







RTK概念理解
RTK(Real-Time Kinematic)是一种实时动态定位技术,可以提供高精度的位置信息。它的基本原理是通过接收卫星信号并进行差分处理,从而实现高精度的位置测量。
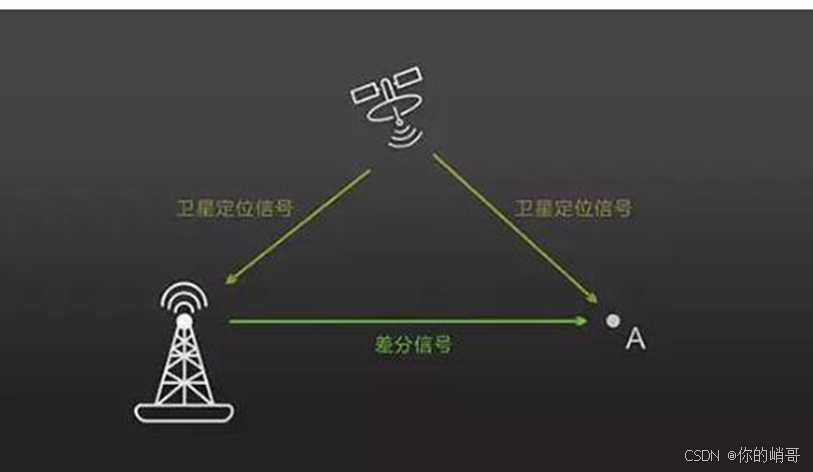
RTK的工作原理可以简单概括为三个步骤:接收卫星信号、差分处理和位置计算。
RTK接收器通过天线接收卫星发射的信号。卫星信号是通过GNSS系统发送的。这些卫星信号携带着时间和位置信息,可以被接收器用来计算位置。接下来,RTK系统进行差分处理。差分处理是通过将接收器接收到的信号与基准站接收到的信号进行比较,得到卫星信号在传输过程中的误差。基准站是一个已知位置的参考站点,通过与接收器进行无线通信,将其接收到的卫星信号数据传输给接收器。
差分处理可以消除大部分卫星信号的误差,提高位置测量的精度。通过比较两个接收器接收到的信号,可以计算出卫星信号在传输过程中的误差,并将其应用于接收器接收到的信号,从而得到更加精确的位置信息。
RTK系统进行位置计算。利用差分处理后的信号数据,接收器可以计算出自身相对于基准站的位置。这个位置是基于卫星信号测量的,因此具有很高的精度。RTK系统可以提供亚米级甚至厘米级的位置精度。
RTK技术是依赖于GPS卫星定位的,使用时要有四颗以上卫星相位观测值的跟踪和必要的几何图形,如果所在地本身接受GPS的信号就很差,那RTK也起不到作用。另外,在有大面积的信号反射物的地方是无法定位的,如高层建筑附近,茂密的森林等;强电磁源也会干扰信号,如高压输电线附近,变电站等,在云层较厚的时候也有影响
接收器和基准站之间通过无线通信进行数据传输,基准站的位置已知,可以提供准确的修正数据。
移动接收器是RTK系统的核心部件,负责接收和处理卫星信号,并通过与基准站的无线通信接收修正数据。控制器用于显示和操作RTK系统,用户可以通过控制器实时查看定位信息和导航数据。
在飞行器的起降过程中,高精度的定位和导航信息对于飞行安全至关重要。RTK技术可以提供实时的位置修正数据,帮助飞行员准确判断飞行器的位置和航向,从而提高飞行的安全性。
RTK的分类及工作原理:
(1)传统RTK工作原理
在传统RTK工作模式下,只有一个基准站(GNSS接收机),基准站和流动站之间的距离有限制。基准站将接收到的测量数据与设置基准站的数据进行计算得出差分数据,然后将差分数据通过电台发送给流动站(用户接收机)。流动站也能通过电台接收基准站发送的差分数据,并进行计算,最终得出我们所需要的坐标数据,并提高定位精度。
(2)网络RTK工作原理
在网络RTK中,有多个基准站,用户不需要建立自己的基准站,用户与基准站的距离可以扩展到上百公里,网络RTK减少了误差源,尤其是与距离相关的误差。
首先,多个基准站同时采集观测数据并将数据传送到数据处理中心,数据处理中心有1台主控电脑能够通过网络控制所有的基准站。所有从基准站传来的数据先经过粗差剔除,然后主控电脑对这些数据进行联网解算。最后,播发改正信息给用户。
网络RTK至少要有3个基准站才能计算出改正信息。改正信息的可靠性和精度会随基准站数目的增加而得到改善。当存在足够多的基准站时,如果某个基准站出现故障,系统仍然可以正常运行并且提供可靠的改正信息。
RTK实现方式
实现方式分为以下步骤:
基准站和移动站:RTK系统由一个基准站和多个移动组成。基准站配备高精度GPS接收机,能够精确测量卫星信号的载波相位,并将这些数据通过数据链传输给移动站。移动站需输入基站的IP、端口、接入点、账号、密码等信息。设置输出端ip地址、端口 配置的cors账户、密码
载波相位观测量:基准站实时获取GPS卫星信号的载波相位观测量,并将其与自身的已知坐标信息一起发送到移动站。
差分改正:移动站接收到基准站的数据后,会计算出两者的载波相位差分值。这个差分值用于修正移动站接收到的载波相位,以消除由于卫星轨道误差、卫星钟差、大气延时以及多路径效应等公共误差源带来的影响。
坐标解算:经过差分改正后的载波相位数据被用于解算移动站的位置坐标。由于采用了高精度的载波相位测量和实时差分改正,最终可以实现厘米级的定位精度。
实时处理:整个过程是实时进行的,即在移动站接收到基准站数据的同时,就能立即进行差分改正并解算出新的坐标位置,从而满足工程作业中对高精度和快速响应的需求。
RTK系统中的双频接收机其工作原理和作用可以从以下几个方面进行详细说明:
1. 工作原理
双频RTK技术使用两个不同频率的卫星信号载波,通常为L1和L2频段。这些频率的载波信号会受到相位差的影响,从而测量出卫星信号传播路径的时间延迟。通过比较不同频率信号的传播时间差异,可以更精确地计算出接收机的位置。
在GNSS(全球导航卫星系统)的测量误差中,电离层引起的误差占了很大一部分。双频载波利用电离层对不同频率电磁波延迟的相关性,来消除大部分电离层误差。这种机制显著提高了定位精度。
RTK算法与组合导航算法高效运行于片上处理器,结合MEMS惯性传感器的数据,使用多维扩展卡尔曼滤波技术及其它特定算法实现了高精度导航测姿功能。这种方法不仅提高了定位精度,还能够在复杂环境下保持连续导航输出。
2. 提高定位精度的作用
使用双频RTK技术,接收机能够实现厘米级甚至亚厘米级的定位精度。这对于需要高精度定位的应用场景(如工程测量、自动驾驶等)至关重要。
双频载波可以互为冗余,当一个频率受到干扰或信号质量下降时,另一个频率仍然可以提供可靠的定位信息。这大大增强了系统的稳定性和可靠性。
在城市峡谷、隧道、地下停车场等复杂环境中,传统的单频GNSS系统可能无法提供准确的定位信息。而双频RTK系统由于其高精度和强大的抗干扰能力,可以在这些环境中保持全路段不间断导航输出。
双频RTK接收机通过同时接收两个不同频率的卫星信号,并利用这些信号之间的相位差和电离层效应的补偿,显著提高了定位精度和系统的稳定性和可靠性。
1台RTK作为基站,实时的将收到的卫星信号等信息发送给移动站,与移动站收到的相同卫星信号等信息进行求差运算,以达到厘米级的定位精度,也就是我们所说的固定解。采用相对定位的原理实现厘米级定位精度,实际上就是假设基站与移动站所收到的误差是一样的,两者之间距离越远,精度越差。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









