







所需物件
欧姆龙PLC一台正常上电
发那科机器人一台正常上电
交换机一个
开始演示操作!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
首先设置PLC,单元号可以从0开始,如果PLC上挂了一个以上单元的的话,单元号不能一致,否则会报警出错。IP不能为0,多单元的话不能一致,否则会报价出错。
注:下图是有CPU和EIP21分别有两个IP地址,因为我们是走EIP通讯的,所以只设置EIP21模块的IO单元就可以了。

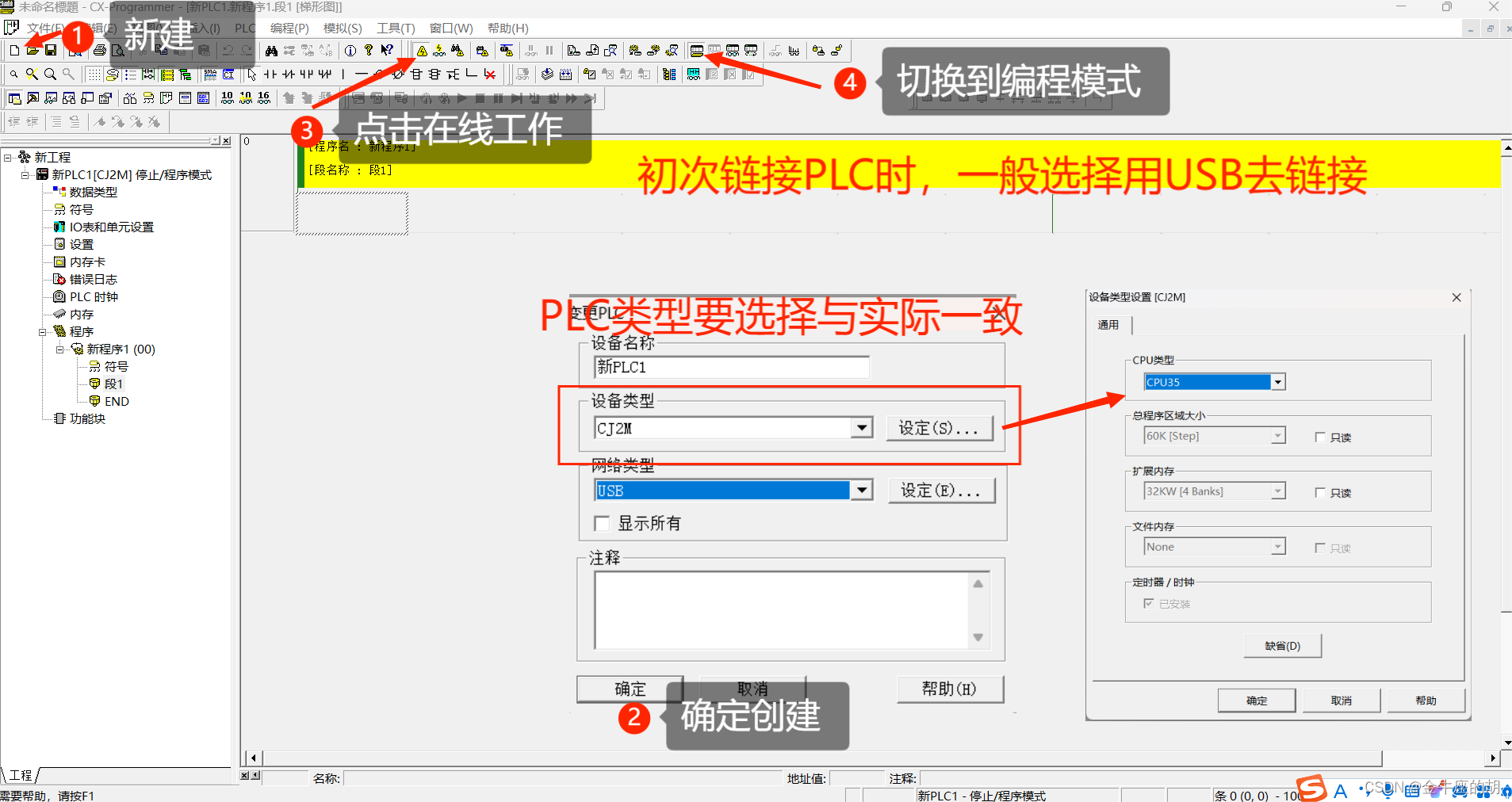
开始在PLC软件(CX-programmer)上设置,首先线通过专用的USB通讯线,去建立通讯。获取PLC的原始地址并且更改。
如下图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1380
1380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









