










本次操作演示为:欧姆龙跟发那科机器人、图尔克混合模块、EX-1121模块走EtherNet/IP协议进行通讯。
参与“成员”有:
电脑、网线若干、交换机、电源模块
发那科机器人(需要EDS文件,不分型号)
图尔克混合模块(型号:TBEN-L4-16DXP_R2.7需要EDS文件)
EX-1121模块(需要EX-1121EDS文件)
下面开始演示!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
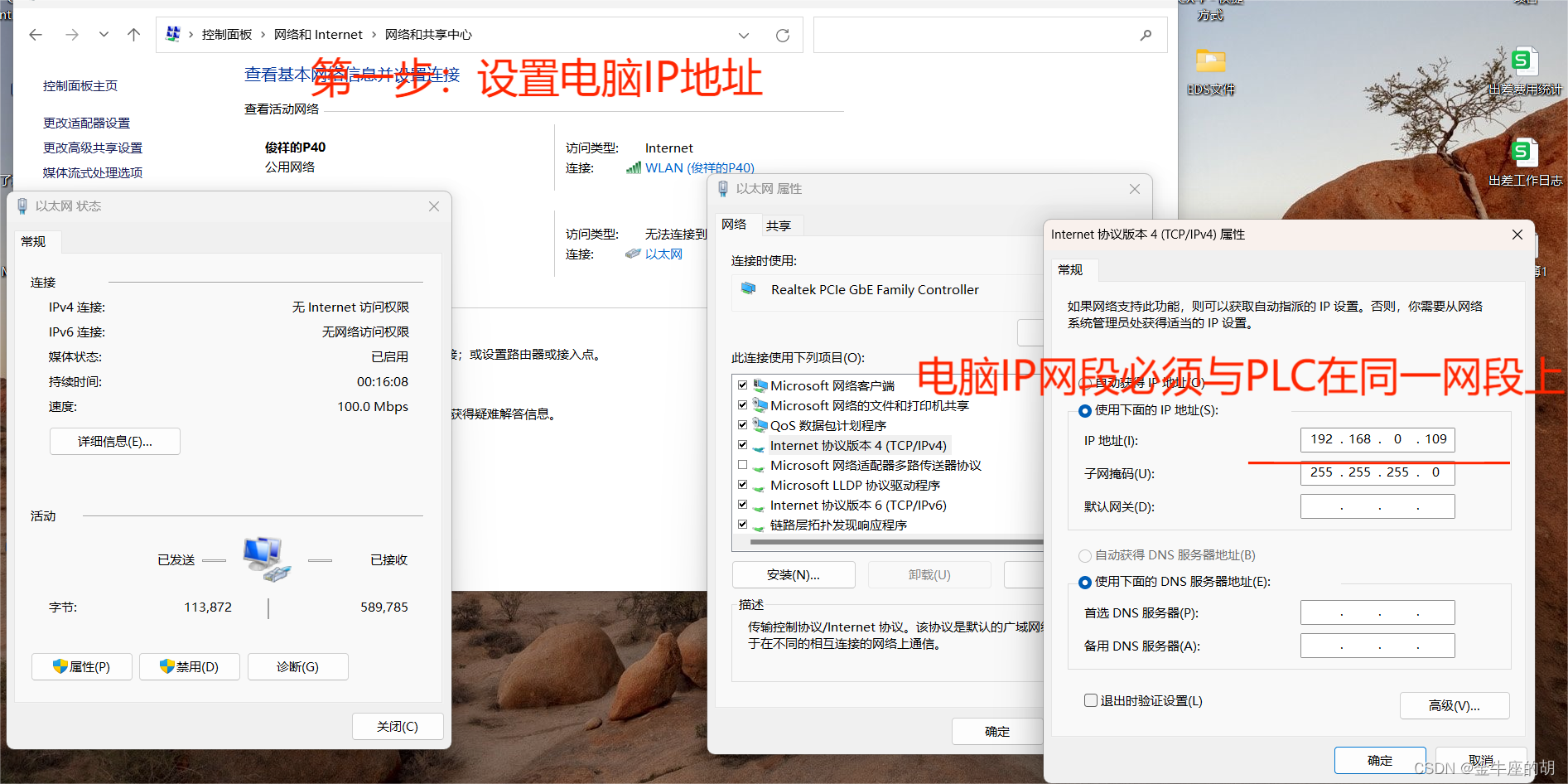
(上图)设置电脑IP
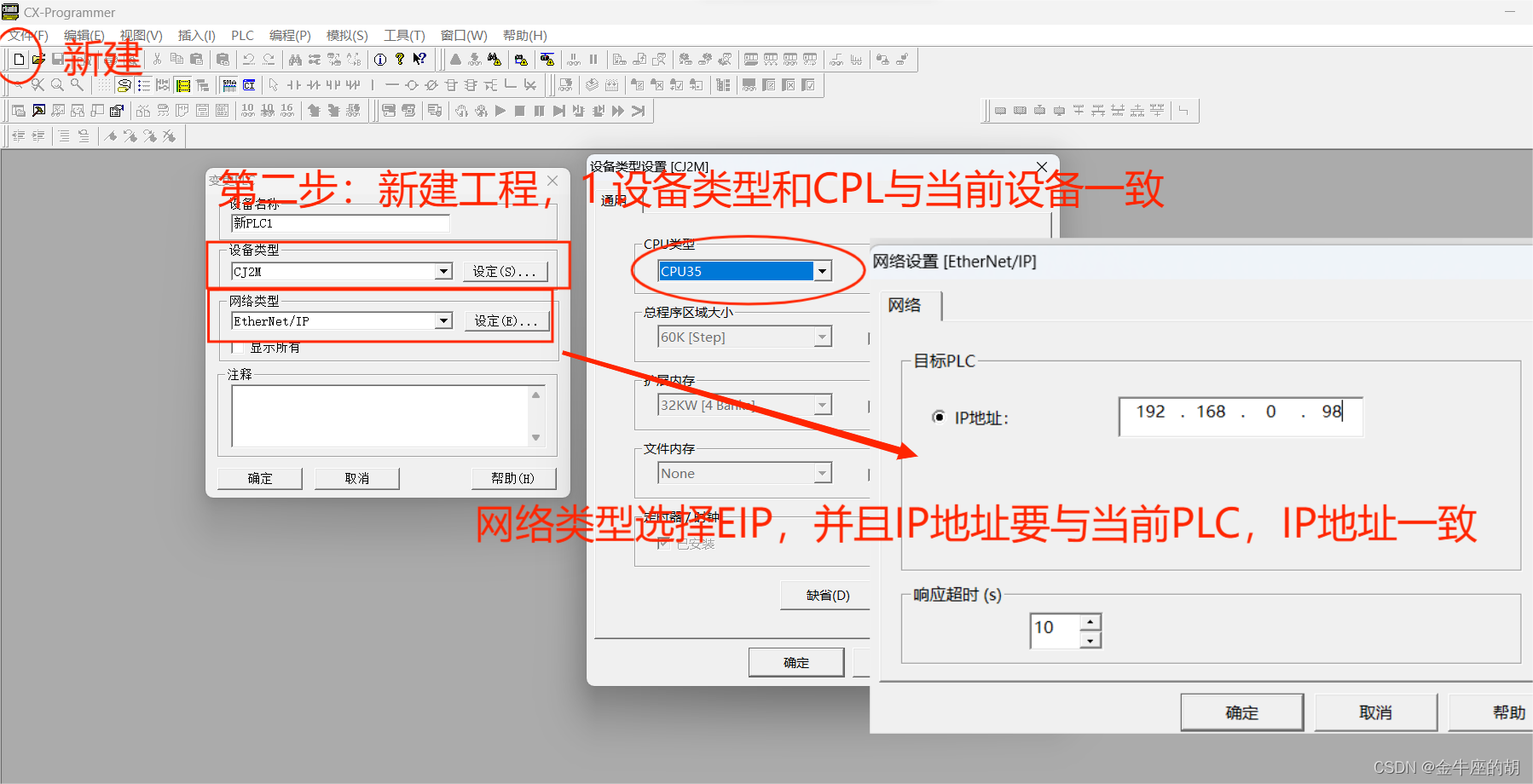
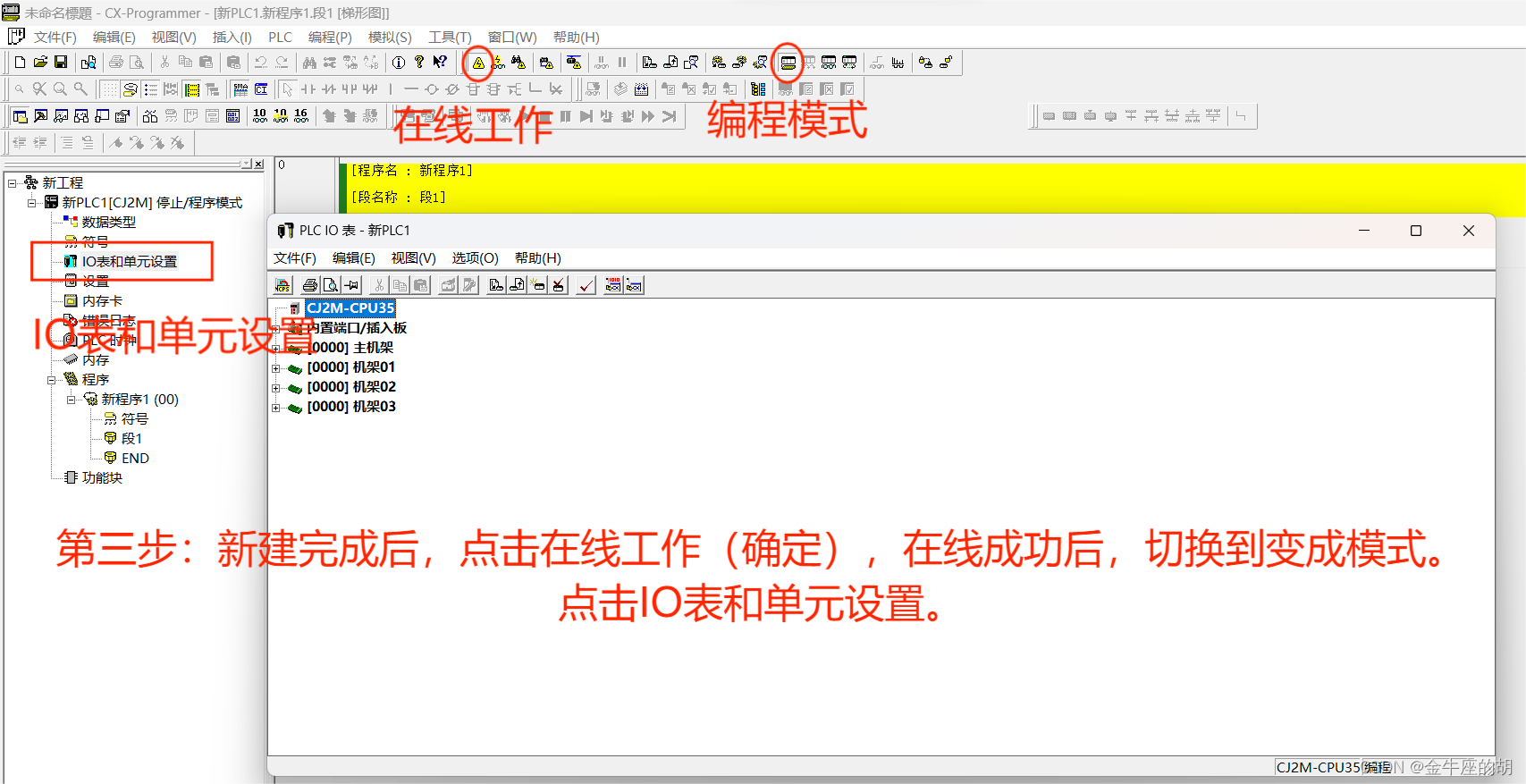
(上图)注:如不知PLC、IP地址的情况下,网络类型选择USB(专用线可以忽视PC和PLC的网段是否统一问题,可以直接进行通讯),通讯完成后,可以按照下图、下下图(此下图、下下图为正常EIP通讯流程)操作,从PLC传送出PLC信息之后,双击单元模块修改IP地址,在下载到PLC内部即可。
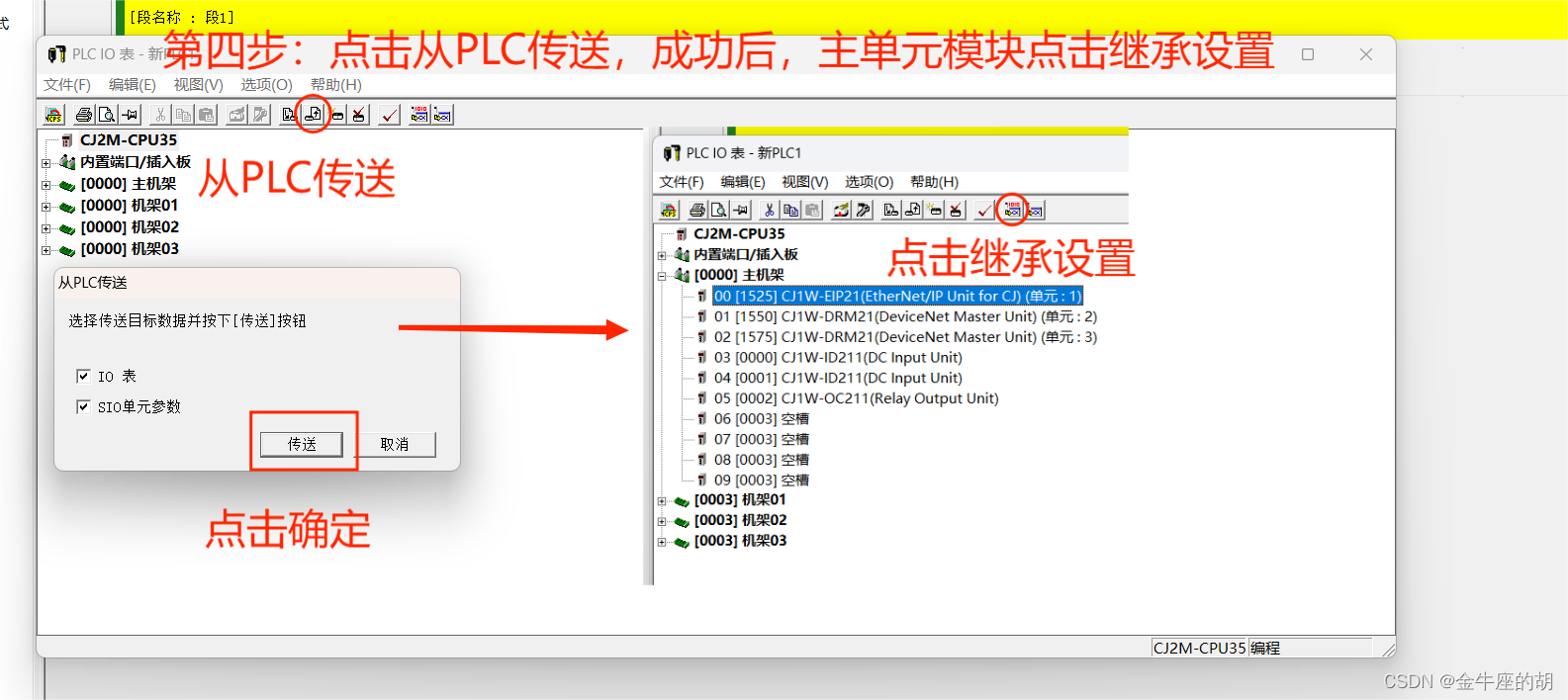
(上图)点击继承设置后,会弹出选择特殊程序窗口,选择Network Configurator,点击确定进入。
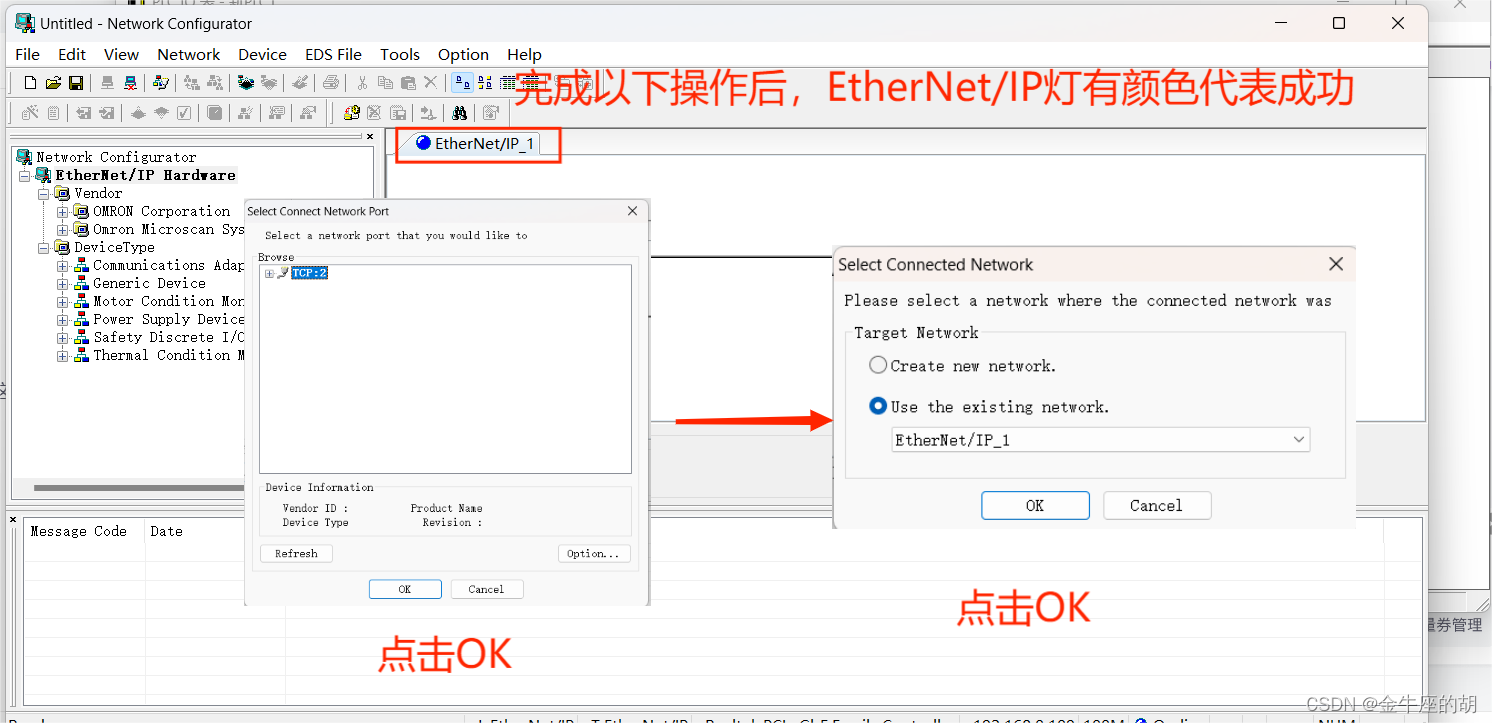
(上图)根据以下操作选项,进入开始设定页面。
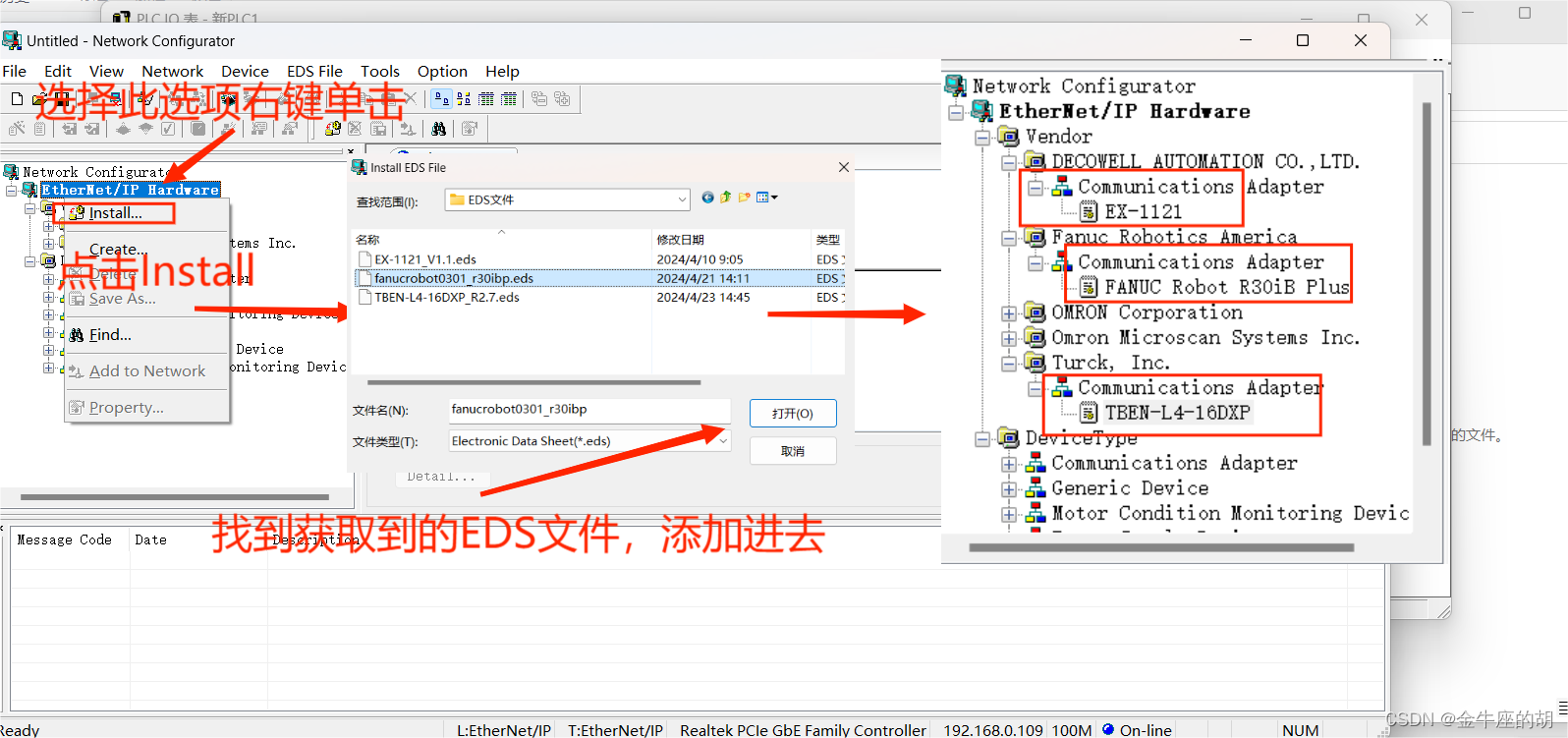
(上图)添加需要组态的设备的EDS文件。
机器人、图尔克、德克威尔均可在官网获取EDS文件。
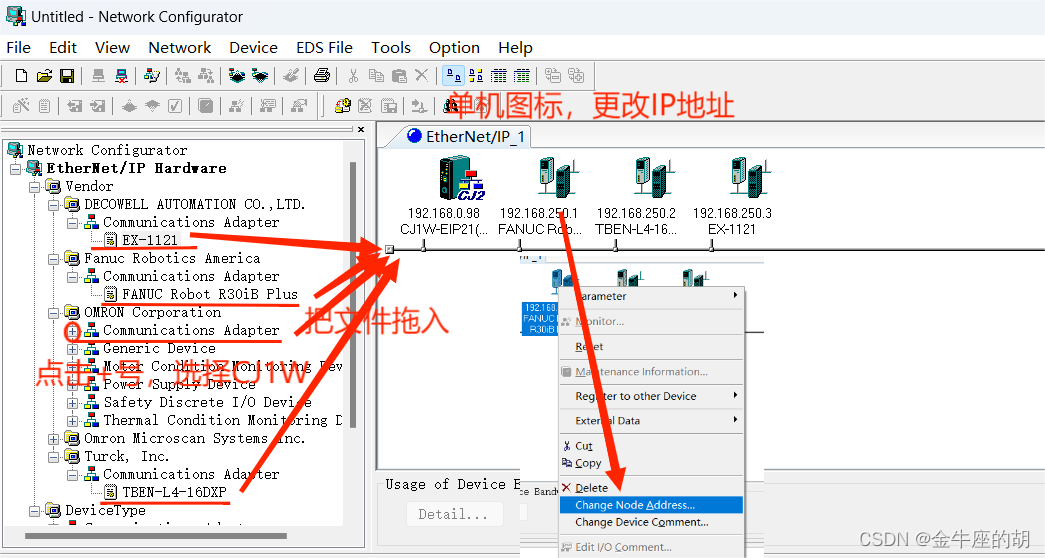
上图:注:图标中的IP地址,需要和硬件地址一样,否则会错误。
发那科机器人的IP在示教器设置中的主机通讯里即可更改。
图尔克和德克威尔则需要再官网上下载相应的更改地址软件。本在其他文章里有详细获取方法或者文件。

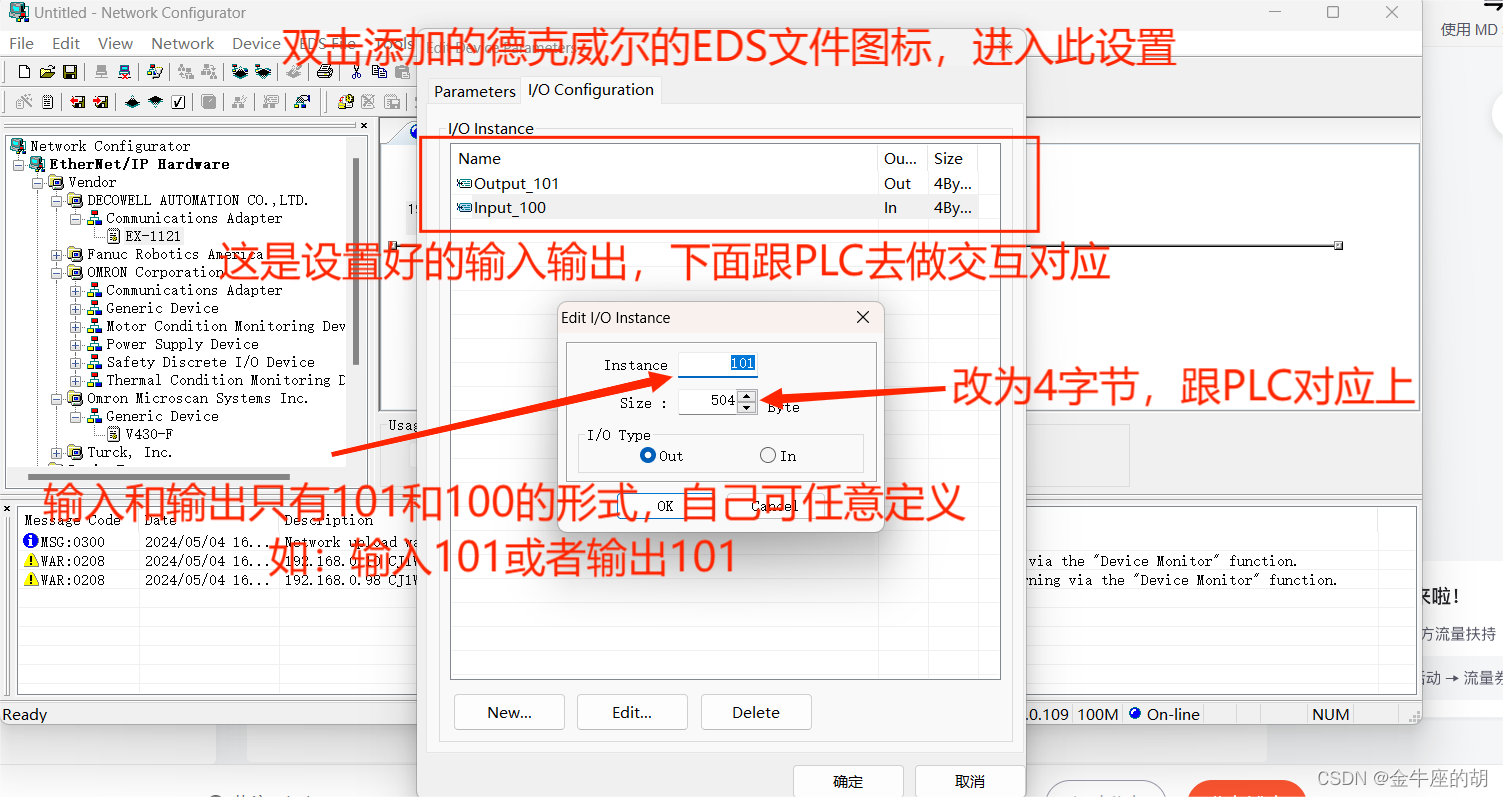
上图:此表大概概括了,主站PLC与发那科、图尔克、德克威尔通讯的地址分配。
发那科机器人上面系统传输方式是字work,一般默认为4.这时候表格中我们分配了16个字节,也就是8个字,这时候我们要在机器人上面改成8个字去对应16个字节。(IO——EIP——无效——配置)
图尔克直接在PLC端进行分配即可
德克威尔需要再上面设置如下图
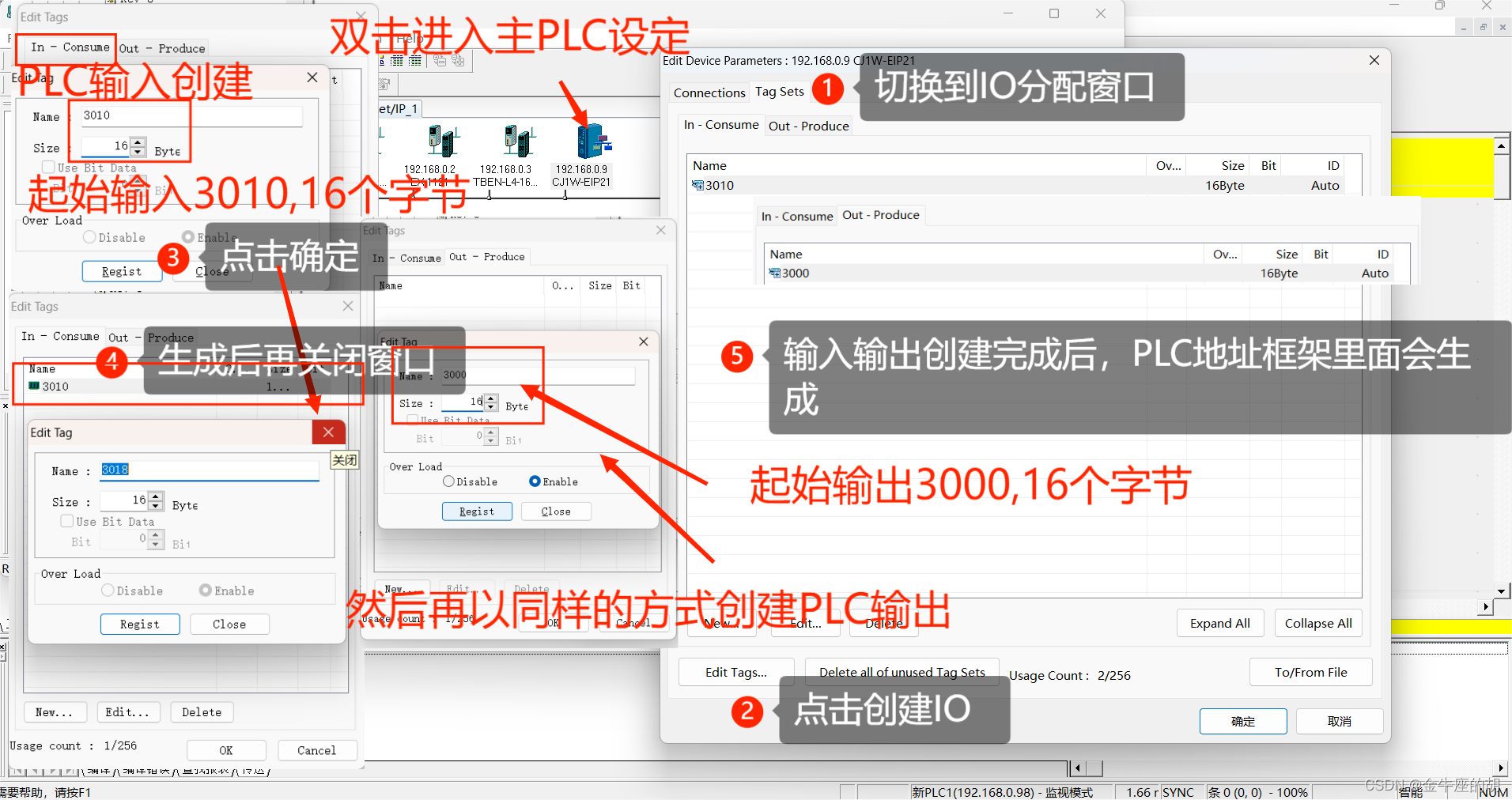
发那科机器人和德克威尔设置好后进行,主PLC的设置。
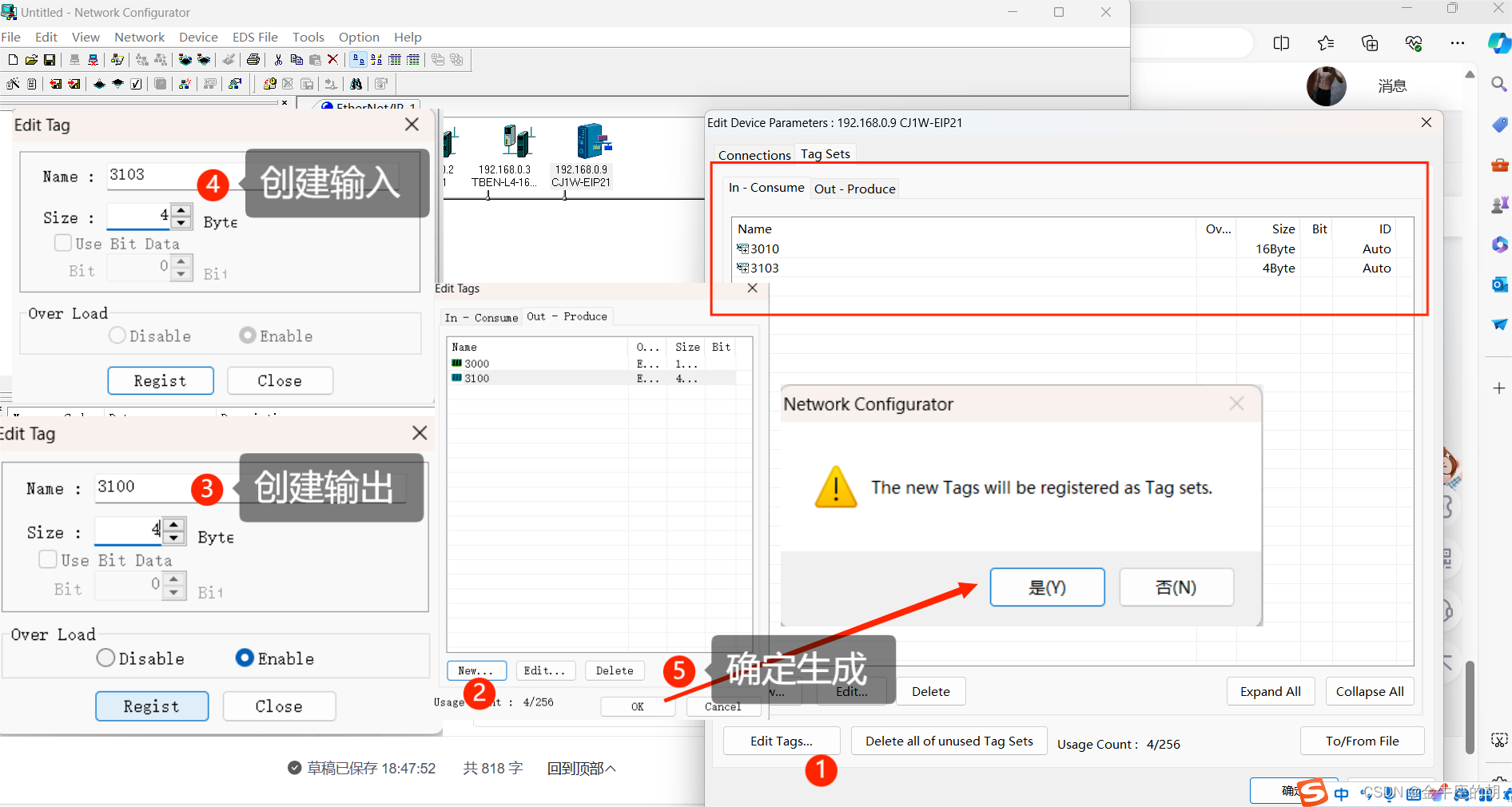
然后再以类似的方法创建德克威尔的地址创建
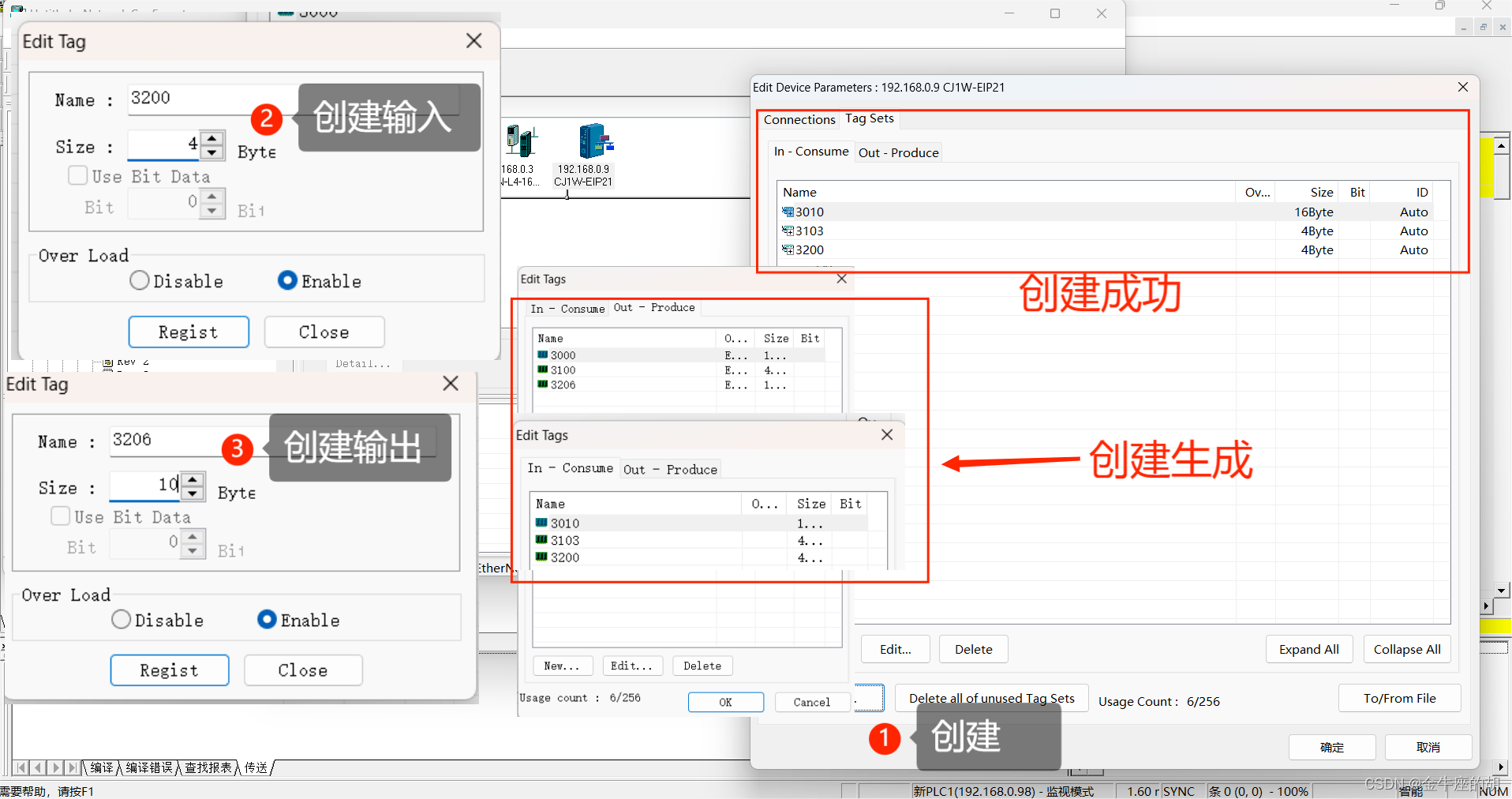
图尔克远程模块PLCCIO创建
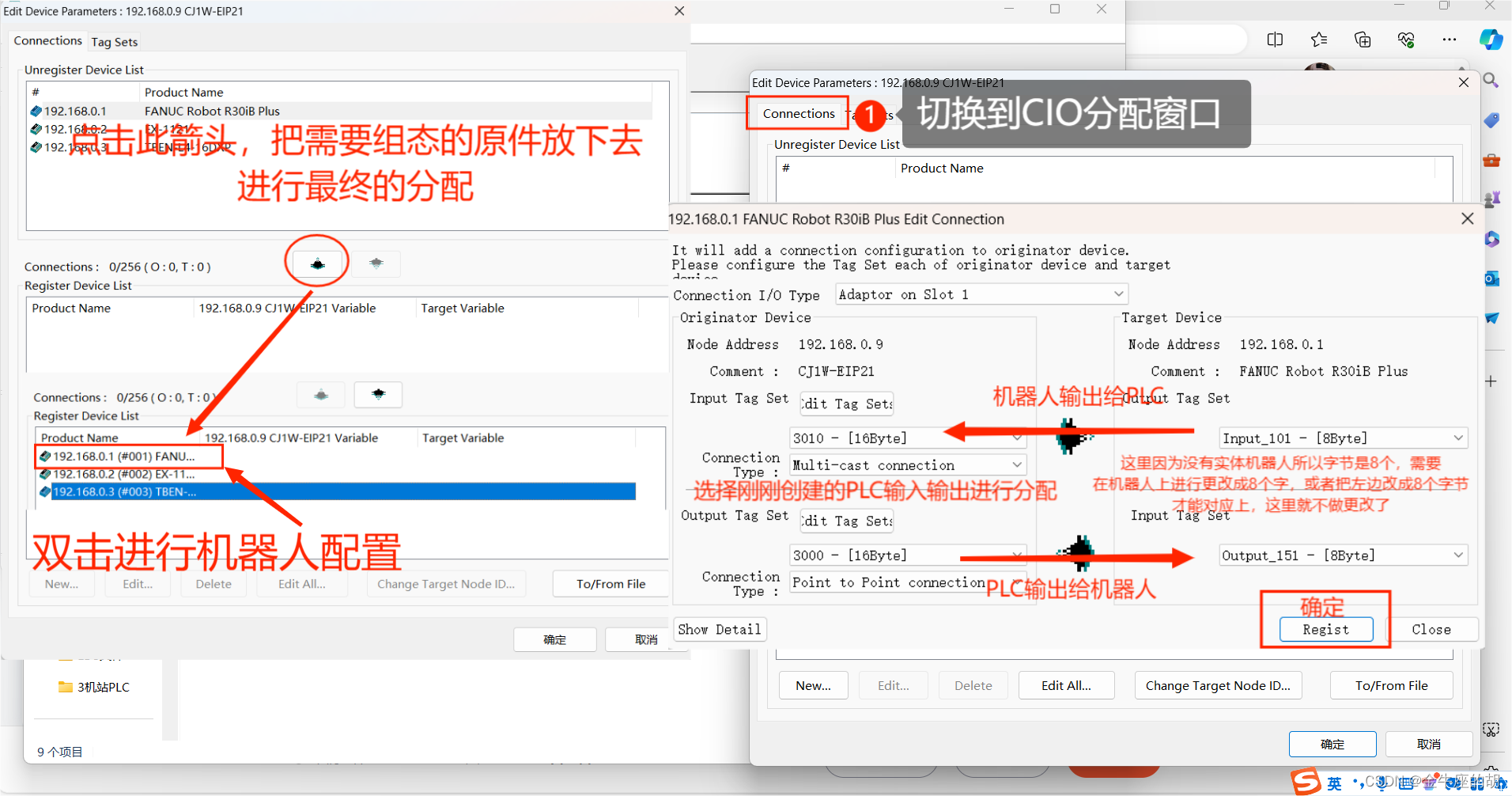
所有CIO创建成功后,首先进行发那科机器人分配
注:欧姆龙PLC和发那科机器人EIP通讯详细在另外文章里。
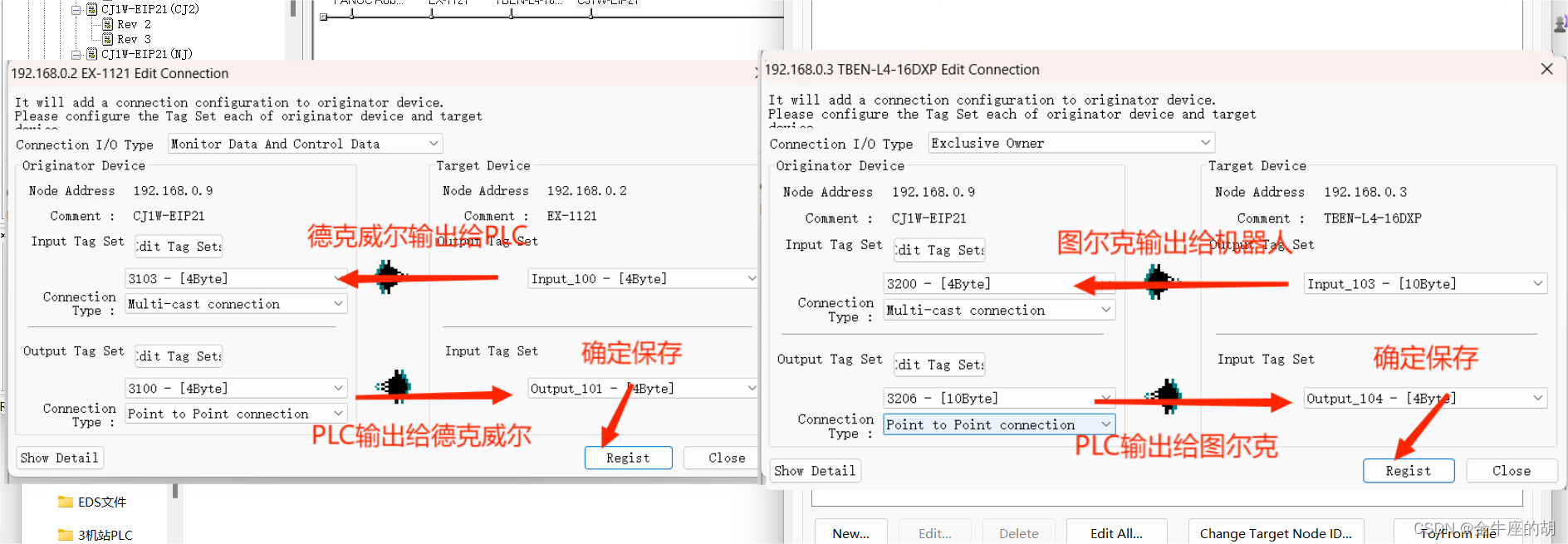
进行德克威尔通讯、图尔克
注:欧姆龙PLC和德克威尔(图尔克)EIP通讯详细在另外文章里。
最终确认
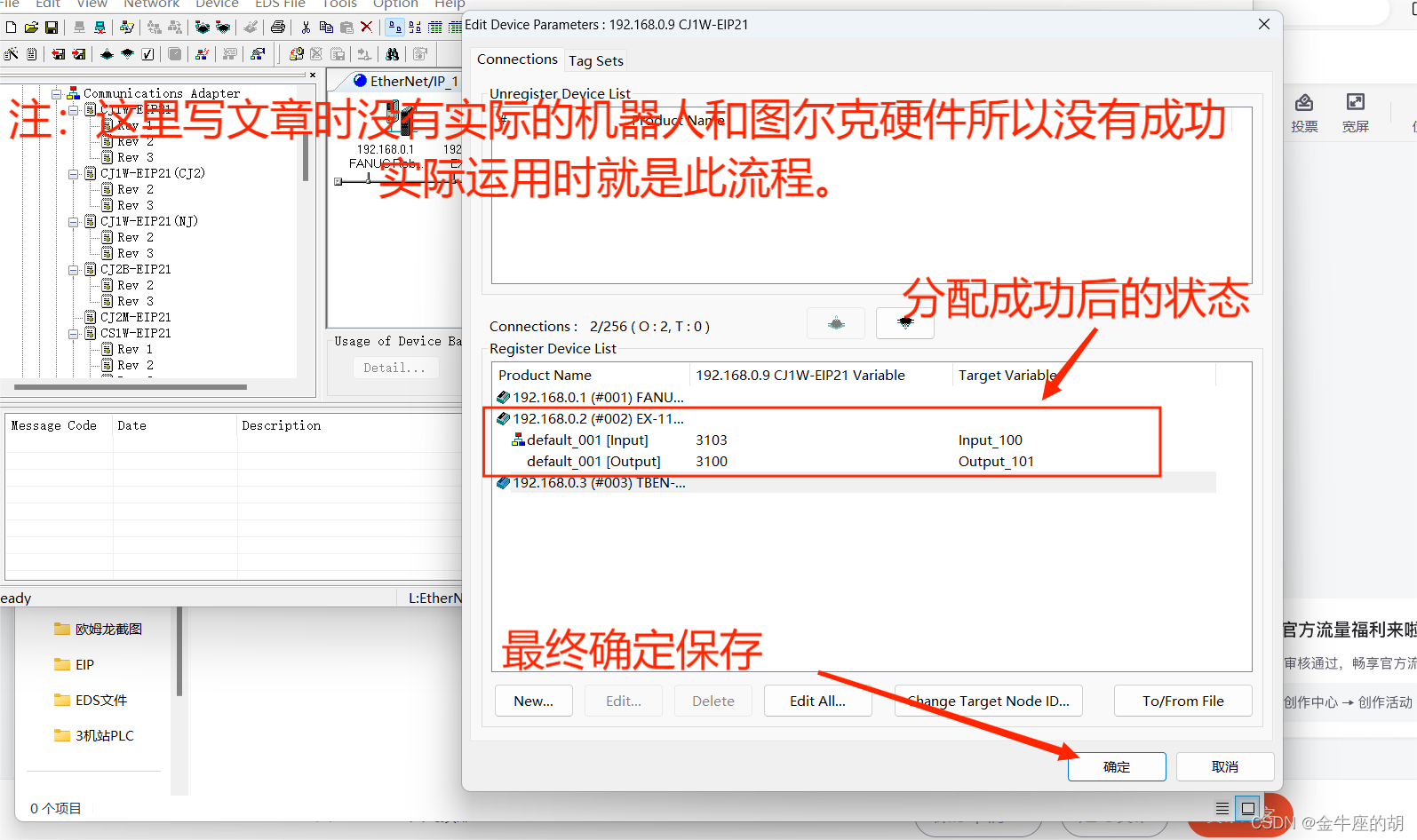
下载到PLC里















 826
826











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









