






1.用法很简单只需要调用一个API就行
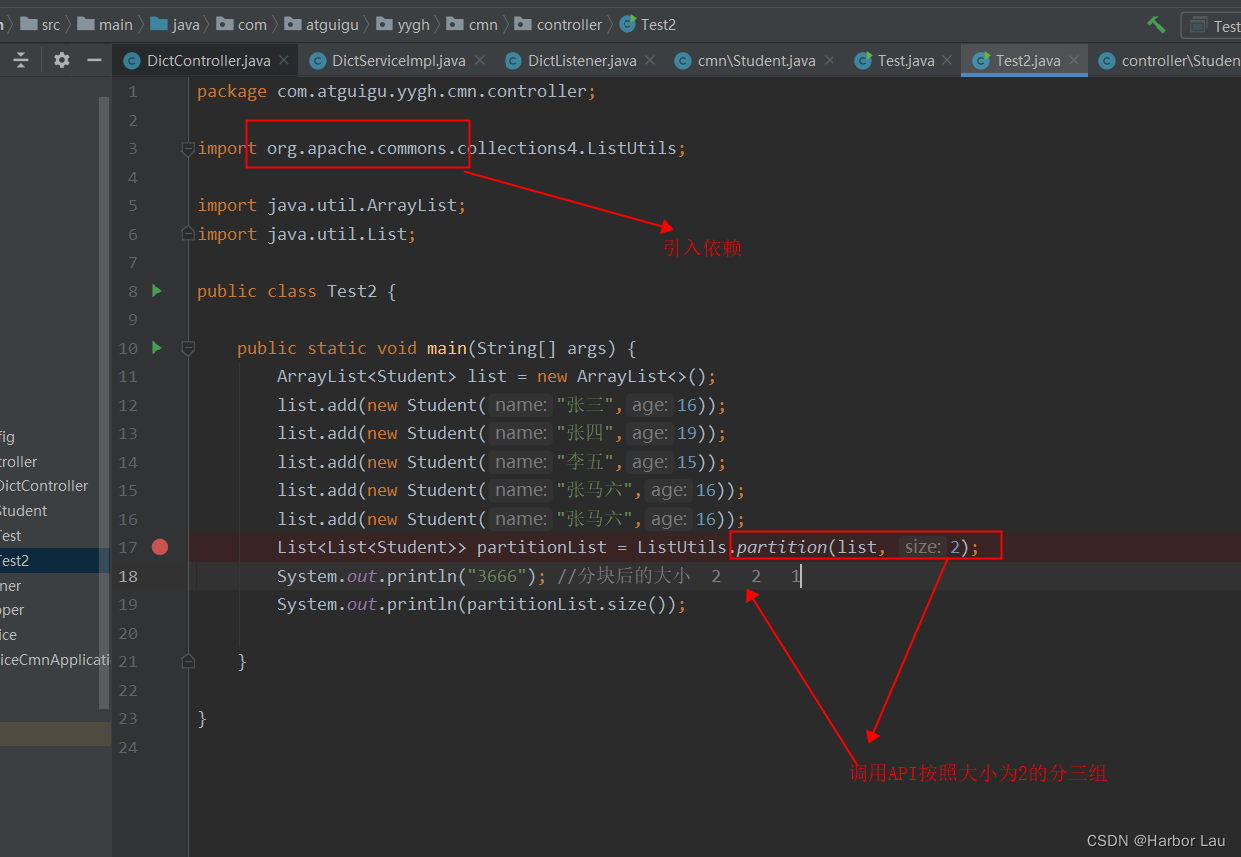
package com.atguigu.yygh.cmn.controller;
import org.apache.commons.collections4.ListUtils;
import java.util.ArrayList;
import java.util.List;
public class Test2 {
public static void main(String[] args) {
ArrayList<Student> list = new ArrayList<>();
list.add(new Student("张三",16));
list.add(new Student("张四",19));
list.add(new Student("李五",15));
list.add(new Student("张马六",16));
list.add(new Student("张马六",16));
List<List<Student>> partitionList = ListUtils.partition(list, 2);
System.out.println("3666"); //分块后的大小 2 2 1
System.out.println(partitionList.size());
}
}















 1266
1266











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









