







 本文详细介绍了如何使用STM32CubeMX配置三相PWM,包括RCC、时钟树、定时器、PWM模式和死区设置,以及Keil5中定时器的配置和PWM输出。同时,通过Keil5的逻辑分析仪进行仿真实验,展示了PWM频率、周期和死区的测量方法。
本文详细介绍了如何使用STM32CubeMX配置三相PWM,包括RCC、时钟树、定时器、PWM模式和死区设置,以及Keil5中定时器的配置和PWM输出。同时,通过Keil5的逻辑分析仪进行仿真实验,展示了PWM频率、周期和死区的测量方法。
文章目录
- 前言
- 一、cubemx配置
-
- 1.RCC配置
- 2.时钟树配置PLL输入=HSE/1=8MHZ
- 3.Timer配置
- 在这里插入图片描述 刹车中断以及定时器溢出中断配置 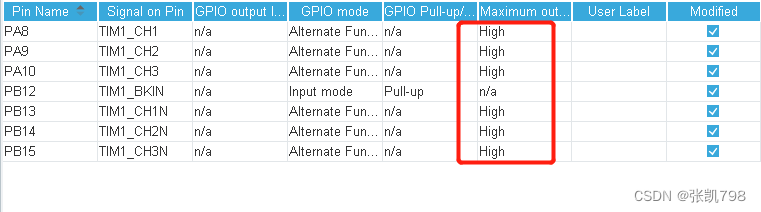 引脚输出频率选为HIGH,刹车引脚选为推挽输出,所有使用到的引脚如图 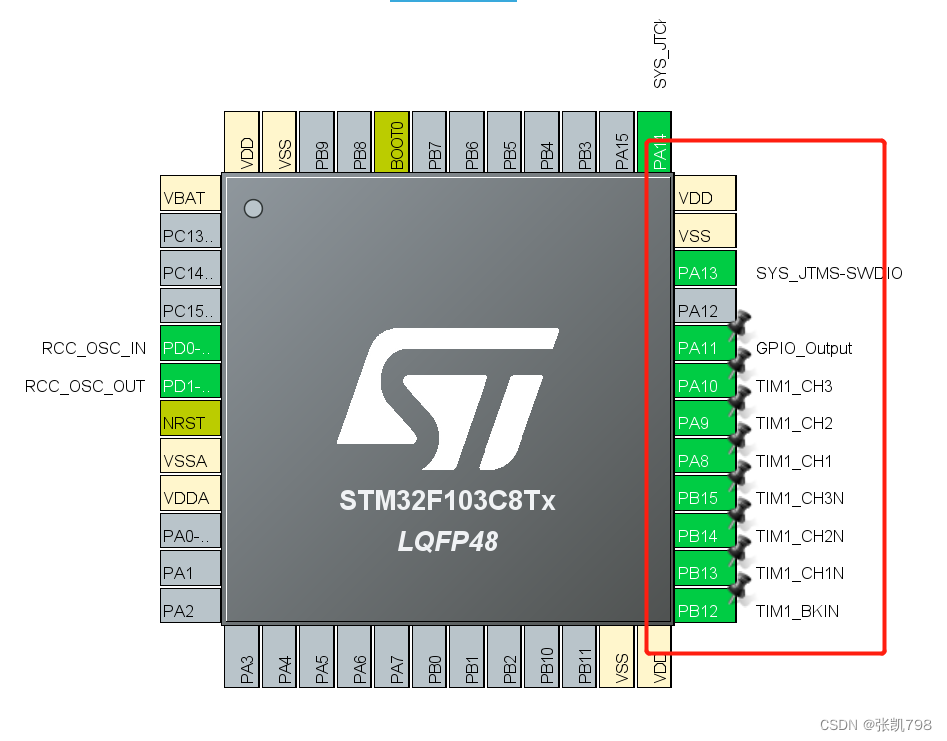
- 在这里插入图片描述 
- 二、keil5定时器配置及输出
- 三、利用keil5自带逻辑分析仪进行仿真
- 总结
前言
第一次写文章,如果有错误请见谅;
本文主要内容:利用cubemx生成带死区补偿刹车的三相互补PWM,并利用keil进行仿真测试.
提示:以下是本篇文章正文内容,下面案例可供参考
一、cubemx配置
1.RCC配置
1.在用cube配置时钟时,有下面三个选项
Disable(禁用)
BYPASS Clock Source(旁路时钟源)
Crystal/Ceramic Resonator(晶体/陶瓷晶振)
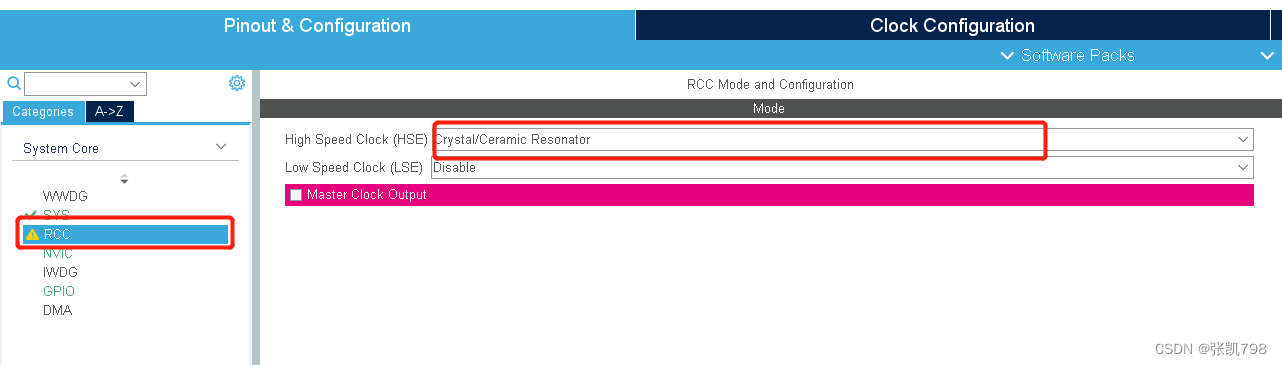
HSE(高速外部时钟源):一般情况下配置为Crystal/Ceramic Resonator(晶体/陶瓷晶振)
LSE(低速外部时钟源):DISABLE
2.时钟树配置PLL输入=HSE/1=8MHZ
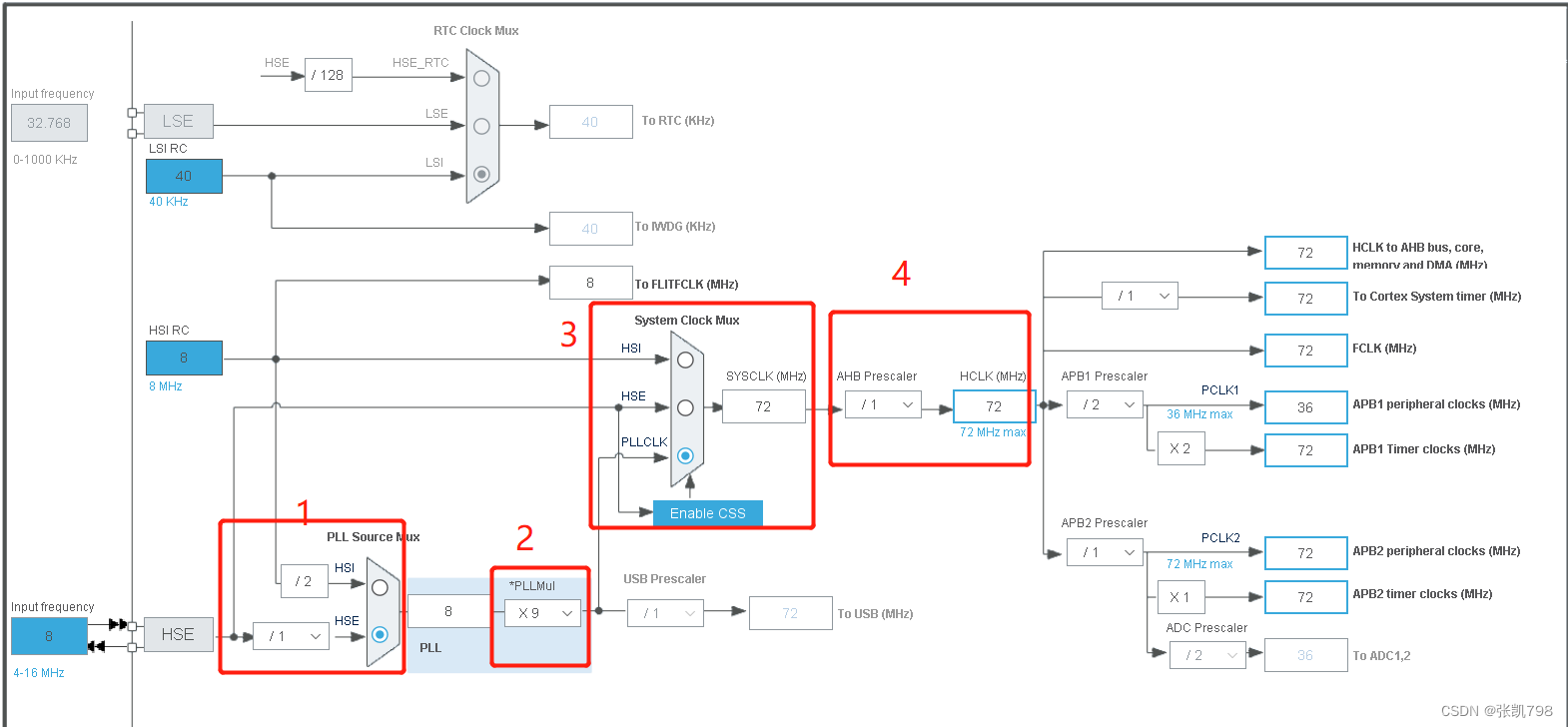
1.PLL输入选择HSE,分频因子1,得到PLL输入=8/1=8MHZ
2.PLL倍频因子选为9,PLL输出=system clock=8*9=72MHZ
3.AHB总线分频因子为1,可得AHB频率=72MHZ
4.APB1为低速总线,挂载外设频率最高为36MHZ,定时器时钟72MHZ.当APB1分频因子为一时,挂载在该总线上的定时器倍频因子不起作用,不为1时,定时器频率为APB1频率的2倍。
5.APB2为高速总线,挂载的外设时钟最高可达到系统最大频率。
3.Timer配置
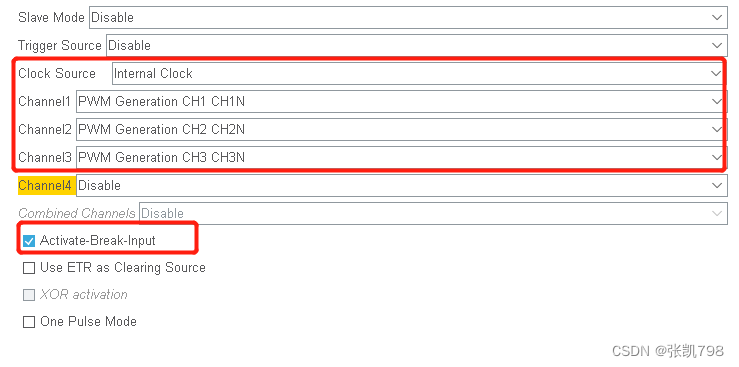
1在选择输出PWM时,Slave Mode ,Trigger Source不会涉及。
2.配置时钟源为内部时钟源,Channel1,2,3配置为PWM互补输出(PWM Generation CHx CHxN),仅有高级定时器Timer1,Timer8具有互补输出。
3.使能刹车 (Active-Break-Input)
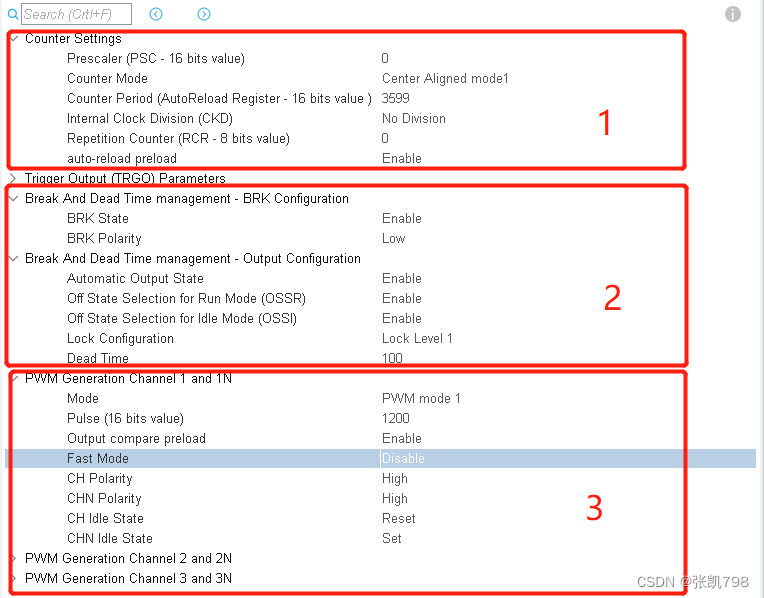
1.基本配置
1.Prescaler:
定时器预分频器设置,时钟源经该预分频器才是定时器时钟,它设定TIMx_PSC寄存器的值。可设置范围为0 至65535,实现1 至65536 分频。
2.Period:
定时器周期,实际就是设定自动重载寄存器的值,在事件生成时更新到影子寄存器。可设置范围为0 至65535。
1.自动重载寄存器ARR
自动重载寄存器ARR 用来存放与计数器CNT 比较的值,如果两个值相等就递减重复计数器。可以通过TIMx_CR1 寄存器的ARPE 位控制自动重载影子寄存器功能,如果ARPE 位置1,自动重载影子寄存器有效,只有在事件更新时才把TIMx_ARR 值赋给影子寄存器。如果ARPE 位为0,则修改TIMx_ARR 值马上有效。
3.ClockDivision:
时钟分频,设置定时器时钟CK_INT 频率与数字滤波器采样时钟频率分频比,基本定时器没有此功能。
4.RepetitionCounter:
重复计数器,属于高级控制寄存器专用寄存器位,利用它可以非常容易控制输出PWM 的个数。
在基本/通用定时器发生上/下溢事件时直接就生成更新事件,但对于高级控制定时器却不是这样,高级控制定时器在硬件结构上多出了重复计数器,在定时器发生上溢或下溢事件是递减重复计数器的值,只有当重复计数器为0 时才会生成更新事件。在发生N+1 个上溢或下溢事件(N 为RCR 的值) 时产生更新事件。
定时器溢出时间的计算:
T=((period+1)*(psc+1))/(TIM_CLK_Mhz / TIM_ClockDivision) us
上式中,period为周期寄存器TIMx->Arr的值,
举个定时1秒的例子:上图中APB2_CLK=72M,进入定时器后先把“预分频”系数psc设为71,这时定时器的频率为1M。然后设置“再分频”系数为1,定时器的频率还是1M。设置周期值period=1000000-1,根据频率可知,1秒钟能计1M个数,那么计100000个数就耗时1秒。
5.计数模式
高级控制定时器的计数器有三种计数模式,分别为递增计数模式、递减计数模式和递增/递减(中心对齐) 计数模式。
(1) 递增计数模式
计数器从0 开始计数,每来一个CK_CNT 脉冲计数器就增加1,直到计数器的值与自动重载寄存器ARR 值相等,然后计数器又从0 开始计数并生成计数器上溢事件,计数器总是如此循环计数。如果禁用重复计数器,在计数器生成上溢事件就马上生成更新事件(UEV);如果使能重复计数器,每生成一次上溢事件重复计数器内容就减1,直到重复计数器内容为0 时才会生成更新事件。
(2) 递减计数模式
计数器从自动重载寄存器ARR 值开始计数,每来一个CK_CNT 脉冲计数器就减1,直到计数器值为0,然后计数器又从自动重载寄存器ARR 值开始递减计数并生成计数器下溢事件,计数器总是如此循环计数。如果禁用重复计数器,在计数器生成下溢事件就马上生成更新事件;如果使能重复计数器,每生成一次下溢事件重复计数器内容就减1,直到重复计数器内容为0 时才会生成更新事件。
(3) 中心对齐模式
计数器从0 开始递增计数,直到计数值等于(ARR-1) 值生成计数器上溢事件,然后从ARR 值开始递减计数直到1 生成计数器下溢事件。然后又从0 开始计数,如此循环。每次发生计数器上溢和下溢事件都会生成更新事件。
2.PWM配置
1.PWM 输出模式
PWM 输出模式就是对外输出脉宽(即占空比)可调的方波信号,信号频率由自动重装寄存器ARR 的值决定,占空比由比较寄存器CCR 的值决定。
PWM 模式分为两种,PWM1 和PWM2,总得来说是差不多,就看你怎么用而已,具体的区别下表PWM1 与PWM2 模式的区别。

PWM1 与PWM2 模式的区别:
以PWM1 模式来讲解,以计数器CNT 计数的方向不同还分为边沿对齐模式和中心对齐模式。PWM 信号主要都是用来控制电机,一般的电机控制用的都是边沿对齐模式,FOC 电机一般用中心对齐模式。这里只分析这两种模式在信号感官上(即信号波形)的区别。
1.PWM 边沿对齐模式
在递增计数模式下,计数器从0 计数到自动重载值(TIMx_ARR 寄存器的内容),然后重新从0开始计数并生成计数器上溢事件。
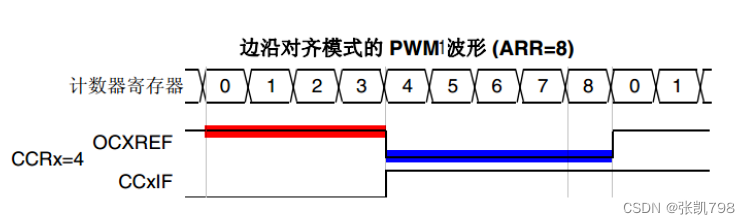
在边沿对齐模式下,计数器CNT 只工作在一种模式,递增或者递减模式。这里我们以CNT 工作在递增模式为例,在中,ARR=8,CCR=4,CNT 从0 开始计数,当CNT<CCR 的值时,OCxREF为有效的高电平,于此同时,比较中断寄存器CCxIF 置位。当CCR=<CNT<=ARR 时,OCxREF为无效的低电平。然后CNT 又从0 开始计数并生成计数器上溢事件,以此循环往复。
2.PWM 中心对齐模式

在中心对齐模式下,计数器CNT 是工作做递增/递减模式下。开始的时候,计数器CNT 从0 开始计数到自动重载值减1(ARR-1),生成计数器上溢事件;然后从自动重载值开始向下计数到1 并生成计数器下溢事件。之后从0 开始重新计数。
2.相关及寄存器
(1) OCMode
比较输出模式选择,总共有八种,常用的为PWM1/PWM2。它设定CCMRx 寄存器OCxM[2:0] 位的值。
(2) Pulse
比较输出脉冲宽度,实际设定比较寄存器CCR 的值,决定脉冲宽度。可设置范围为0 至65535。
(3) OCPolarity
比较输出极性,可选OCx 为高电平有效或低电平有效。它决定着定时器通道
有效电平。它设定CCER 寄存器的CCxP 位的值。
(4) OCNPolarity
比较互补输出极性,可选OCxN 为高电平有效或低电平有效。它设定
TIMx_CCER 寄存器的CCxNP 位的值。
(5) OCFastMode
比较输出模式快速使能。它设定TIMx_CCMR 寄存器的,OCxFE 位的值可以
快速使能或者禁能输出。
(6) OCIdleState
空闲状态时通道输出电平设置,可选输出1 或输出0,即在空闲状态
(BDTR_MOE 位为0) 时,经过死区时间后定时器通道输出高电平或低电平。它设定CR2寄存器的OISx 位的值。
(7) OCNIdleState
空闲状态时互补通道输出电平设置,可选输出1 或输出0,即在空闲状态(BDTR_MOE 位为0) 时,经过死区时间后定时器互补通道输出高电平或低电平,设定值必须与OCIdleState 相反。它设定是CR2 寄存器的OISxN 位的值。
3.死区刹车
断路功能就是电机控制的刹车功能,使能断路功能时,根据相关控制位状态修改输出信号电平。
发送断路时,将产生以下效果:
• TIMx_BDTR 寄存器中主输出模式使能(MOE) 位被清零,输出处于无效、空闲或复位状态;
• 根据相关控制位状态控制输出通道引脚电平;当使能通道互补输出时,会根据情况自动控制输出通道电平;
• TIMx_BDTR 寄存器中主输出模式使能(MOE) 位被清零,输出处于无效、空闲或复位状态;
• 根据相关控制位状态控制输出通道引脚电平;当使能通道互补输出时,会根据情况自动控制输出通道电平;
1.寄存器
(1) OffStateRunMode
运行模式下的关闭状态
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









