









<一>总览
MindSpore支持保存两种类型的数据:训练参数和网络模型(模型中包含参数信息)。
-
训练参数指的是Checkpoint格式文件。
-
网络模型包括MindIR、AIR和ONNX三种格式文件。
下面介绍一下这几种格式的基本概念及其应用场景。
-
Checkpoint
-
采用了Protocol Buffers格式,存储了网络中所有的参数值。
-
一般用于训练任务中断后恢复训练,或训练后的微调(Fine Tune)任务。
-
-
MindIR
-
全称MindSpore IR,是MindSpore的一种基于图表示的函数式IR,定义了可扩展的图结构以及算子的IR表示。
-
它消除了不同后端的模型差异,一般用于跨硬件平台执行推理任务。
-
-
ONNX
-
全称Open Neural Network Exchange,是一种针对机器学习模型的通用表达。
-
一般用于不同框架间的模型迁移或在推理引擎(TensorRT)上使用
-
-
AIR
-
全称Ascend Intermediate Representation,是华为定义的针对机器学习所设计的开放式文件格式。
-
它能更好地适应华为AI处理器,一般用于Ascend 310上执行推理任务。
-
<二> 推理
总体步骤:
开发环境准备,Python3.7.5 ,ubuntu 18.04.5 x86_64,配套开发软件包 CNN、mindx_sdk等。
导出AIR模型文件
使用ATC工具将AIR模型文件转成OM模型。
编译推理代码,生成可执行
main文件。加载保存的OM模型,执行推理并查看结果。
(1)离线模型转换
总体流程:Checkpoint---->lenet.air----->om
使用ATC工具将air文件转换为om文件
model_path=$1
output_model_name=$2
/usr/local/Ascend/atc/bin/atc \
--model=$model_path \
--mode=0 \
--framework=1 \
--output=$output_model_name \
--input_format=NCHW \
--soc_version=Ascend310 \参数说明:
--mode=0 0表示转为离线om模型
--model 待转文件路径与文件名。
--framework=1 原始框架类型,1为mindspore
--output 存放转换后的离线模型的路径以及文件名
--soc_version 模型转换时指定芯片版本(一定要指名,刚开始没填写,一直报错)
命令运行脚本 bash air2om.sh ./ww.air ../mxbase/models/lenet
最终结果:得到om模型文件
其他Caffe、Tensorflow等框架的转换方式以及配置参数,见昇腾CANN社区版
(2)MxBase推理过程
大致目录结构:不同模型有所不同
├── data
├── config # 模型配置信息
├── coco.names # 数据集类别
├── infer.txt # 保存推理图片路径
├── images # 推理图片
├── 1.jpg
├── 2.jpg
├── 3.jpg
......
├── model # 保存模型文件
├── model_tf_aipp.om
├── mxbase
├── main.cpp # 推理启动脚本
├── modelDetection.h # 模型推理.h文件
├── modelDetection.cpp # 模型推理脚本
├── CMakeLists.txt # Cmake编译文件
├── build.sh # 编译脚本2.1、build.sh编译脚本:设置编译环境,需要根据本地机子实际环境做修改
#!/bin/bash
# Copyright 2020 Huawei Technologies Co., Ltd
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
path_cur=$(dirname $0)
echo "now_path:${path_cur}"
echo "ASCEND_VERSION:${ASCEND_VERSION}"
function check_env()
{
# set ASCEND_VERSION to ascend-toolkit/latest when it was not specified by user
if [ ! "${ASCEND_VERSION}" ]; then
export ASCEND_VERSION=nnrt/latest
echo "Set ASCEND_VERSION to the default value: ${ASCEND_VERSION}"
else
echo "ASCEND_VERSION is set to ${ASCEND_VERSION} by user"
fi
if [ ! "${ARCH_PATTERN}" ]; then
# set ARCH_PATTERN to ./ when it was not specified by user
export ARCH_PATTERN=./
echo "ARCH_PATTERN is set to the default value: ${ARCH_PATTERN}"
else
echo "ARCH_PATTERN is set to ${ARCH_PATTERN} by user"
fi
}
function build_lenet()
{
cd $path_cur
rm -rf build
mkdir -p build
cd build
cmake ..
make
ret=$?
if [ ${ret} -ne 0 ]; then
echo "Failed to build lenet."
exit ${ret}
fi
make install
}
check_env
build_lenet2.2、 CMakeLists.txt编译文件:根据实际情况做修改
cmake_minimum_required(VERSION 3.14.1)
project(lenet)
set(TARGET lenet)
add_definitions(-DENABLE_DVPP_INTERFACE)
add_compile_options(-std=c++11 -fPIE -fstack-protector-all -fPIC -Wall)
add_link_options(-Wl,-z,relro,-z,now,-z,noexecstack -pie)
# 检查环境变量
if(NOT DEFINED ENV{ASCEND_HOME})
message(FATAL_ERROR "please define environment variable:ASCEND_HOME")
endif()
if(NOT DEFINED ENV{ASCEND_VERSION})
message(WARNING "please define environment variable:ASCEND_VERSION")
endif()
if(NOT DEFINED ENV{ARCH_PATTERN})
message(WARNING "please define environment variable:ARCH_PATTERN")
endif()
set(ACL_INC_DIR $ENV{ASCEND_HOME}/$ENV{ASCEND_VERSION}/acllib/include)
set(ACL_LIB_DIR $ENV{ASCEND_HOME}/$ENV{ASCEND_VERSION}/acllib/lib64)
set(MXBASE_ROOT_DIR $ENV{MX_SDK_HOME})
set(MXBASE_INC ${MXBASE_ROOT_DIR}/include)
set(MXBASE_LIB_DIR ${MXBASE_ROOT_DIR}/lib)
set(MXBASE_POST_LIB_DIR ${MXBASE_ROOT_DIR}/lib/modelpostprocessors)
set(MXBASE_POST_PROCESS_DIR ${MXBASE_INC}/MxBase/postprocess/include)
if(DEFINED ENV{MXSDK_OPENSOURCE_DIR})
set(OPENSOURCE_DIR $ENV{MXSDK_OPENSOURCE_DIR})
else()
set(OPENSOURCE_DIR ${MXBASE_ROOT_DIR}/opensource)
endif()
#包含编译需要用到的目录
include_directories(${ACL_INC_DIR})
include_directories(${OPENSOURCE_DIR}/include)
include_directories(${OPENSOURCE_DIR}/include/opencv4)
include_directories(${MXBASE_INC})
include_directories(${MXBASE_POST_PROCESS_DIR})
link_directories(${ACL_LIB_DIR})
link_directories(${OPENSOURCE_DIR}/lib)
link_directories(${MXBASE_LIB_DIR})
link_directories(${MXBASE_POST_LIB_DIR})
#设置主执行文件
add_executable(${TARGET} main.cpp)
#target_link_libraries(${TARGET} glog cpprest mxbase opencv_world)
install(TARGETS ${TARGET} RUNTIME DESTINATION ${PROJECT_SOURCE_DIR}/)2.3、推理脚本
2.3.1 主函数启动脚本 main_opencv.cpp
作用:初始化模型配置所需参数,加载图片供后续推理
#include "MxBase/Log/Log.h"
#include <dirent.h>
#include "LenetOpencv.h"
namespace {
const uint32_t CLASS_NUM = 10;
} // namespace
APP_ERROR ScanImages(const std::string &path, std::vector<std::string> &imgFiles)
{
DIR *dirPtr = opendir(path.c_str());
if (dirPtr == nullptr) {
LogError << "opendir failed. dir:" << path;
return APP_ERR_INTERNAL_ERROR;
}
dirent *direntPtr = nullptr;
while ((direntPtr = readdir(dirPtr)) != nullptr) {
std::string fileName = direntPtr->d_name;
if (fileName == "." || fileName == "..") {
continue;
}
imgFiles.emplace_back(path + "/" + fileName);
}
closedir(dirPtr);
return APP_ERR_OK;
}
int main(int argc, char* argv[]){
if (argc <= 1) {
LogError << "Please input image path, such as './lenet image_dir'.";
return APP_ERR_OK;
}
InitParam initParam = {};
initParam.deviceId = 0;
initParam.classNum = CLASS_NUM;
initParam.checkTensor = true;
initParam.modelPath = "../models/lenet.om";
auto lenet = std::make_shared<LenetOpencv>();
APP_ERROR ret = lenet->Init(initParam);
if (ret != APP_ERR_OK) {
LogError << "Lenet init failed, ret=" << ret << ".";
return ret;
}else{
LogError<<"Lenet init success";
}
std::string imgPath = argv[1];
std::vector<std::string> imgFilePaths;
ret = ScanImages(imgPath, imgFilePaths);
auto startTime = std::chrono::high_resolution_clock::now();
for (auto &imgFile : imgFilePaths) {
ret = lenet->Process(imgFile);
if (ret != APP_ERR_OK) {
LogError << "lenet process failed, ret=" << ret << ".";
lenet->DeInit();
return ret;
}
}
auto endTime = std::chrono::high_resolution_clock::now();
lenet->DeInit();
double costMilliSecs = std::chrono::duration<double, std::milli>(endTime - startTime).count();
double fps = 1000.0 * imgFilePaths.size() / lenet->GetInferCostMilliSec();
LogInfo << "[Process Delay] cost: " << costMilliSecs << " ms\tfps: " << fps << " imgs/sec";
return APP_ERR_OK;
}
2.3.2 模型推理脚本和 .h文件
作用:模型推理具体实现代码
#LenetOpencv.cpp文件
#include "LenetOpencv.h"
#include "MxBase/DeviceManager/DeviceManager.h"
#include "MxBase/Log/Log.h"
#include "MxBase/ConfigUtil/ConfigUtil.h"
using namespace MxBase;
namespace {
const uint32_t YUV_BYTE_NU = 3;
const uint32_t YUV_BYTE_DE = 2;
const uint32_t VPC_H_ALIGN = 2;
}
APP_ERROR LenetOpencv::Init(const InitParam &initParam)
{
deviceId_ = initParam.deviceId;
APP_ERROR ret = MxBase::DeviceManager::GetInstance()->InitDevices();
if (ret != APP_ERR_OK) {
LogError << "Init devices failed, ret=" << ret << ".";
return ret;
}
ret = MxBase::TensorContext::GetInstance()->SetContext(initParam.deviceId);
if (ret != APP_ERR_OK) {
LogError << "Set context failed, ret=" << ret << ".";
return ret;
}
dvppWrapper_ = std::make_shared<MxBase::DvppWrapper>();
ret = dvppWrapper_->Init();
if (ret != APP_ERR_OK) {
LogError << "DvppWrapper init failed, ret=" << ret << ".";
return ret;
}
model_ = std::make_shared<MxBase::ModelInferenceProcessor>();
ret = model_->Init(initParam.modelPath, modelDesc_);
if (ret != APP_ERR_OK) {
LogError << "ModelInferenceProcessor init failed, ret=" << ret << ".";
return ret;
}
MxBase::ConfigData configData;
const std::string checkTensor = initParam.checkTensor ? "true" : "false";
configData.SetJsonValue("CLASS_NUM", std::to_string(initParam.classNum));
configData.SetJsonValue("CHECK_MODEL", checkTensor);
auto jsonStr = configData.GetCfgJson().serialize();
std::map<std::string, std::shared_ptr<void>> config;
return APP_ERR_OK;
}
APP_ERROR LenetOpencv::DeInit()
{
dvppWrapper_->DeInit();
model_->DeInit();
MxBase::DeviceManager::GetInstance()->DestroyDevices();
return APP_ERR_OK;
}
APP_ERROR LenetOpencv::ReadImage(const std::string &imgPath, cv::Mat &imageMat)
{
imageMat = cv::imread(imgPath, cv::IMREAD_COLOR);
return APP_ERR_OK;
}
APP_ERROR LenetOpencv::CVMatToTensorBase(const cv::Mat &imageMat, MxBase::TensorBase &tensorBase)
{
const uint32_t dataSize = imageMat.cols * imageMat.rows * YUV444_RGB_WIDTH_NU;
LogInfo << "image size " << imageMat.cols << " " << imageMat.rows;
MemoryData memoryDataDst(dataSize, MemoryData::MEMORY_DEVICE, deviceId_);
MemoryData memoryDataSrc(imageMat.data, dataSize, MemoryData::MEMORY_HOST_MALLOC);
APP_ERROR ret = MemoryHelper::MxbsMallocAndCopy(memoryDataDst, memoryDataSrc);
if (ret != APP_ERR_OK) {
LogError << GetError(ret) << "Memory malloc failed.";
return ret;
}
std::vector<uint32_t> shape = {imageMat.rows * YUV444_RGB_WIDTH_NU, static_cast<uint32_t>(imageMat.cols)};
tensorBase = TensorBase(memoryDataDst, false, shape, TENSOR_DTYPE_UINT8);
return APP_ERR_OK;
}
APP_ERROR LenetOpencv::Inference(const std::vector<MxBase::TensorBase> &inputs,
std::vector<MxBase::TensorBase> &outputs)
{
//model_ is <MxBase::ModelInferenceProcessor> object, modelDesc_ is an object which save the model_info
auto dtypes = model_->GetOutputDataType();
for (size_t i = 0; i < modelDesc_.outputTensors.size(); ++i) {
std::vector<uint32_t> shape = {};
for (size_t j = 0; j < modelDesc_.outputTensors[i].tensorDims.size(); ++j) {
shape.push_back((uint32_t)modelDesc_.outputTensors[i].tensorDims[j]);
}
TensorBase tensor(shape, dtypes[i], MemoryData::MemoryType::MEMORY_DEVICE, deviceId_);
APP_ERROR ret = TensorBase::TensorBaseMalloc(tensor);
if (ret != APP_ERR_OK) {
LogError << "TensorBaseMalloc failed, ret=" << ret << ".";
return ret;
}
outputs.push_back(tensor);
}
DynamicInfo dynamicInfo = {};
dynamicInfo.dynamicType = DynamicType::STATIC_BATCH;
auto startTime = std::chrono::high_resolution_clock::now();
APP_ERROR ret = model_->ModelInference(inputs, outputs, dynamicInfo);
auto endTime = std::chrono::high_resolution_clock::now();
double costMs = std::chrono::duration<double, std::milli>(endTime - startTime).count();// save time
inferCostTimeMilliSec += costMs;
if (ret != APP_ERR_OK) {
LogError << "ModelInference failed, ret=" << ret << ".";
return ret;
}
return APP_ERR_OK;
}
//image process
APP_ERROR LenetOpencv::Process(const std::string &imgPath)
{
cv::Mat imageMat;
APP_ERROR ret = ReadImage(imgPath, imageMat);
if (ret != APP_ERR_OK) {
LogError << "ReadImage failed, ret=" << ret << ".";
return ret;
}
std::vector<MxBase::TensorBase> inputs = {};
std::vector<MxBase::TensorBase> outputs = {};
TensorBase tensorBase;
//image ==>tensorBase
ret = CVMatToTensorBase(imageMat, tensorBase);
if (ret != APP_ERR_OK) {
LogError << "CVMatToTensorBase failed, ret=" << ret << ".";
return ret;
}
//put tensorBase to inputs
inputs.push_back(tensorBase);
auto startTime = std::chrono::high_resolution_clock::now();
//start inference for each image
ret = Inference(inputs, outputs);
auto endTime = std::chrono::high_resolution_clock::now();
double costMs = std::chrono::duration<double, std::milli>(endTime - startTime).count();// save time
inferCostTimeMilliSec += costMs;
if (ret != APP_ERR_OK) {
LogError << "Inference failed, ret=" << ret << ".";
return ret;
}
/*
//post process
std::vector<std::vector<MxBase::ClassInfo>> BatchClsInfos = {};
ret = PostProcess(outputs, BatchClsInfos);
if (ret != APP_ERR_OK) {
LogError << "PostProcess failed, ret=" << ret << ".";
return ret;
}
ret = SaveResult(imgPath, batchClsInfos);
if (ret != APP_ERR_OK) {
LogError << "Save infer results into file failed. ret = " << ret << ".";
return ret;
}
*/
return APP_ERR_OK;
}
#LenetOpencv.h头文件
#ifndef MXBASE_LENETOPENCV_H
#define MXBASE_LENETOPENCV_H
#include <opencv2/opencv.hpp>
#include "MxBase/DvppWrapper/DvppWrapper.h"
#include "MxBase/ModelInfer/ModelInferenceProcessor.h"
#include "MxBase/Tensor/TensorContext/TensorContext.h"
struct InitParam {
uint32_t deviceId;
uint32_t classNum;
bool checkTensor;
std::string modelPath;
};
class LenetOpencv{
public:
APP_ERROR Init(const InitParam &initParam);
APP_ERROR DeInit();
APP_ERROR ReadImage(const std::string &imgPath, cv::Mat &imageMat);
APP_ERROR CVMatToTensorBase(const cv::Mat &imageMat, MxBase::TensorBase &tensorBase);
APP_ERROR Inference(const std::vector<MxBase::TensorBase> &inputs, std::vector<MxBase::TensorBase> &outputs);
APP_ERROR Process(const std::string &imgPath);
// get infer time
double GetInferCostMilliSec() const {return inferCostTimeMilliSec;}
private:
std::shared_ptr<MxBase::DvppWrapper> dvppWrapper_;
std::shared_ptr<MxBase::ModelInferenceProcessor> model_;
MxBase::ModelDesc modelDesc_;
uint32_t deviceId_ = 0;
// infer time
double inferCostTimeMilliSec = 0.0;
};
#endif
2.4、编译
上述所有步骤完成就可以进行编译,执行bash build.sh
就会生成绿色字体的可执行文件。
2.5、MNIST数据集预处理,转为jpg图片
可以看我的另一篇博文
python 将MNIST数据集转为jpg图片格式_白白白-CSDN博客
2.6、运行推理服务。
./lenet image_path (参数解释:image_path 代表待推理图片的路径)。
在 “mxbase/lenet” 目录下执行推理命令,如
./lenet ../../infer_data/pre_process_image/
结果
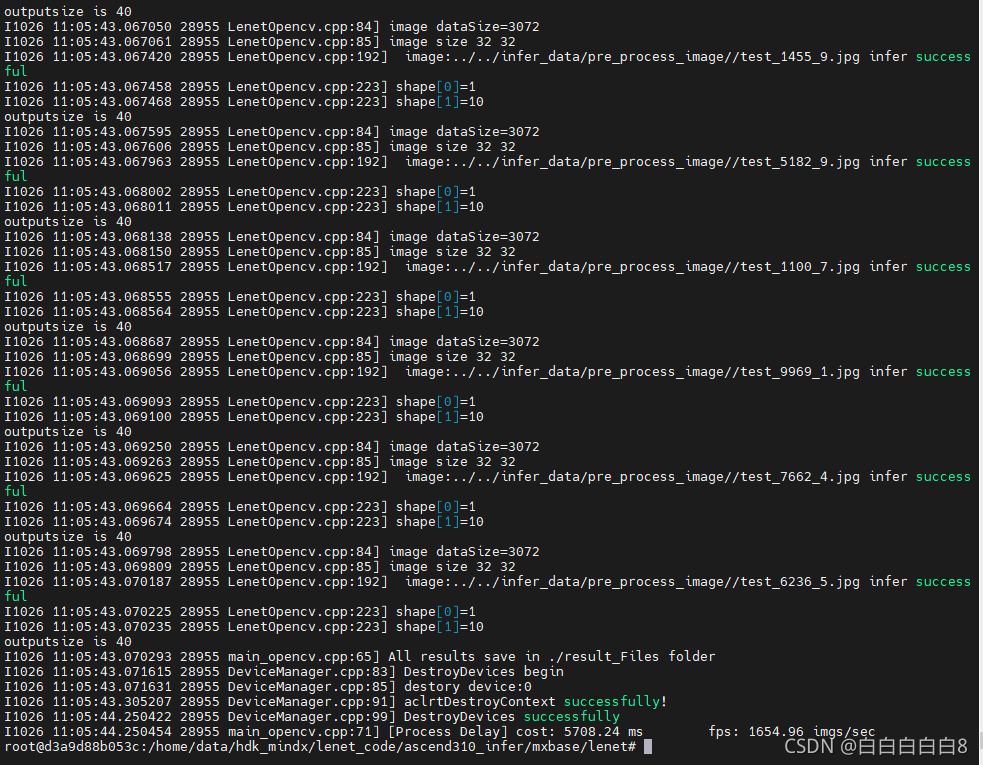
如果结果和上图一致,表明推理运行成功,所有推理结果会保存在同级目录下的 result_Files 文件夹中。
2.7、后处理与观察结果。
接着,需要对推理的结果做后处理,计算精度。
python postprocess.py result_path infer_data (参数解释:result_path 表示推理后结果存储的路径,infer_data 表示上一步中推理所用到的图片路径)。
在 “mxbase/lenet”目录下 执行后处理命令:
python postprocess.py ./result_Files/ ../../infer_data/pre_process_image/

结果:如上图所示,可以看到精度的计算结果,为0.9838 。精度结果也会存于acc.log 文件夹中。

MindX SDK推理
-
修改配置文件。
-
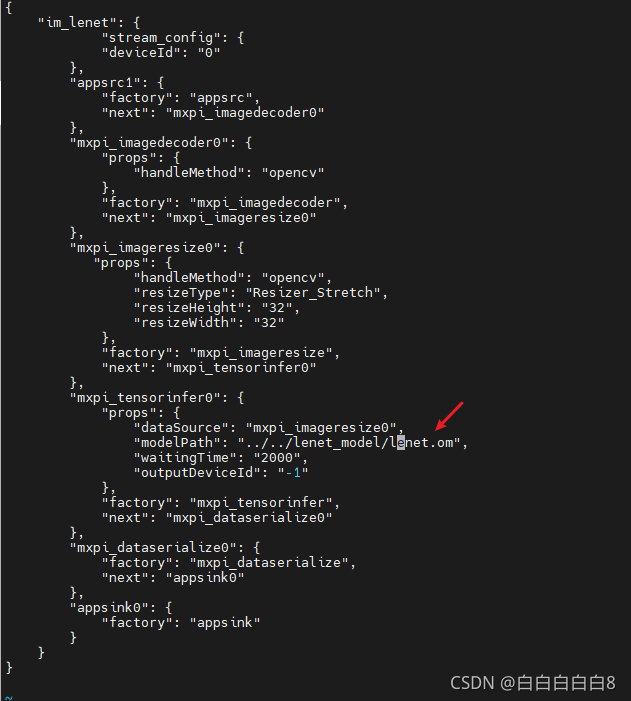
修改pipeline文件。(默认位置 ascend310_infer --> sdk --> pipeline --> lenet.pipeline)
进入pipeline目录:
cd /home/data/hdk_mindx/lenet_code/ascend310_infer/sdk/pipeline/
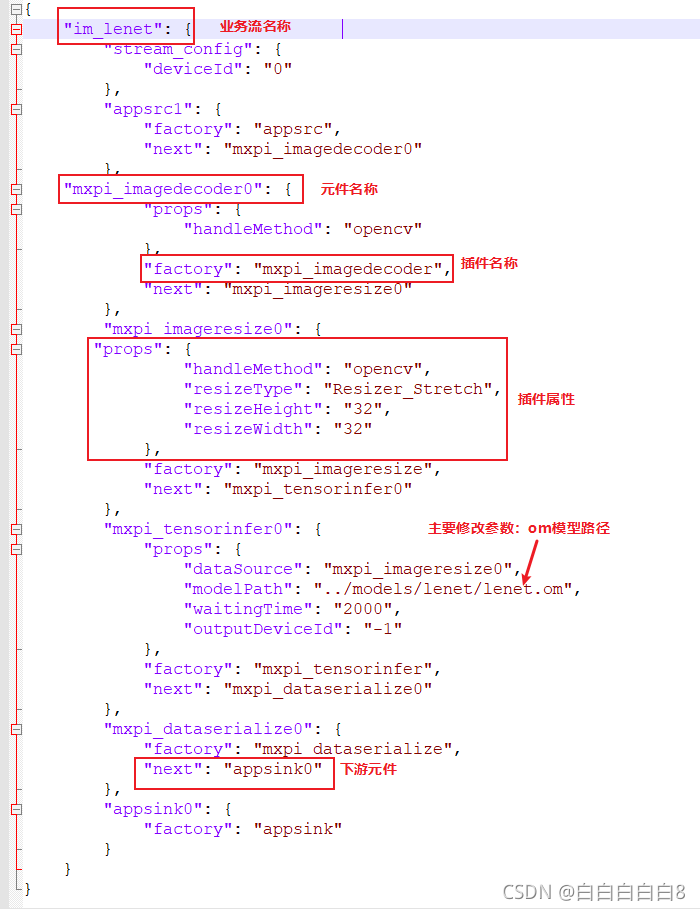
由于之前步骤中,om模型位置为 : ascend310_infer --> lenet_model --> lenet.om ,因此根据实际做修改,其他都不用改。
-
sdk --> python_lenet --> main.py 推理文件需要注意的参数
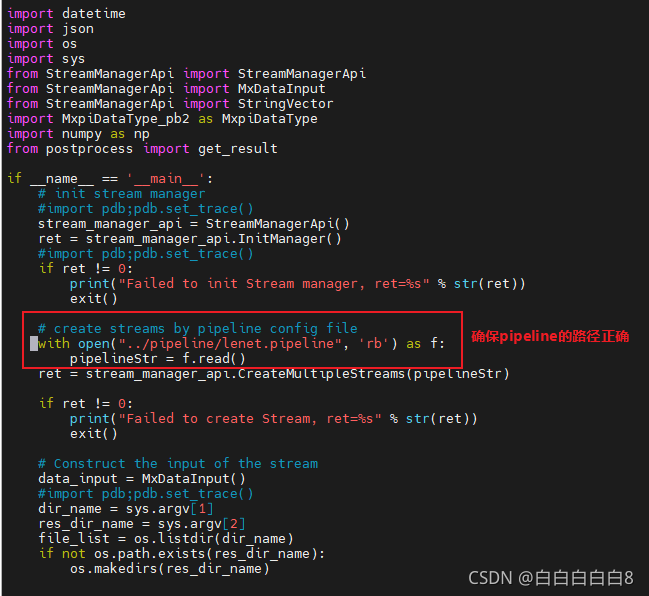
-
sdk --> python_lenet --> run.sh 推理启动脚本需要注意的环境变量配置

-
确保上述${MX_SDK_HOME}等系统环境变量设置正确。
-
-
-
运行推理服务。
-
执行推理。
bash run.sh infer_image_path output_result_path (参数解释:infer_image_path : 待推理图片的路径 output_result_path : 结果保存路径)
如:
bash run.sh ../../infer_data/pre_process_image/ ./result
前面步骤,推理图片路径为: ascend310_infer -->infer_data --> pre_process_image
结果保存于 同级目录下result文件夹中。

出现上图结果表示推理完成!
-
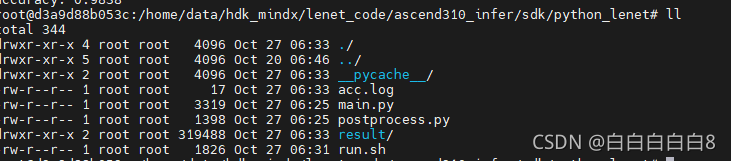
查看推理结果。(main.py 推理脚本 已包含 后处理、计算精度步骤,只需运行run.sh ,结束后 即可看到精度)

可以看到此处的精度和mxbase推理的精度保持一致。
-
















 997
997











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











