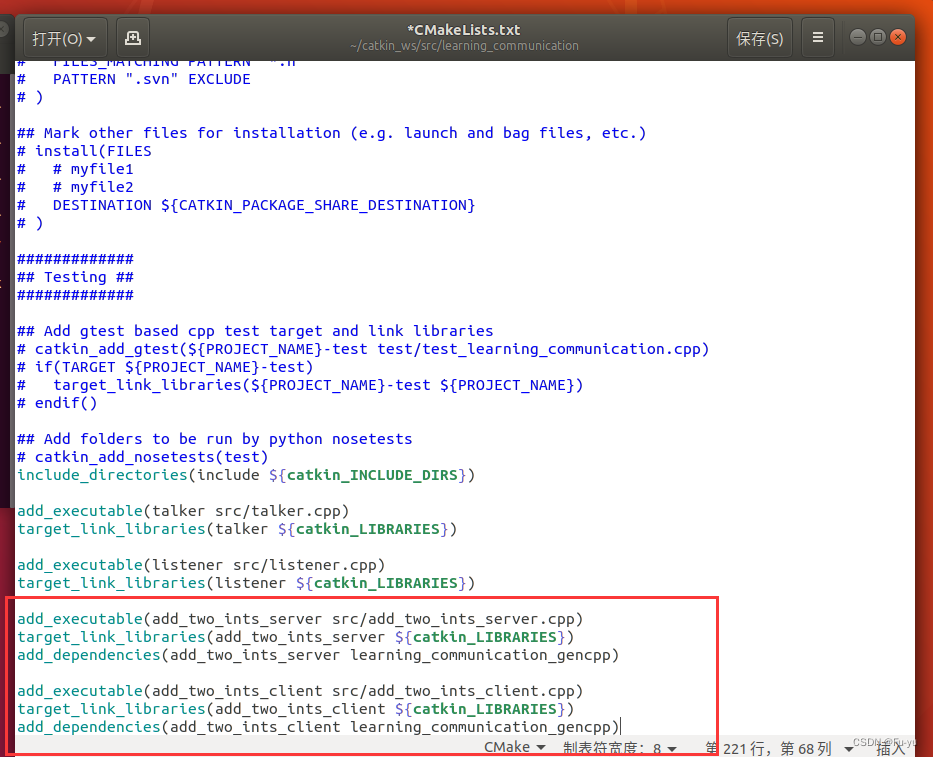
在 learning_communication 文件夹里面的 CMakeLists.txt 文件末尾加入几条语句:
这会生成两个可执行文件,add_two_ints_server和add_two_ints_client具体在:~/catkin_ws/devel/lib/learning_communication 中
$ cd ~/catkin_ws/src/learning_communication
$ gedit CMakeLists.txt
add_executable(add_two_ints_server src/add_two_ints_server.cpp)
target_link_libraries(add_two_ints_server ${catkin_LIBRARIES})
add_dependencies(add_two_ints_server learning_communication_gencpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp)
target_link_libraries(add_two_ints_client ${catkin_LIBRARIES})
add_dependencies(add_two_ints_client learning_communication_gencpp)
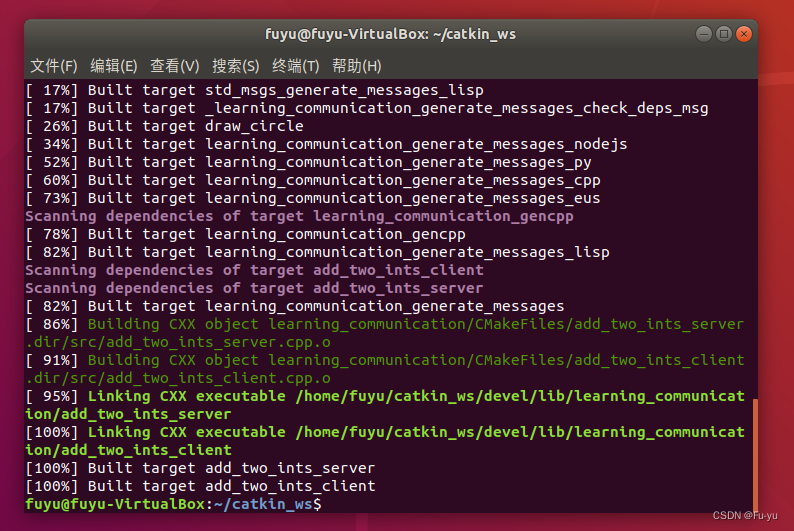
编译节点:
cd ~/catkin_ws/
catkin_make
编译成功如下:
运行节点:
启动ros:
roscore
打开两个新的终端分别运行运行Service,Client(并附带两个加数):
cd ~/catkin_ws/
source devel/setup.bash
rosrun learning_communication add_two_ints_server
cd ~/catkin_ws/
source devel/setup.bash
rosrun learning_communication add_two_ints_client 123 321

二、ROS动作编程
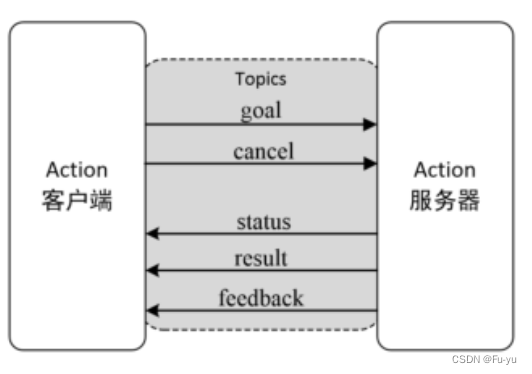
什么是动作(action):
- —种问答通信机制;
- 带有连续反馈;
- 可以在任务过程中止运行;
- 基于ROS的消息机制实现。
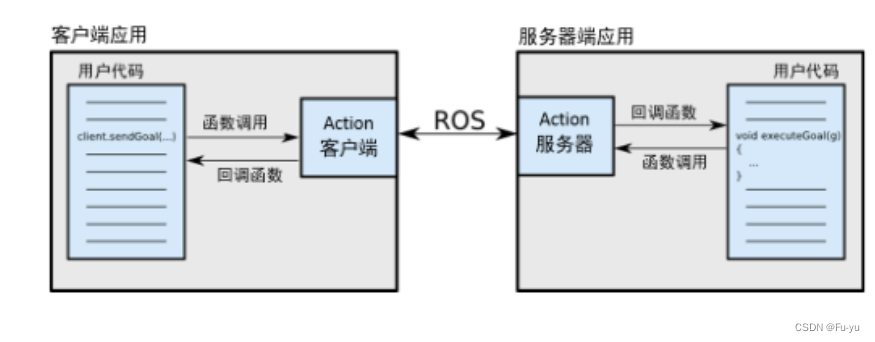
Action的接口:
- goal:发布任务目标;
- cancel:请求取消任务;
- status:通知客户端当前的状态;
- feedback:周期反馈任务运行的监控数据;
- result:向客户端发送任务的执行结果,只发布一次。
定义Action文件:
在 catkin_ws/src/learning_communication 文件中,创建一个文件夹,命名为 action,在这个action文件夹里面,创建一个 .action 文件,命名为DoDishes.action:
$ cd ~/catkin_ws/src/learning_communication
$ mkdir ./action
$ cd ./action
$ touch DoDishes.action

DoDishes.action代码如下:
$ gedit DoDishes.action
#定义目标信息
uint32 dishwasher_id
---
#定义结果信息
uint32 total_dishes_cleaned
---
#定义周期反馈的消息
float32 percent_complete

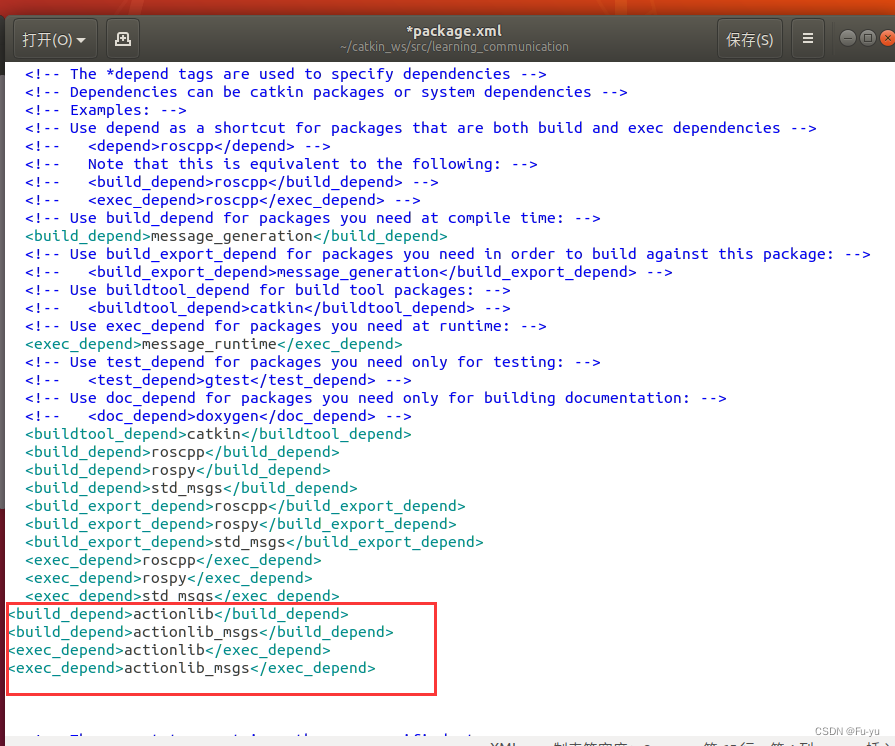
编辑 package.xml:
打开 catkin_ws/src/learning_communication 下的 package.xml,添加以下代码:
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>
编辑CMakeLists.txt:
打开 catkin_ws/src/learning_communication 下的CMakeLists.txt:
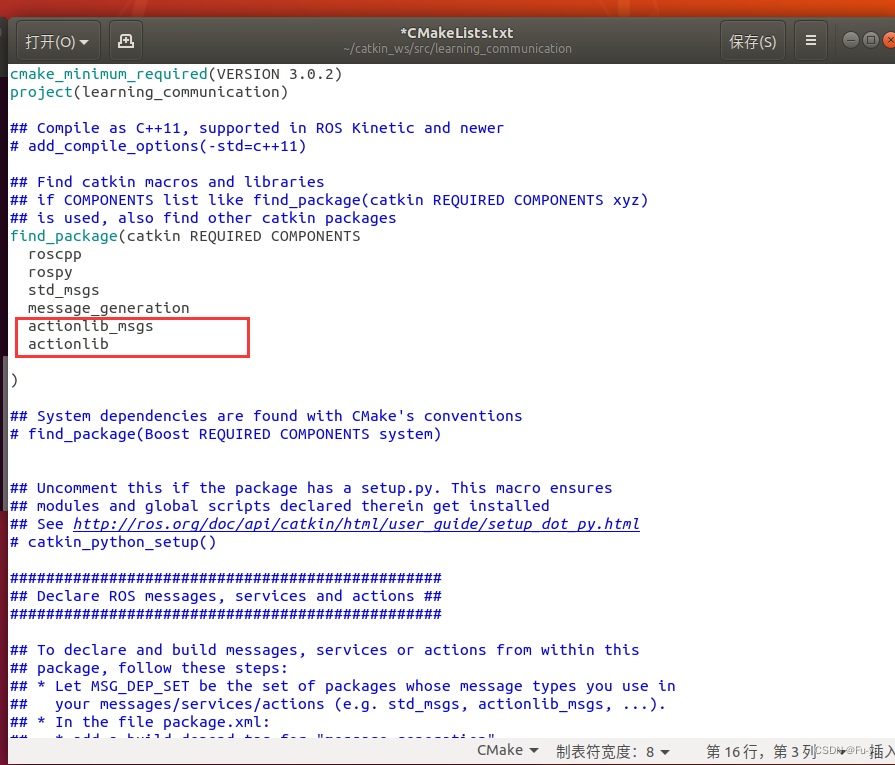
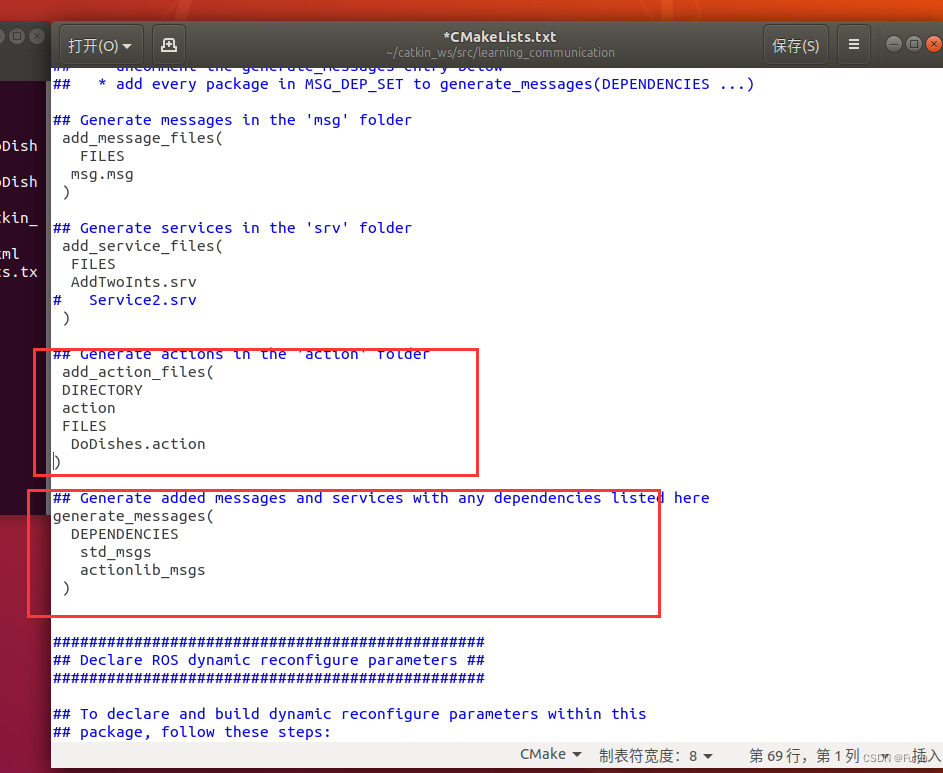
添加 actionlib_msgs 和actionlib功能包,输入
add_action_files(DIRECTORY action FILES DoDishes.action)
generate_messages(DEPENDENCIES std_msgs actionlib_msgs)
编译:
$ cd ~/catkin_ws/
$ catkin_make
编译成功:
实现一个动作服务器:
- 初始化ROS节点;
- 创建动作服务器实例;
- 启动服务器,等待动作请求;在回调函数中完成动作服务功能的处理,并反馈进度信息;
- 动作完成,发送结束信息。
在 catkin_ws/src/learning_communication/src 中创建cpp文件,命名为DoDishes_server.cpp:
$ cd ~/catkin_ws/src/learning_communication/src
$ touch DoDishes_server.cpp
$ gedit DoDishes_server.cpp
DoDishes_server.cpp代码:
#include "ros/ros.h"
#include "actionlib/server/simple_action_server.h"
#include "learning_communication/DoDishesAction.h"
typedef actionlib::SimpleActionServer<learning_communication::DoDishesAction> Server;
// 收到action的goal后调用该回调函数
void execute(const learning_communication::DoDishesGoalConstPtr &goal, Server *as)
{
ros::Rate r(1);
learning_communication::DoDishesFeedback feedback;
ROS_INFO("Dishwasher %d is working.", goal->dishwasher_id);
// 假设洗盘子的进度,并且按照1Hz的频率发布进度feedback
for(int i = 1; i <= 10; i++)
{
feedback.percent_complete = i * 10;
as->publishFeedback(feedback);
r.sleep();
}
// 当action完成后,向客户端返回结果
ROS_INFO("Dishwasher %d finish working.", goal->dishwasher_id);
as->setSucceeded();
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "do_dishes_server");
ros::NodeHandle hNode;
// 定义一个服务器
Server server(hNode, "do_dishes", boost::bind(&execute, _1, &server), false);
// 服务器开始运行
server.start();
ros::spin();
return 0;
}
实现一个动作客户端:
- 初始化ROS节点;
- 创建动作客户端实例;
- 连接动作服务端;
- 发送动作目标;
- 根据不同类型的服务端反馈处理回调函数。
在 catkin_ws/src/learning_communication/src 中创建cpp文件,命名为DoDishes_client.cpp:
$ touch DoDishes_client.cpp
$ gedit DoDishes_client.cpp
DoDishes_client.cpp代码:
#include "ros/ros.h"
#include "actionlib/client/simple_action_client.h"
#include "learning_communication/DoDishesAction.h"
typedef actionlib::SimpleActionClient<learning_communication::DoDishesAction> Client;
// 当action完成后会调用该回调函数一次
void doneCallback(const actionlib::SimpleClientGoalState &state
, const learning_communication::DoDishesResultConstPtr &result)
{
ROS_INFO("Yay! The dishes are now clean");
ros::shutdown();
}
// 当action激活后会调用该回调函数一次
void activeCallback()
{
ROS_INFO("Goal just went active");
}
// 收到feedback后调用该回调函数
void feedbackCallback(const learning_communication::DoDishesFeedbackConstPtr &feedback)
{
ROS_INFO("percent_complete : %f", feedback->percent_complete);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "do_dishes_client");
// 定义一个客户端
Client client("do_dishes", true);
// 等待服务器端
ROS_INFO("Waiting for action server to start.");
client.waitForServer();
ROS_INFO("Action server started, sending goal.");
// 创建一个 action 的 goal
learning_communication::DoDishesGoal goal;
goal.dishwasher_id = 1;
// 发送action的goal给服务端,并且设置回调函数
client.sendGoal(goal, &doneCallback, &activeCallback, &feedbackCallback);
ros::spin();
return 0;
}
编译代码:
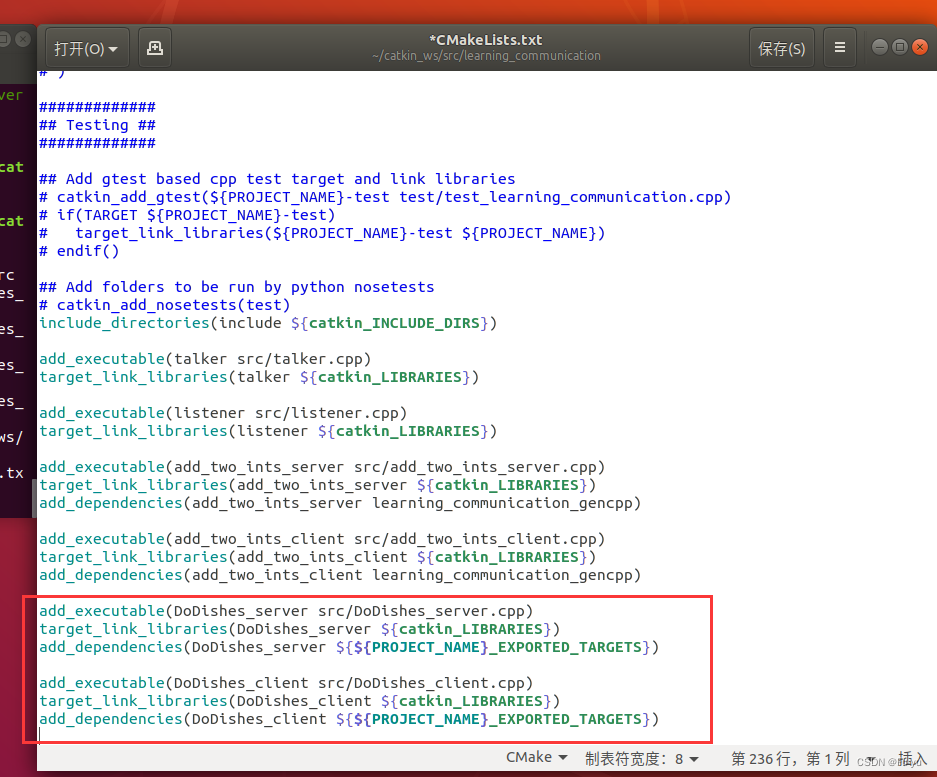
在 learning_communication 文件夹里面的 CMakeLists.txt 文件末尾加入几条语句:
这会生成两个可执行文件,DoDishes_server和DoDishes_client具体在:~/catkin_ws/devel/lib/learning_communication 中
$ cd ~/catkin_ws/src/learning_communication
$ gedit CMakeLists.txt
add_executable(DoDishes_server src/DoDishes_server.cpp)
target_link_libraries(DoDishes_server ${catkin_LIBRARIES})
add_dependencies(DoDishes_server ${${PROJECT_NAME}_EXPORTED_TARGETS})
add_executable(DoDishes_client src/DoDishes_client.cpp)
target_link_libraries(DoDishes_client ${catkin_LIBRARIES})
add_dependencies(DoDishes_client ${${PROJECT_NAME}_EXPORTED_TARGETS})
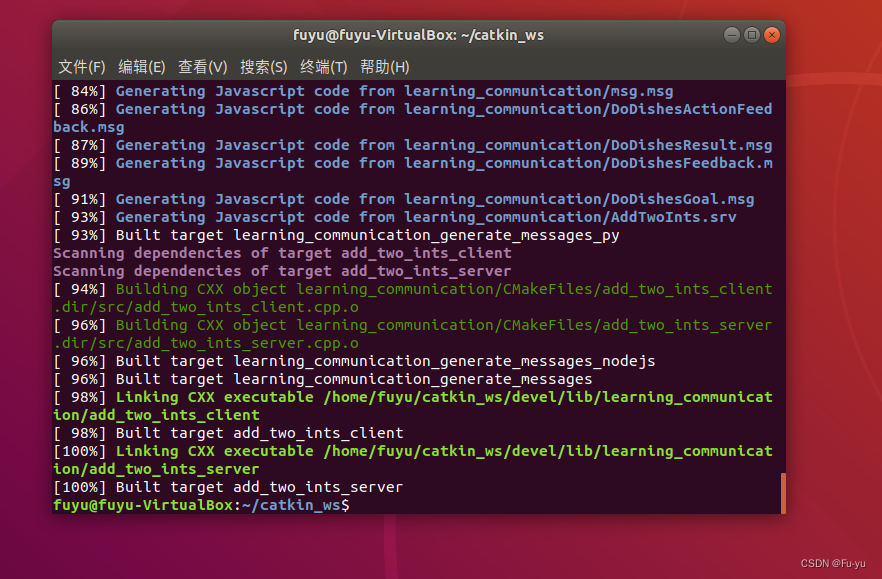
编译节点:
cd ~/catkin_ws/
catkin_make
编译成功如下:

运行节点:
打开三个终端分别执行:
roscore
rosrun learning_communication DoDishes_client
rosrun learning_communication DoDishes_server

三、分布式通信
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合。
查看主机以及从机的ip地址:
ifconfig
主机ip地址:
10.60.241.234
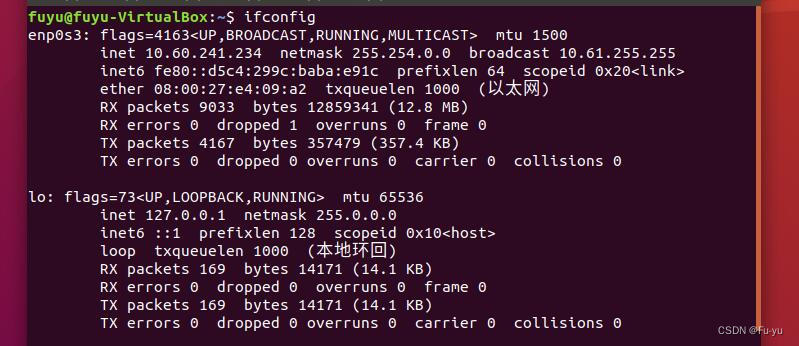
从机ip地址:
10.60.241.250
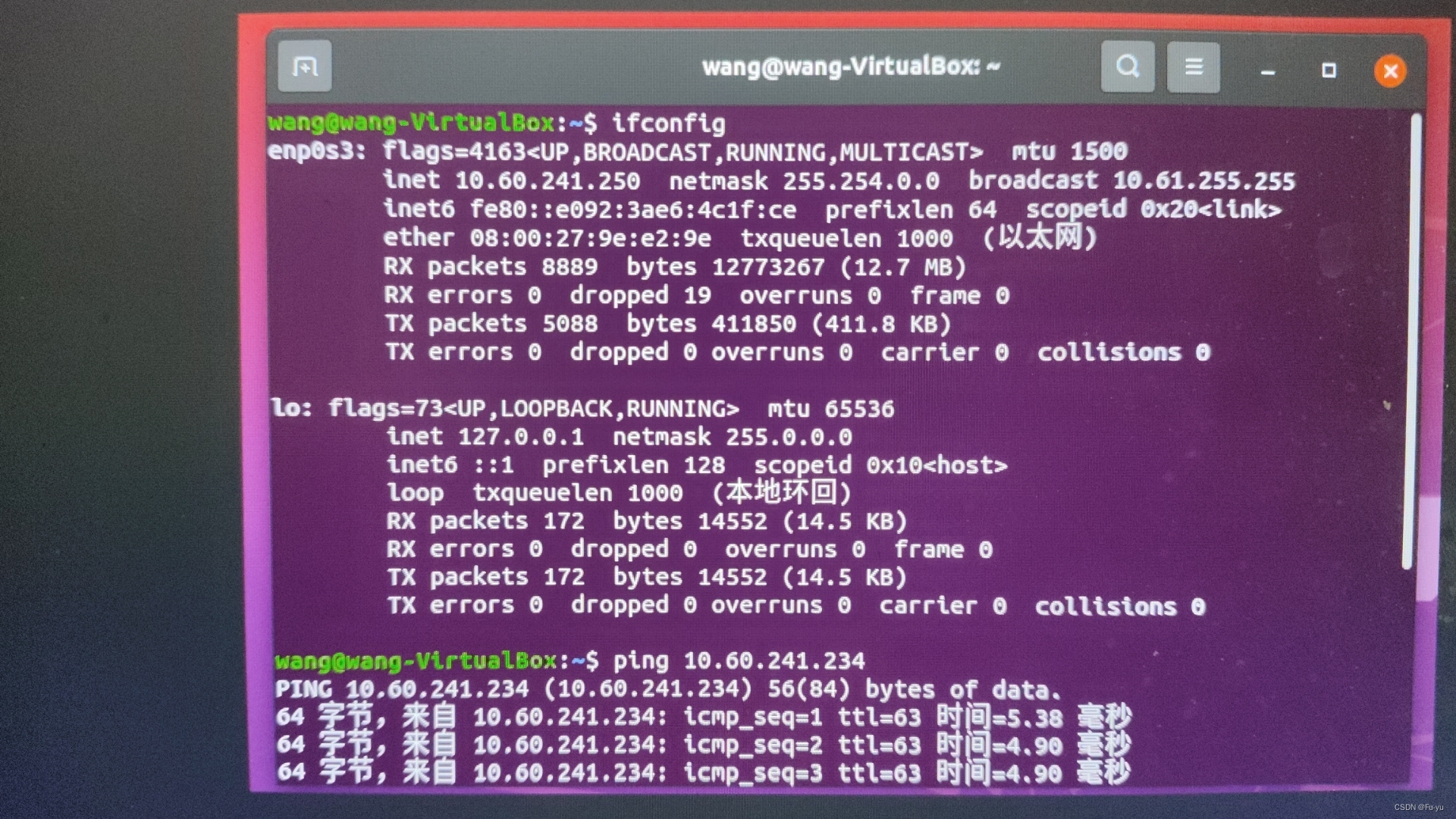
验证主机和从机是否互通:
主机ping从机:

从机ping主机:
分布式通信(主机):
打开一个终端启动ros:
roscore
打开一个新的终端
export ROS_IP=10.60.241.234 (主机的IP)
export ROS_MASTER_URI=http://10.60.241.234:11311/
rosrun turtlesim turtlesim_node __name:=my_turtle
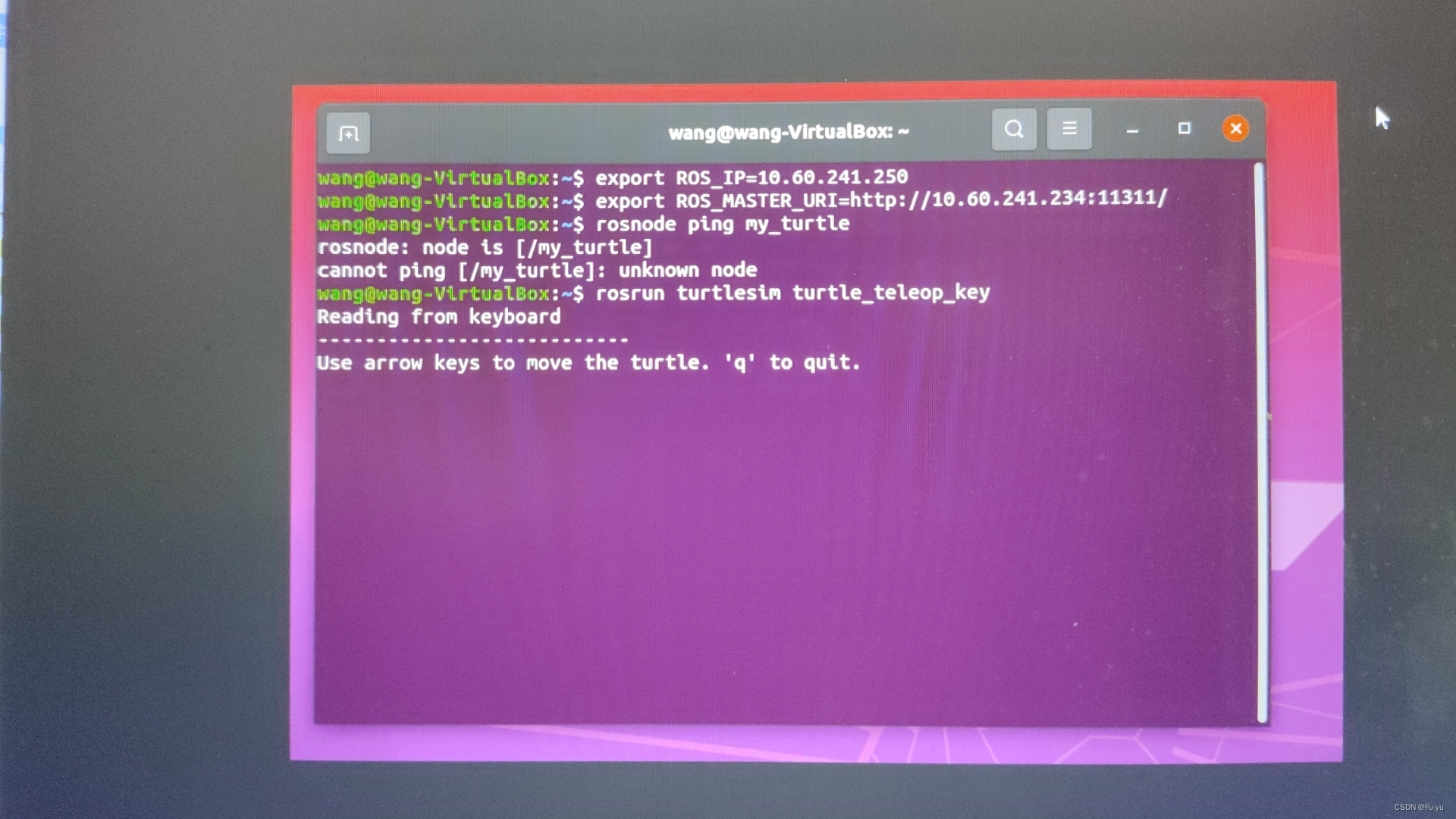
分布式通信(从机):
打开终端输入:
export ROS_IP=10.60.241.250 (该电脑ip)
export ROS_MASTER_URI=http://10.60.241.234:11311/(主机地址)
rosrun turtlesim turtle_teleop_key
配置成功,此时在从机移动键盘,主机的小海龟会实现移动

总结
本次通过对ROS话题、服务、动作模式编程程序设计以及并实践,在编译代码时需要设置需要编译的代码和生成的可执行文件、链接库以及依赖。在做分布式通信时将自己的电脑作为主机,室友的虚拟机作为从机来完成,在本次联系中遇到很多问题,例如需要配置虚拟机的ip,收获颇多。
https://blog.csdn.net/xiongmingkang/article/details/81203329














 2361
2361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









