







如果您在示教发那科机器人动作指令的时候,出现如图中的错误或者以上报警的情况请参考以下内容,希望可以给您带来帮助。

如图所示:
情况1:机器人P点位数据,为黄色无效状态。
情况2:当我们去示教或者是记录此点位时,会显示(位置尚未记录)。
原因:一般这种情况会容易发生在新机器人上,原因是新机器人在进行系统配置的时候,录入的有附加轴的信息,即机器人有两个组,而我们在正常使用运动指令的时候只有一个组。
解决办法:如图,我们只需要保留机器人的组掩码的第一个组即可。
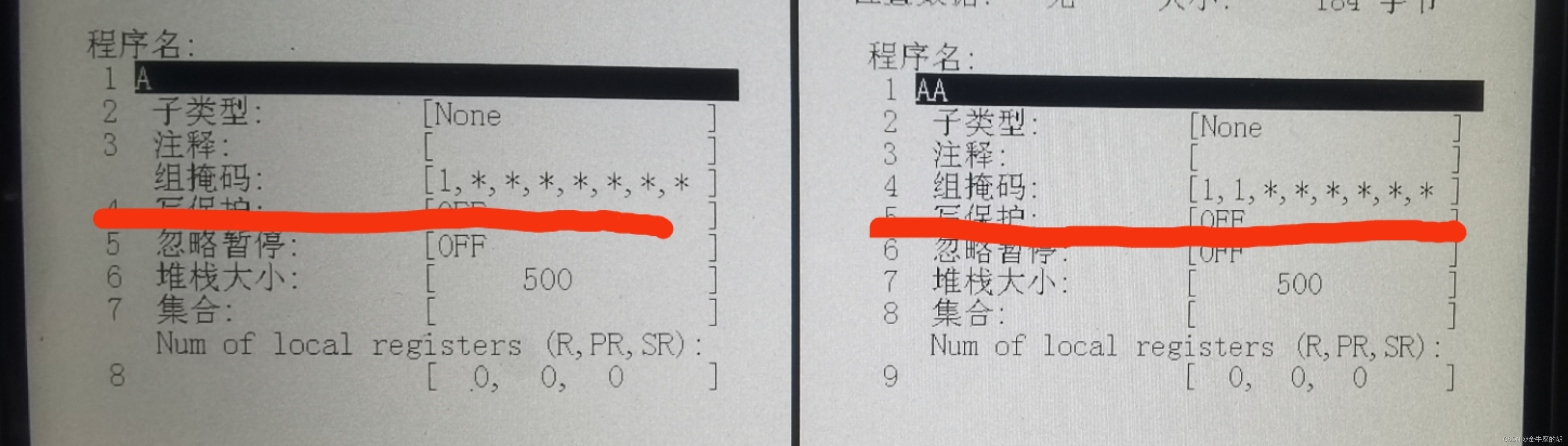
意义:如图左所示当我程序建立的时候系统默认为2个组掩码(图左组掩码为,机器人本身组1),而我机器人本身没有没有外部轴,程序设置里面有组掩码2。造成机器人运动指令错误。
修改方法:
点击程序列表快捷键SELECT
找到运动指令不可以的程序按F2详细
光标移动到4组掩码
把不需要的外部轴组掩码(第二个1,或者第三个1)按F5变成*
最后结束编辑即可。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









