







声明:部分信息来源网络,无法保证信息的绝对性完整与准确,仅作为一种记录与参考
第一章
1.摄影测量学定义
摄影测量学是一门工艺、科学与技术,它通过非接触成像系统,经过记录、量测、分析与表达等处理步骤,来获取地球及其环境和其他物体的几何、属性等可靠信息。
2.摄影测量学的任务
地形测量领域
-
制作各种比例尺的地形图、专题图、特种地图、正射影像地图、景观图。
-
建立各种数据库。
-
提供地理信息系统和土地信息系统所需的基础数据。
非地形测量领域
-
应用在生物医学、公安侦破、古文物、古建筑、建筑物变形监测等领域。
3.摄影测量的三个发展阶段及其特点
(1)模拟摄影测量阶段
- 使用硬拷贝像片作为影像资料。
- 利用光学机械模拟装置实现复杂的摄影测量解算。
- 主要得到模拟产品。
- 摄影测量科技的发展主要围绕昂贵的立体测图仪进行。
- 利用几何反转原理建立缩小模型。
- 最直观,易于理解。
(2)解析摄影测量阶段
- 使用硬拷贝像片作为影像资料。
- 使用数字投影方式,用精确的数字解算代替模拟解算。
- 得到模拟产品和数字产品。
- 引入半自动化的机助作业,免除了定向的繁琐过程及测图过程中的许多手工作业方式,但仍需人工操作和观测。
(3)数字摄影测量阶段
- 使用数字化影像作为资料。
- 使用数字投影方式。
- 得到数字产品和模拟产品。
- 实现自动化操作,人员仅做辅助。
-
数字摄影测量与模拟、解析摄影测量的根本区别
-
原始资料不同
数字摄影测量使用数字影像,而模拟和解析摄影测量使用硬拷贝影像。
-
投影方式不同
数字摄影测量采用数字投影,而模拟和解析摄影测量采用物理投影。
-
操作方式不同
数字摄影测量实现自动化操作,人员仅做辅助;而模拟和解析摄影测量则需要人工进行操作。
-
三种发展阶段对比
| 发展阶段 | 原始资料 | 投影方式 | 仪 器 | 操作方式 | 产 品 |
| 模拟摄影测量 | 像片 | 物理投影 | 模拟测图仪 | 作业员手工 | 模拟产品 |
| 解析摄影测量 | 像片 | 数字投影 | 解析测图仪 | 机助作业员 | 模拟产品 数字产品 |
| 数字摄影测量 | 数字化影像 数字影像 | 数字投影 | 计算机 | 自动化操作加作业员的干预 | 数字产品 模拟产品 |
第二章
1.航摄资料的基本要求
- 航影仪应安装在飞机的一定角度,飞行航线一般为东西方向。
- 相邻两像片要有60%左右的重叠度,相邻两航线间要有30%左右的重叠度。
- 航摄机在摄影曝光的瞬间物镜主光轴保持垂直地面。
- 像片倾角不大于2°,最大不超过3°。
- 航摄最大偏距ΔL与全航线长L之比不大于3%。
- 像片旋角K不超过6”,最大不超过8°。
计算题
- 对于18cm18cm的像片,航向重叠度为18cm60%,旁向重叠度为18cm*30%。
- 对于23cm23cm的像片,航向重叠度为23cm60%,旁向重叠度为23cm*30%。
2.空中摄影质量评定
- 检查航向、旁向重叠度是否达到要求。
- 检查航向弯曲是否超过3%。
- 检查像片旋角是否小于等于6°,个别不大于8°。
3.造成像片上影像产生误差的因素及改正
因素:
- 地面地形起伏。
- 像片倾斜,产生像片位移。
- 航线偏离各张像片的主点连线。
4.摄影测量中常用的坐标系及其用途
(1)像方空间坐标系
1)像平面坐标系
- 用以表示像点在像平面上的位置,通常采用右手坐标系。
- 根据框标来确定像平面坐标系,称为像框标坐标系。
2)像空间坐标系
- 描述像点在像空间位置的坐标系,以摄影中心S为坐标原点。
- x, y轴与像平面坐标系的x, y轴平行,z轴与主光轴重合。
3)像空间辅助坐标系
- 相对统一的坐标系,用S-UVW表示。
- 原点仍选在摄影中心S,坐标轴依情况而定。
(2)物方空间坐标系
1)摄影测量坐标系
- 将像空间辅助坐标系S-XYZ沿着z轴反方向平移至地面。
2)地面测量坐标系
- 国家测图所采用的高斯-克吕格3带或6带投影的平面直角坐标系和高程系。
3)地面摄影测量坐标系
- 过渡性的坐标系,用以连接摄影测量坐标系与地面测量坐标系。
- 原点在测区内的某一地面点上,X轴与航向一致,Y轴与X轴正交,Z轴沿铅垂方向。
(3)摄影测量中两大类坐标系
像方坐标系
- 用于描述像点的位置,包括像平面坐标系、像空间坐标系和像空间辅助坐标系。
物方坐标系
- 用于描述地面点的位置,包括地面测量坐标系和地面摄影测量坐标系。
坐标系之间的关系
-
像方坐标系与物方坐标系之间的关系是通过摄影测量坐标系和地面摄影测量坐标系来实现转换的。
5.共线条件方程
1)定义 共线条件方程是利用中心投影构像,将地图与像片上的点连接的方程式。
2)数学表达式 共线条件方程的数学表达式为:
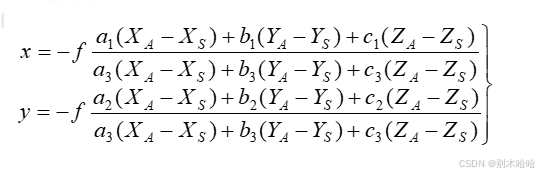
其中:是像点的像平面坐标,
是对应地面点的物方空间坐标,
是摄影中心的物方空间坐标,
是像片的内方位元素,
是摄影机的焦距。
3)应用 共线条件方程在摄影测量中的主要应用包括:
- 单片后方交会和立体模型的空间前方交会。
- 求像底点的坐标。
- 光束法平差中的基本方程。
- 解析测图仪中的数字投影器。
- 航空摄影模拟。
- 利用DEM进行单张像片测图。
6.单像空间后方交会
1)定义 单像空间后方交会是利用影像覆盖范围内一定数量的分布合理的地面控制点的空间坐标与影像坐标,根据共线条件方程,反求该影像的外方位元素的方法。
2)观测值
- 从摄影资料查找像片的比例
,平均航高,内方位元素
。
- 从外业测量成果中,获取控制点的地面测量坐标
,并转换为地面摄影测量坐标
。
3)未知数
是摄影中心的物方空间坐标。
是摄影机的外方位元素(欧拉角)。
4)控制点数量
- 至少需要三个已知地面控制点,因为一个控制点与其对应的影像坐标可以得到两个方程,从而共需要至少三个已知控制点来解出六个未知数。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









