







RTK定位技术使用RTCM协议的主要原因包括:
1.提高数据传输效率:RTCM协议通过优化数据格式和传输方式,显著提高了GNSS(全球导航卫星系统)数据的传输效率。这使得RTK系统能够更快地获取和处理卫星数据,从而提升定位速度和精度。
2.增强定位精度:RTCM协议不仅提高了数据传输效率,还在数据格式和传输效率方面进行了优化,进一步增强了RTK系统的定位精度。通过使用RTCM协议,RTK系统能够实现厘米级的定位精度,满足高精度定位的需求。
3. 兼容性和扩展性:RTCM协议具有较好的兼容性和扩展性,能够适应不同的GNSS系统和应用场景。这使得RTK系统能够广泛应用于各种需要高精度定位的领域,如自动驾驶、无人机导航等。
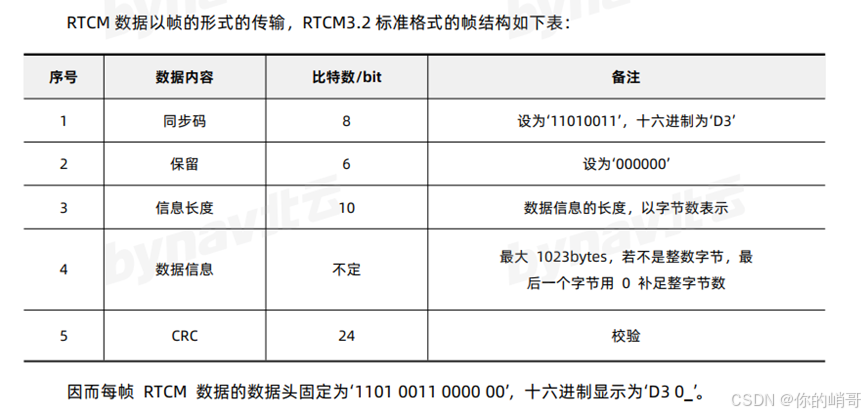
RTCM3.2数据格式解析
基准站位置数据信息(1005 或 1006)
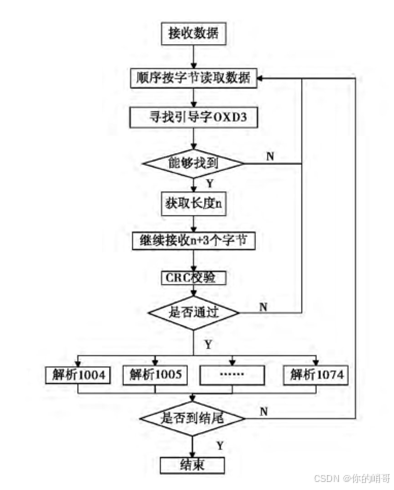
RTCM3.2协议解码流程
RTCM3.2使用方式及注意事项
1.连接与配置
串口连接:将RTCM3.2消息流式传输到串口,同时能够观察接收器状态
NTRIP传输:使用NTRIP协议传输RTCM数据。需要有NTRIP客户端软件来与插件中的NTRIP caster通信。支持多种RTCM3.2消息,包括基站位置消息(1006)、接收机和天线描述(1033)、MSM消息(多信号电文组)等。
2.数据传输与解析
数据格式:RTCM3.2协议定义了通用的帧结构,适用于不同类型的MSM数据。这些帧通常由固定长度的头信息、可变长度的数据子消息以及用于错误检测的CRC校验码组成。
解析过程:接收端收到RTCM3消息后,会根据协议规定的格式进行解析,提取出有用的信息,如卫星位置、信号质量等。
3.版本兼容性
确保使用的导航模块和相关软件支持RTCM3.2协议,并了解其最新版本和特性。
4.数据完整性
在数据传输过程中,使用CRC校验码确保数据的完整性。接收端收到数据后,会重新计算CRC校验码并与接收到的进行比较,以判断数据是否在传输过程中发生错误。
5.配置与调试
在使用RTCM3.2协议进行数据传输前,需要正确配置导航模块和相关软件,并进行充分的调试以确保数据传输的正确性和稳定性。
6.环境因素
在使用RTK技术进行测量时,需要注意环境因素对测量结果的影响,如多路径效应、信号遮挡等。
7.安全与隐私
在处理和使用RTCM3.2协议传输的数据时,需要注意数据的安全性和隐私性,避免数据泄露或被恶意利用。
具体步骤如下:
硬件连接与软件初始化,模块初始化,设置模块端口输出,配置消息输出,设置GPS基站观测,查看运行状态,移动站配置。
导航模块的多频,多模
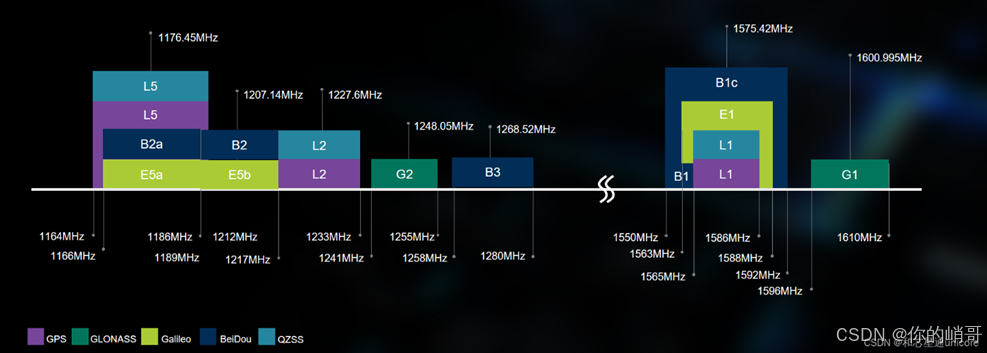
导航采用多个载波频率的主要目的是为了更好地消除电离层延迟,并组成更多的线性组合观察值。GNSS系统使用多个载波频率是为了提高定位的准确性和可靠性。
载波频率的选择依据和优势
选择多个载波频率的原因主要包括:
消除电离层延迟:例如L2载波的频率较低,可以有效减少电离层对信号的影响,从而提高定位的准确性。这是因为电离层对电磁波的传播有延迟作用,这种延迟会随着电磁波频率的增加而增加。在高频段,电离层的影响尤为显著,会导致信号传播延迟和误差增大。而GNSS系统通过使用较低的载波频率,如10.23MHz,可以有效地减少电离层的影响,从而提高信号的稳定性和准确性,选择较低的载波频率主要是基于电离层对高频信号的延迟效应。高频信号在通过电离层时,由于电子密度的不均匀分布,会导致信号传播速度变慢,从而产生延迟。这种延迟会随着频率的增加而增加,因此在GNSS系统中使用较低的频率可以有效减少这种影响。
实际应用中,通过使用双频接收机,可以组合不同频率的观测值来消除电离层延迟。
提高定位精度:通过使用多个载波频率,可以组成更多的线性组合观察值,进一步减少误差,提高定位精度。
抗干扰能力:使用不同的载波频率可以增强系统的抗干扰能力,确保信号的稳定传输
多模联合定位是指同时使用多个卫星导航系统的信号进行定位,以提高定位的精度和可靠性。BDS/GPS/GLONASS/Galileo多系统联合定位和单系统独立定位,能够在复杂环境中显著提高定位精度和可靠性
多频多模联合使用课大大提高定位精度减少电离层影响,提高作用距离。
RTCM3协议在RTK导航模块中的实现过程
基准站配备高精度GNSS接收机,能够精确测量卫星信号的载波相位,并将这些数据以及自身的已知坐标信息一起,通过数据链(如无线电台、网络等)传输给用户站(即流动站)。
这些数据被编码为RTCM格式的消息,包含了卫星信号的载波相位观测量、伪距观测量以及必要的误差修正信息。流动站接收并处理RTCM信息,流动站安装了RTK模块,该模块具有接收RTCM信息的功能。当流动站接收到来自基准站的RTCM信息时,RTK模块会解析这些信息,提取出卫星信号的载波相位观测量和误差修正值。然后,RTK模块会利用这些观测量和修正值,结合流动站自身的GNSS信号观测数据,进行实时差分定位解算。在解算过程中,RTK算法会计算载波相位差分值,消除公共误差源的影响,并解算出流动站的高精度位置坐标。RTK模块内置有接收RTCM信息的功能,通常通过串口、网络等接口接收来自基准站的RTCM数据。在接收过程中,RTK模块会解析RTCM消息中的误差修正值,并根据这些修正值实时校正自身的GNSS观测数据。
比如以网络基站为源,填入正确的地址、端口、用户和密码。 先从基站更新加载点列表,选中正确的加载点。 根据协议要求,必须把 GGA 语句发送给基站,才能得到差分数据。 有 2 种方法获得 GGA 语句: 其一, 选中静态经纬高后, 手动输入经纬高或通过获取按钮得到经纬高;其二,不选中静态经纬高,自动从接收机获得 GGA。
RTCM 终端 Ntrip 配置具体步骤:
进入 Ntrip 配置界面,连接RTCM 终端,选择 Ntrip 地址、 端口, 输入用户名和密码。其中用户名和密码是购买差分服务时生成,在 Ntrip 流配置中,配置 Ntrip 数据流的传输时间间隔,然后选择配置加载点所有配置完成后,提示 Ntrip 服务连接成功,就回有对应的rtcm数据通过串口传输并保存下来
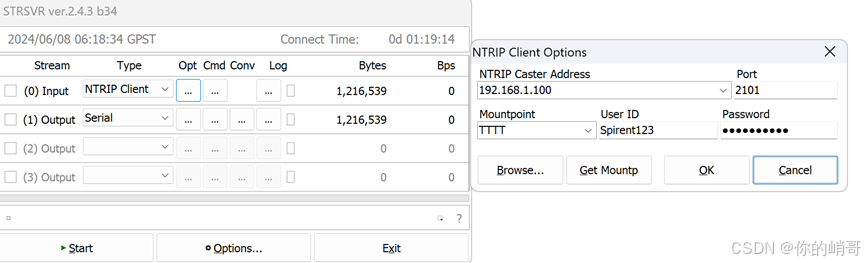
以设置RTKLIB-STRSVR 软件为例:
在Input -options-输入NTRIP的地址,端口以及账户密码
串口输出配置
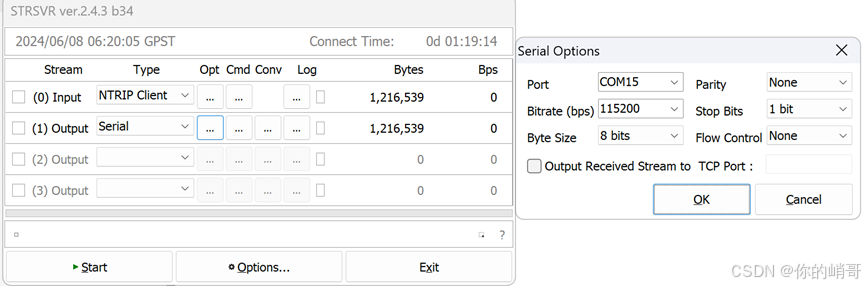
点击运行START后可以左击,start上方正方形图标显示,实时收到的RTCM数据
RTCM3.2协议是一个在RTK模块中通用的协议,RTCM3.2协议是由国际海运事业无线电技术委员会提出的,用于制定在差分全球导航定位系统和实时动态操作时使用的标准。RTCM3协议具有较好的通用性,可以在不同的设备和软件之间进行数据交换,从而提高定位系统的性能和精度。但也存在不使用RTCM3协议的导航模块。一些设备可能使用其他类型的差分改正数据格式,如CMR或CMR+
在GPS导航定位中, CMR代表“采样点时钟标记记录”,是GPS跟踪器中常用的一种格式。CMR文件包含了多个采样点的坐标数据和时间戳等相关信息。而RTCM3则是一种用于水上航行和海洋环境中进行定位、跟踪和报告的通信协议。在使用RTK技术进行导航定位时,通常会遇到两种不同格式的差分电文:CMR和RTCM3。
在无人机系统中,RTCM3.2解析到的数据是通过NTRIP协议发送给用户的。RTCM3.2是一种用于差分全球定位系统(DGPS)的数据传输格式,主要用于实时差分全球定位系统(RTK-GPS)数据传输和格式化。它定义了如何在设备之间传输实时差分校正数据,以提高定位精度
NMEA0183与RTCM协议的差别
传输:
NEMA: GNSS天线和其他设备
RTCM: 不同GNSS接收机间,比如基站和移动站
数据格式:
NEMA: ASCII
RTCM: 二进制
用途:
NEMA: 实时定位结果
RTCM: 实时RTK改正数

















 4538
4538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









