






 文章讲述了用户在使用sw2urdf插件时遇到的问题,即自定义的坐标系导致rviz中机器人模型散架。解决方法是避免在零件级别选择坐标系,而是使用装配体的坐标,并通过参考几何体生成新的坐标系。最终解决了rviz中模型显示问题。
文章讲述了用户在使用sw2urdf插件时遇到的问题,即自定义的坐标系导致rviz中机器人模型散架。解决方法是避免在零件级别选择坐标系,而是使用装配体的坐标,并通过参考几何体生成新的坐标系。最终解决了rviz中模型显示问题。
问题:sw2urdf插件自动生成的坐标系不符合我的使用需求,于是我在零件中自定义了坐标系,在装配体中,选择零件中的坐标系作为link的坐标系,但是在rviz中,机器人散架了。
解决方法:在自定义link的坐标系、joint的旋转轴时,不要选择零件(设计树次一级)中的坐标系,要选择装配体(设计树第一级)那一级的坐标系。
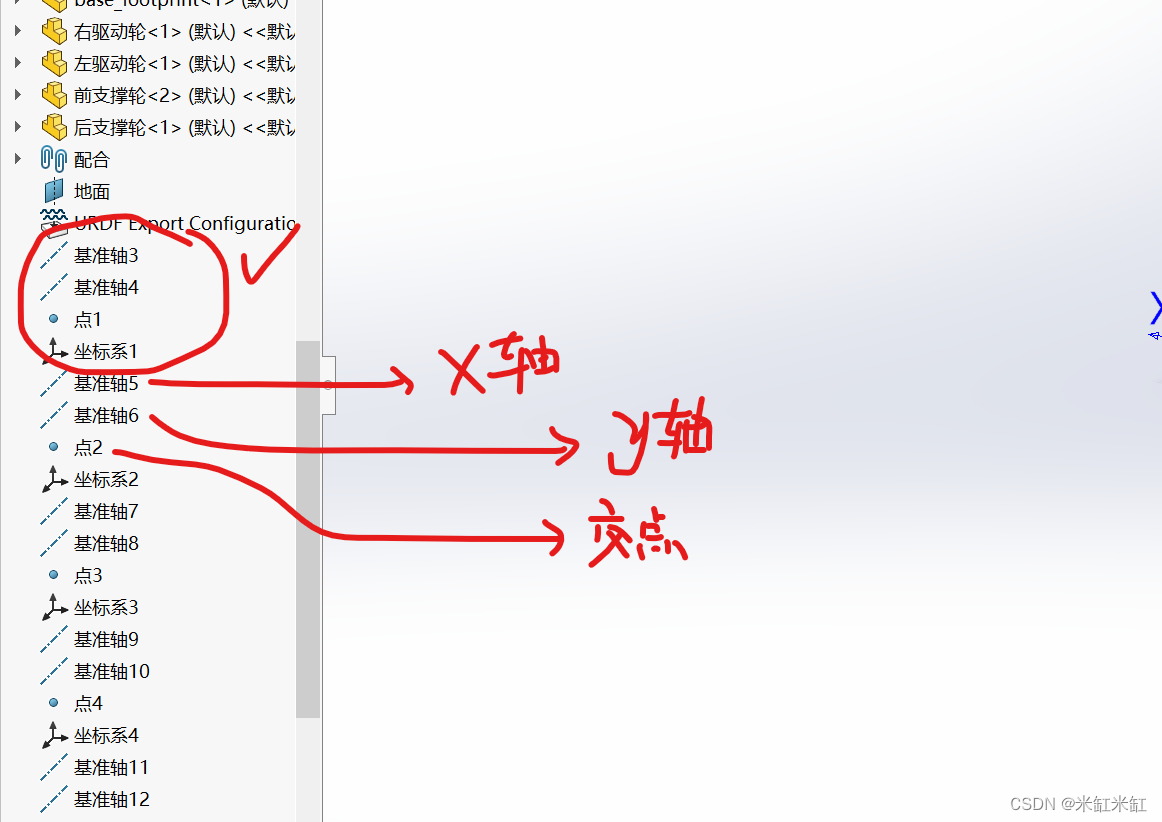
可以把零件中的坐标系的x轴,y轴先用参考几何体参考一份生成到装配体中,再依靠那两个轴生成交点,再利用交点,两条轴生成坐标系。
最后,我在rviz中可以正常显示机器人模型了。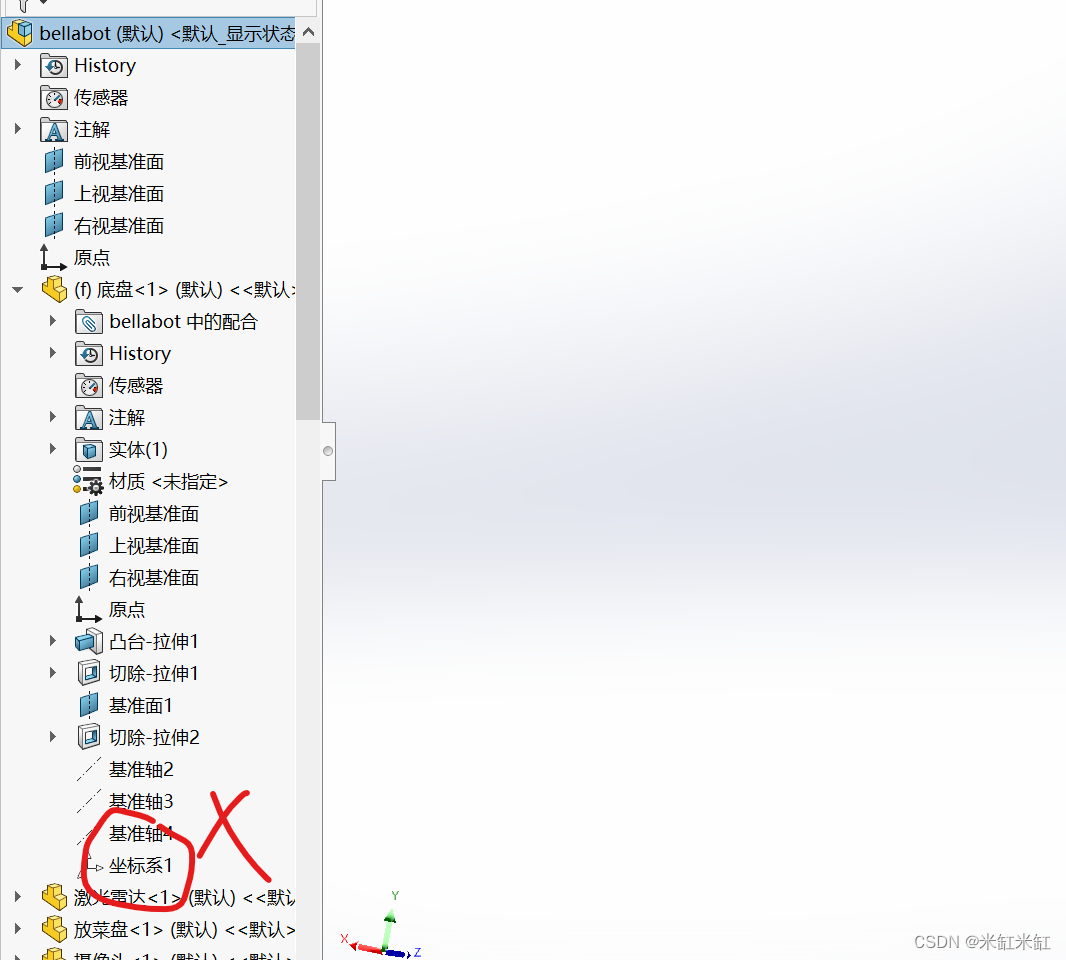
问题:sw2urdf插件自动生成的坐标系不符合我的使用需求,于是我在零件中自定义了坐标系,在装配体中,选择零件中的坐标系作为link的坐标系,但是在rviz中,机器人散架了。
解决方法:在自定义link的坐标系、joint的旋转轴时,不要选择零件(设计树次一级)中的坐标系,要选择装配体(设计树第一级)那一级的坐标系。
可以把零件中的坐标系的x轴,y轴先用参考几何体参考一份生成到装配体中,再依靠那两个轴生成交点,再利用交点,两条轴生成坐标系。
最后,我在rviz中可以正常显示机器人模型了。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























