









💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
文献来源:
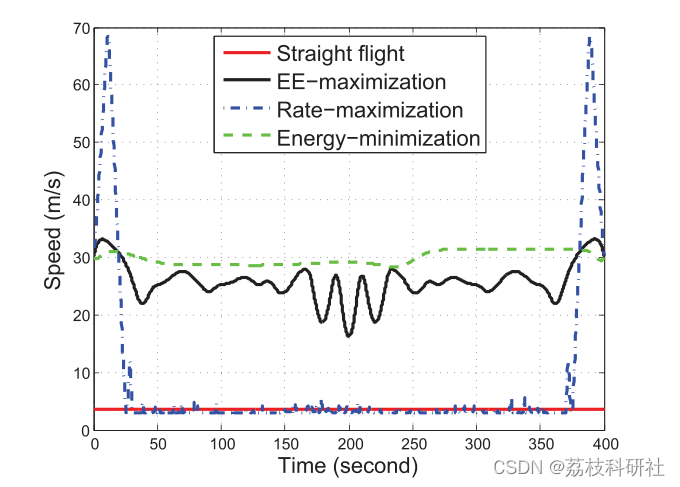
摘要:无人机无线通信(UA Vs)是未来通信系统的一个很有前途的技术。在本文中,假设UAV以固定高度水平飞行,通过优化无人机飞行轨迹来研究无人机与地面终端的节能通信,这是一种综合考虑通信吞吐量和无人机能耗的新设计范式。为此,我们首先推导了固定翼无人机推进能量消耗随飞行速度、方向和加速度变化的理论模型。
在此基础上,在忽略辐射和信号处理能量消耗的前提下,将无人机通信能量效率定义为有限时间范围内无人机推进能量消耗归一化后的总通信信息比特数。在无约束轨迹优化的情况下,我们证明了速率最大化和能量最小化设计都会导致能源效率消失,因此在一般情况下是能源效率低下的。接下来,我们引入了一个简单的圆形无人机轨迹,在此轨迹下,无人机的飞行半径和速度共同优化,以最大限度地提高能效。此外,提出了一种有效的设计,最大限度地提高无人机的能源效率与一般约束的轨迹,包括其初始/最终位置和速度,以及最小/最大速度和加速度。数值计算结果表明,与其他基准方案相比,所提方案可显著提高无人机通信的能效。
指标术语- UA V通信,能源效率,轨迹优化,顺序凸优化。
Abstract— Wireless communication with unmanned aerial vehicles (UA Vs) is a promising technology for future commu-nication systems. In this paper, assuming that the UA V flies
horizontally with a fixed altitude, we study energy-efficient UAV communication with a ground terminal via optimizing the UAV’s trajectory, a new design paradigm that jointly considers both the communication throughput and the UAV’s energy consumption. To this end, we first derive a theoretical model on the propulsion energy consumption of fixed-wing UAVs as a function of the UAV’s flying speed, direction, and acceleration. Based on the derived model and by ignoring the radiation and signal processing energy consumption, the energy efficiency of UAV communication is defined as the total information bits com-
municated normalized by the UAV propulsion energy consumed for a finite time horizon. For the case of unconstrained trajectory optimization, we show that both the rate-maximization and energy-minimization designs lead to vanishing energy efficiency and thus are energy-inefficient in general. Next, we introduce a simple circular UAV trajectory, under which the UAV’s flight radius and speed are jointly optimized to maximize the energy efficiency. Furthermore, an efficient design is proposed for maximizing the UAV’s energy efficiency with general constraints on the trajectory, including its initial/final locations and velocities,
as well as minimum/maximum speed and acceleration. Numerical results show that the proposed designs achieve significantly higher energy efficiency for UAV communication as compared with other benchmark schemes.
Index Terms— UA V communication, energy efficiency, trajec-tory optimization, sequential convex optimization.
📚2 运行结果
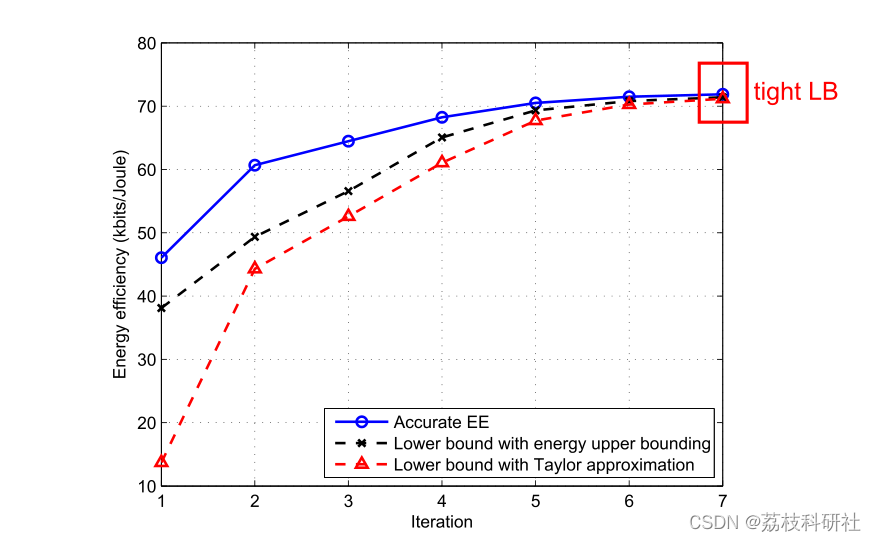
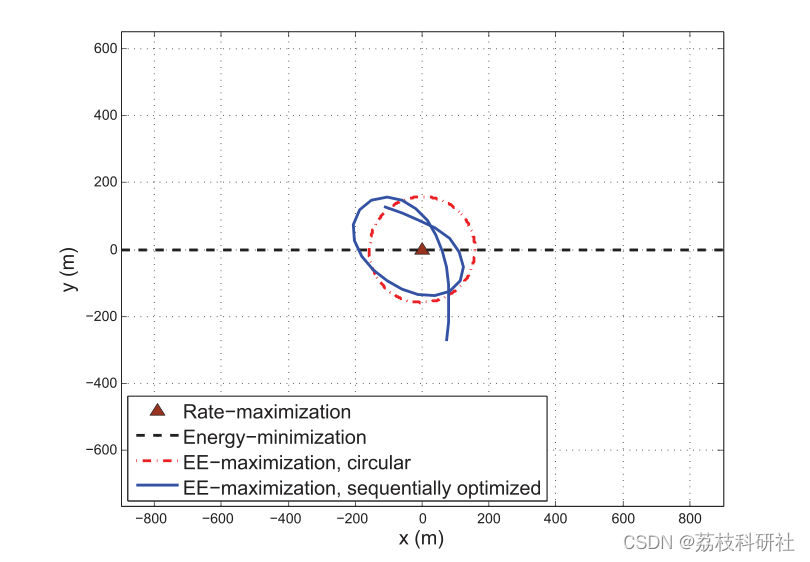
2.1 文献结果:
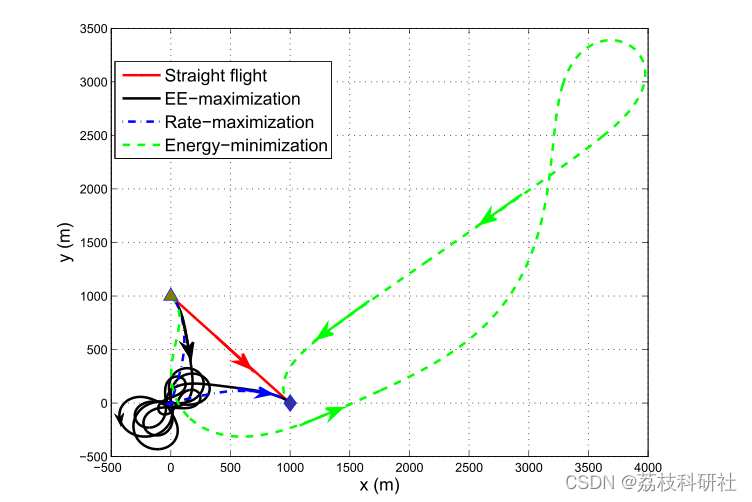
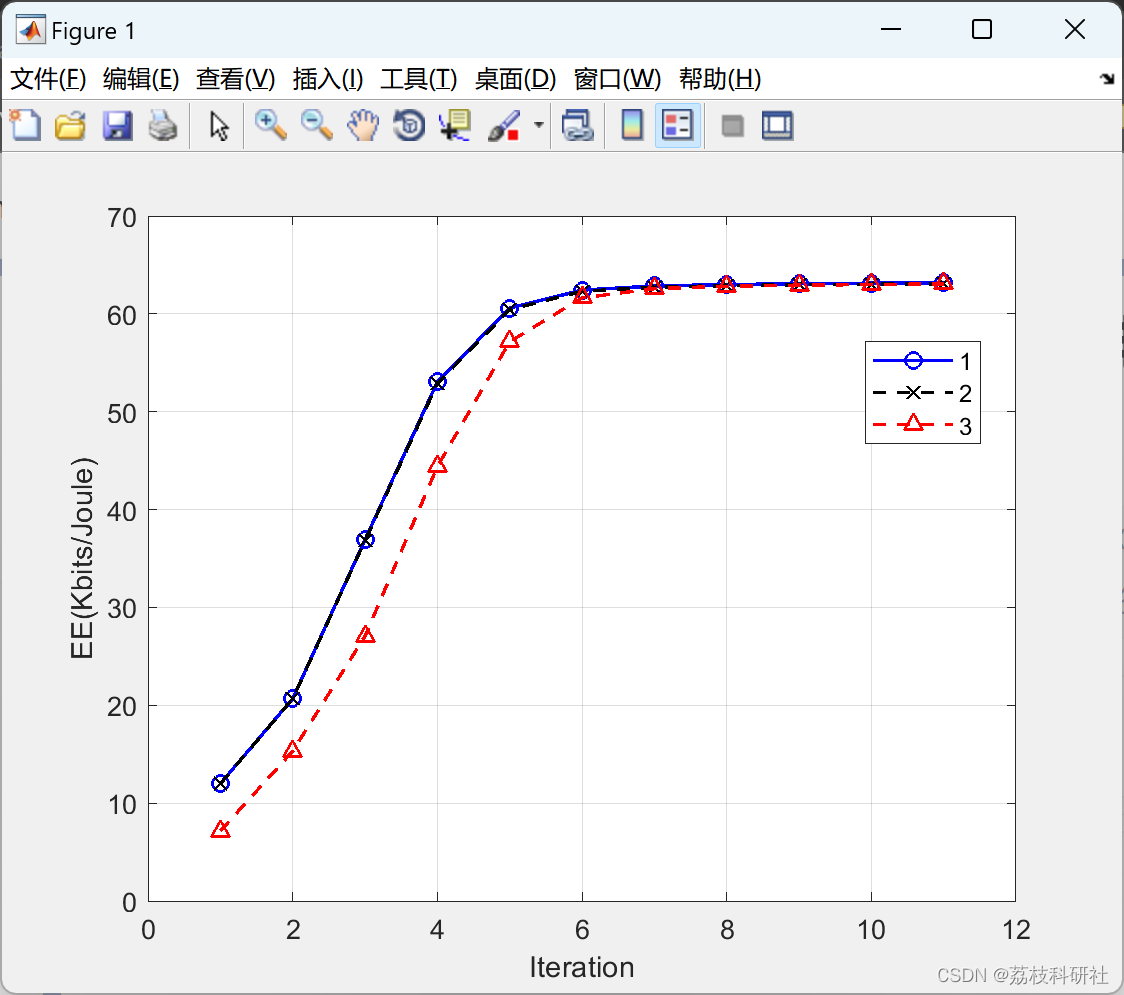
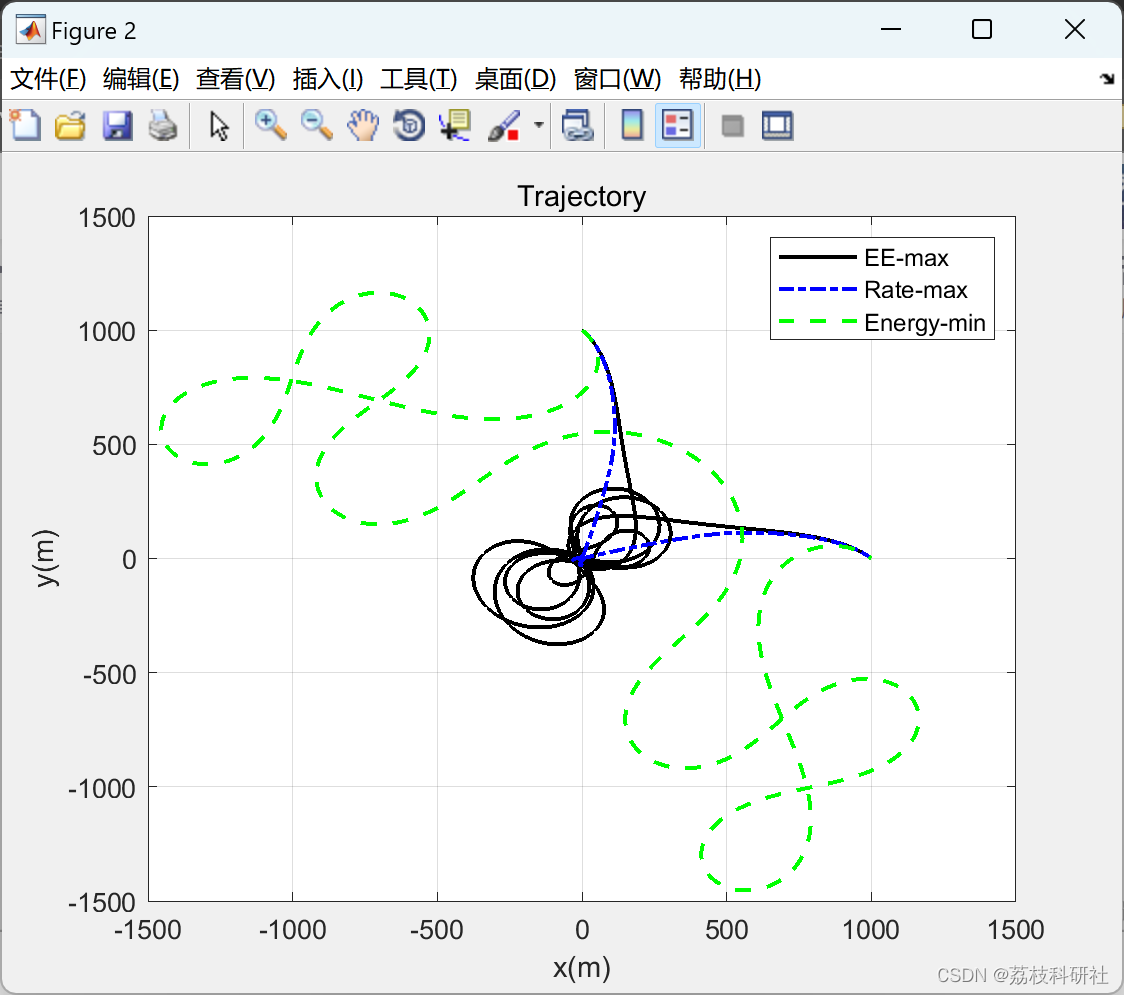
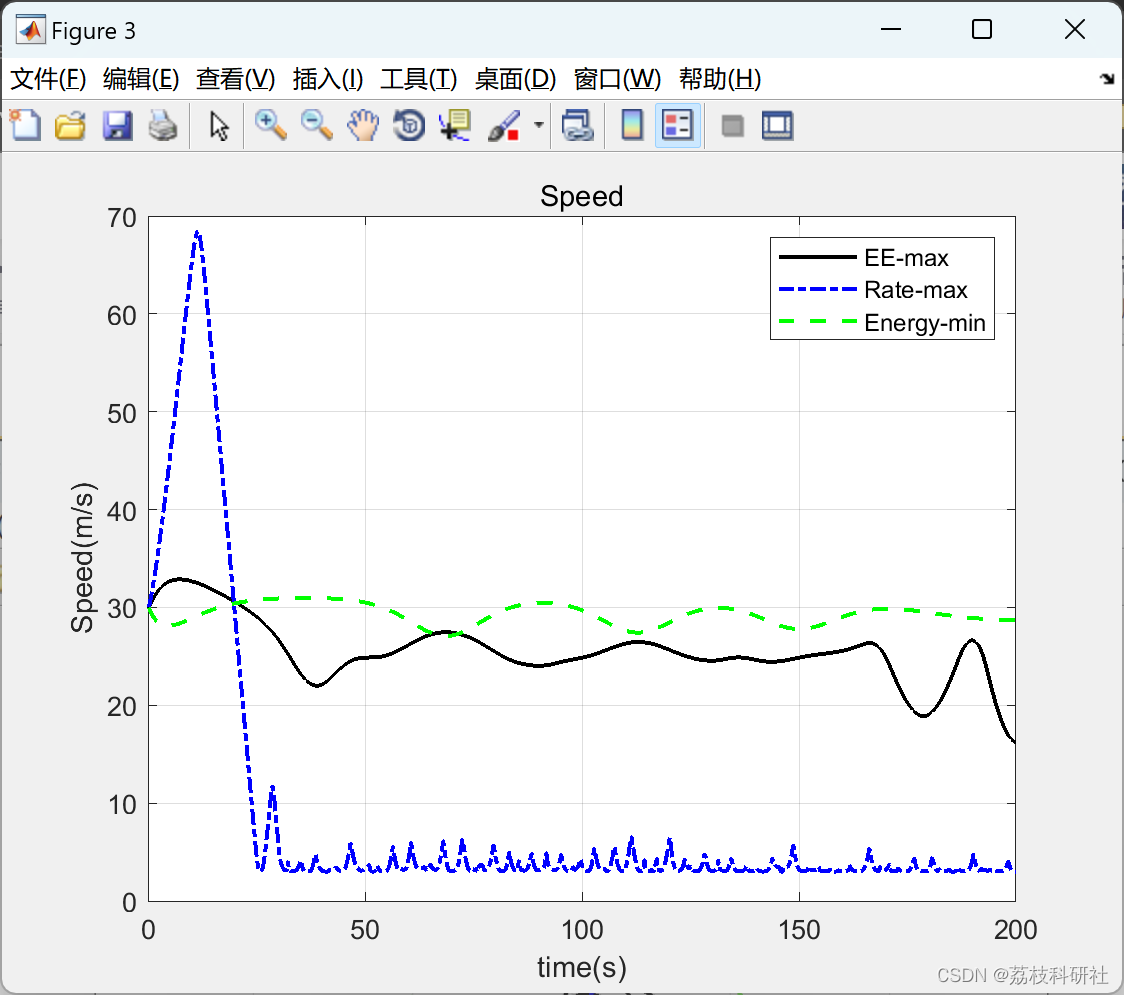
2.2 Matlab代码复现结果
部分代码:
%Main_Constrained_trajectory
%1.UAV 参数
H = 100; %m
c1 = 9.26*1e-4;
c2 = 2250;
q0 = [0,1000].';%初始位置
qF = [1000,0].';%结束位置
v_0F = (qF-q0)/norm(qF-q0,2); %%初始和结束的单位速度方向
v0 = 30*v_0F; %初始速度 m/s
vF = v0; %结束速度
Vmax = 100; %最大速度
Vmin = 3; %最小速度,保证在空中飞行
amax = 5; %最大加速度 m/s^2
T = 400; %观察周期
deltat = 0.2; %离散采样间隔
g = 9.8; %重力加速度
N = T/deltat;
%2.Communication 参数
B = 1e6; %带宽 MHz
N0dBm = -170; %噪声功率谱dBm/Hz
N0 = 10^(N0dBm/10);
sigma2 = N0*B; %噪声功率
PdBm = 10; %无人机发射功率(固定)
P = 10^(PdBm/10);
beta0dB = -50; %1m参考距离对应路损
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]J. Yang, J. Chen and Z. Yang, "Energy-Efficient UAV Communication With Trajectory Optimization," 2021 2nd International Conference on Big Data & Artificial Intelligence & Software Engineering (ICBASE), Zhuhai, China, 2021, pp. 508-514, doi: 10.1109/ICBASE53849.2021.00100.
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









