






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
多旋翼无人机姿态控制系统的稳健设计旨在确保无人机在各种环境条件下都能保持稳定的飞行姿态,并具有对外部扰动和系统参数变化的鲁棒性。稳健设计的第一步是准确地建立多旋翼无人机的动态模型,并对模型参数进行识别。这涉及到对无人机的飞行动力学、惯性特性和传感器响应等进行建模和分析。稳健的姿态控制器应当能够有效地处理外部扰动、飞行任务变化以及传感器误差等因素。常用的控制器设计方法包括基于PID控制器、模型预测控制(MPC)、自适应控制和鲁棒控制等。这些控制器需要在设计过程中考虑到系统参数变化和外部干扰,以确保控制性能的稳定性和鲁棒性。多旋翼无人机姿态控制系统的稳健设计涉及到对动态建模、控制器设计、传感器融合与滤波、仿真验证以及故障检测与容错控制等多个方面的考虑,以确保无人机能够在各种条件下实现稳定、可靠的飞行。
📚2 运行结果
主函数部分代码:
clear all;
close all;
clc;
%% DATA
s=tf('s');
g=9.81;
% Stability derivatives
Yv=ureal('Yv',-0.264,'Perc',3*4.837);
Yp=0;
Lv=ureal('Lv',-7.349,'Perc',3*4.927);
Lp=0;
% Control derivatives
Yd=ureal('Yd',9.568,'Perc',3*4.647);
Ld=ureal('Ld',1079.339,'Perc',3*2.762);
% N.B====> use 3*sigma in the Gaussian distribution because our
% requirements must be satisfied in +-3*sigma
%% DEFINE THE LATERAL DYNAMICS STATE SPACE SYSTEM
A=[Yv Yp g
Lv Lp 0
0 1 0];
B=[Yd Ld 0]';
C=[0 1 0
0 0 1];
D=[0 0]';
states={'v','p','phi'};
input={'Delta lat'};
outputs={'p','phi'};
G=ss(A,B,C,D,'statename',states,'inputname',input,'outputname',outputs); % uncertain plant in SS form
Gn=G.NominalValue; % nominal plant in SS form
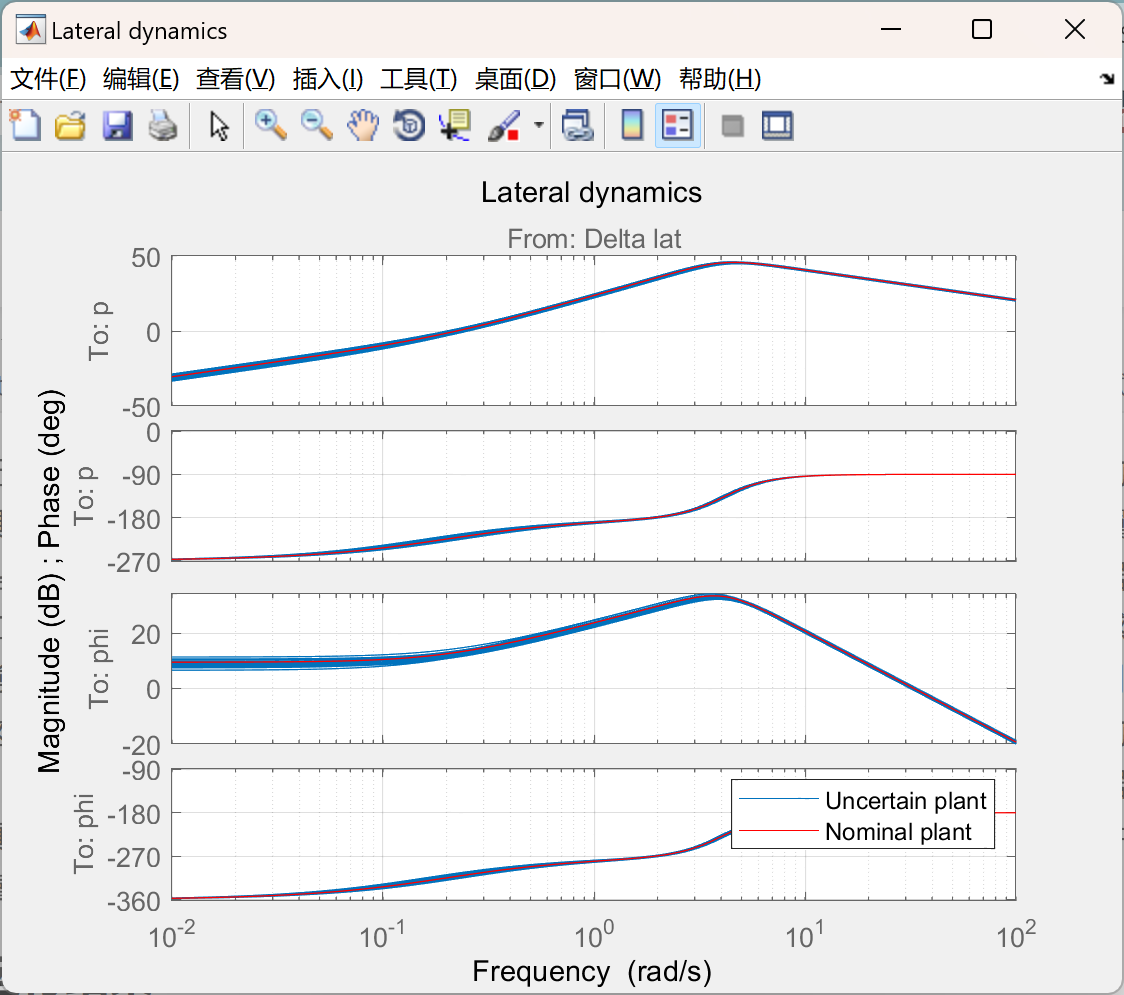
figure('Name','Lateral dynamics','NumberTitle','off'), bode(G), grid on, hold on;
bode(Gn,'r'), legend('Uncertain plant','Nominal plant');
title('Lateral dynamics');
figure('Name','Step response of uncertain and nominal plan','NumberTitle','off'), step(G), grid on, hold on
step(Gn), legend('Uncertain plant','Nominal plant')
title('Step response of uncertain and nominal plant');
disp('PROPERTIES OF LATERAL DYNAMICS');
damp(G) % is unstable!!!!!
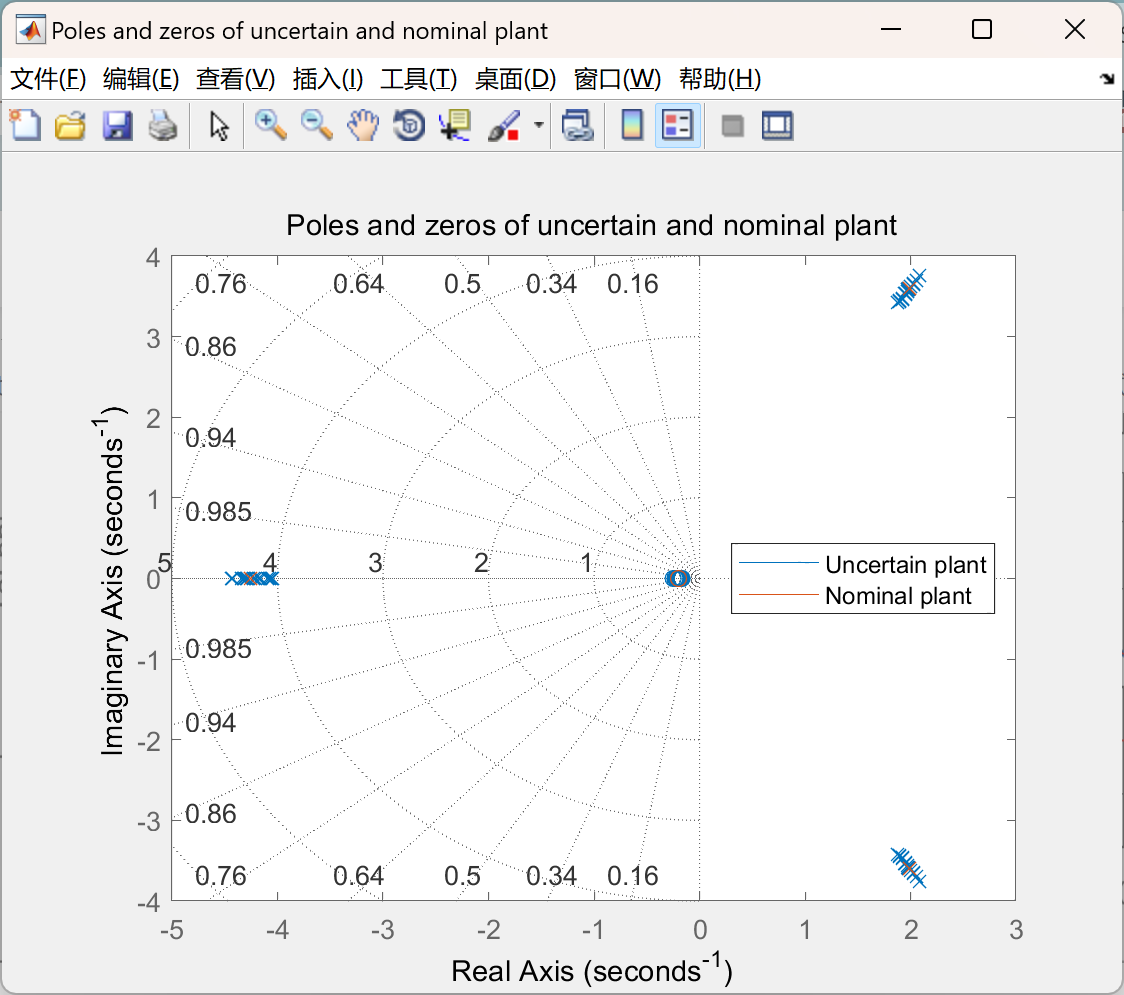
figure('Name','Poles and zeros of uncertain and nominal plant','NumberTitle','off'), pzmap(G), grid on, hold on;
pzmap(Gn), legend('Uncertain plant','Nominal plant','Location','East');
title('Poles and zeros of uncertain and nominal plant');
%% DESIGN APPROACHES: SYSTUNE
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]岳鹍,张月新,宋光坤.基于虚拟力分析的全柔性共轴旋翼无人机路径跟踪方法[J/OL].实验技术与管理:1-11[2024-04-27].http://kns.cnki.net/kcms/detail/11.2034.T.20240425.1624.002.html.
[2]邹世培,王玉惠,刘鸿睿.基于RF-XGBoost算法的无人机多回合攻防博弈决策[J/OL].系统工程与电子技术:1-10[2024-04-27].http://kns.cnki.net/kcms/detail/11.2422.tn.20240424.1414.002.html.
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









