







 今天分享的深度研究报告:《(报告出品方:申万宏源研究)报告共计:45页。
今天分享的深度研究报告:《(报告出品方:申万宏源研究)报告共计:45页。
今天分享的机器人行业系列深度研究报告:《机器人控制器,人形机器人行动之脑,全球本体厂商必争之地》。
(报告出品方:申万宏源研究)
报告共计:45页
1.控制器 : 人形机器人之“大脑&小脑
1.1 控制器 : 人形机器人核心基础
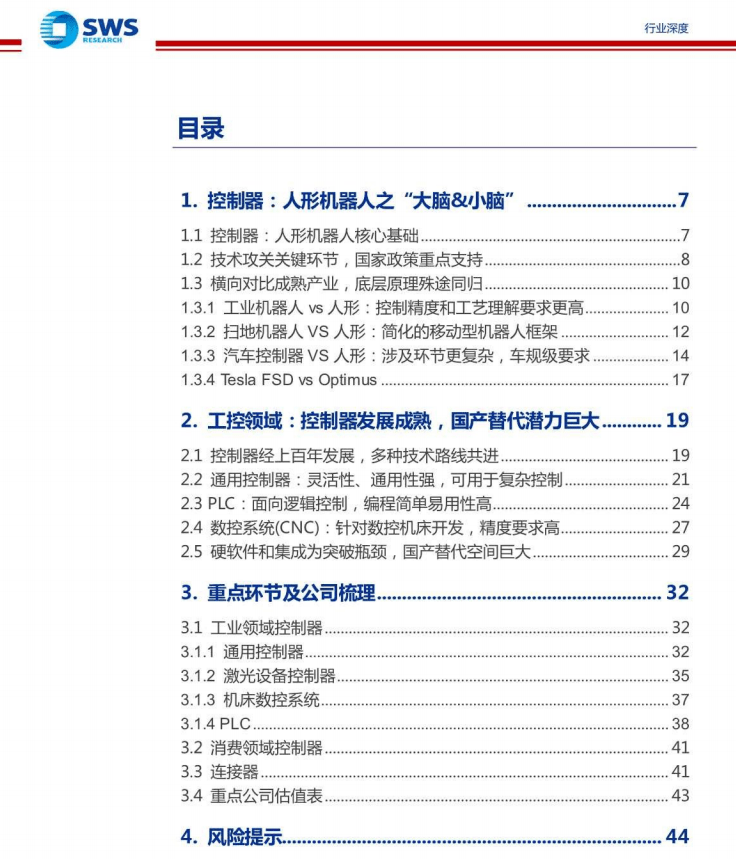
人形机器人控制器框架通常包括感知、语音交互、运动控制等层面。
1)视觉感知层由硬件传感器,算法软件组成,实现识别、3D建模、定位导航等功能;2)运动控制层由触觉传感器、运动控制器等硬件及复杂的运动控制算法组成,对机器人的步态和操作行为进行实时控制;3)交互算法层:包括语音识别、情感识别、自然语言和文本输出等。
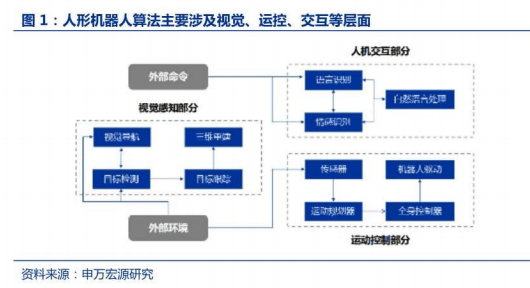
以UCLA的人形机器人平台ARTEMIS为例,其控制架构包括硬件接口、仿真界面、控制器接口、安全接口,由中央处理器(CPU)来共享和存储数据和信息。由于目前人形机器人技术方案尚未定型,技术快速迭代,控制器适合采用模块化结构,从而便于更换组件,简化创建不同控制器组合的过程。①硬件接口:包括执行器、惯导(IMU)、传感器等,反馈关节位置、速度、扭矩等数据信息;②仿真界面:模仿硬件接口的功能从而进行仿真环境的模拟测试;③控制器接口:读取到内外部环境信息后,对运动控制器等发送指令;④安全接口:在检测到任何错误行为时关闭机器。
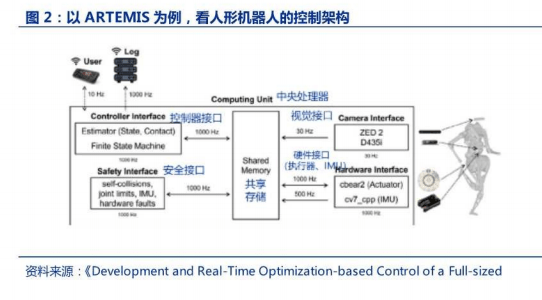
运动控制器是人形机器人控制架构中最重要且复杂的模块之一。对于人类而言,人类可以结合使用不同的感官,如视觉、触觉和听觉等来应对环境中的不确定性,经过长时间的走路训练,运动控制早已内化为“下意识”动作,对于机器人而言,如果机器人在不平坦地面和不确定的外部环境中进行动态运动,运动控制器需要实时调整其计划和轨迹,并协调双足和全身肢体的状态。
1.2 技术攻关关键环节,国家政策重点支持
“大脑”和“小脑”是人形机器人产业化落地的关键所在,也是技术难点所在,不仅是各家人形机器人厂商竞争的关键点,也是目前政策层面重点支持的环节。在今年两大工信部发布的人形机器人重磅政策中,“运动控制”均放在关键位置。
1.3 横向对比成熟产业,底层原理殊途同归
1.3.1 工业机器人 vs 人形:控制精度和工艺理解要求更高
工业机器人控制器作为机器人的“大脑”,具有控制机械臂的工作状态、运动轨迹空间位置、操作顺序等功能。工业机器人对控制器的基本要求包括:@控制工业机器人的位置、速度、加速度等,对连续轨迹运动的机器人还要有轨迹规划和插补运算功能;@人机交互:工作人员使用示教器、操作面板,对机器人进行编程等;@外部感知:部分场景需要工业机器人对视觉、力觉、触觉等有关信息进行测量感知,有时需要与其他设备交换信息和协调工作。
工业机器人控制器通常是PC-Based 控制,由硬件和软件组成:
①硬件:硬件由工控计算机和示教器(示教编程使用)/电脑面板(离线编程使用)组成。其中,工控计算机由 PCB 电路板(将电子元器件与电气连接)、IC芯片(晶体管电阻、电容等微电子元器件形成的集成电路)、晶体管(基于输入电压控制输出电流、电阻电容(阻碍电流,在电路中起分压、分流、限流等作用)组成。工控计算机另外包含操作面板、通信接口、网络接口、传感器接口和驱动器接口等。②软件:软件由控制算法和二次开发(客户定制化开发),部分工业机器人采用示教编程,工作人员通过示教器控制工控计算机;部分工业机器人需要工作人员进行离线编程,生成机器人的运行轨迹。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









