.h
#ifndef __W25Qxx_H
#define __W25Qxx_H
/* Includes ------------------------------------------------------------------*/
#include "stm32f1xx_hal.h"
/* W25QXX Configuration */
extern SPI_HandleTypeDef w25qxx_hspi;
#define W25QXX_SPI_PORT 1 // 1 spi1 2 spi2 3 spi3
#ifdef W25QXX_SPI_PORT
#if (1 == W25QXX_SPI_PORT)
#define W25QXX_SPI_CLK_ENABLE() __HAL_RCC_SPI1_CLK_ENABLE()
#define W25QXX_SPI_INSTANCE SPI1
#elif (2 == W25QXX_SPI_PORT)
#define W25QXX_SPI_CLK_ENABLE() __HAL_RCC_SPI2_CLK_ENABLE()
#define W25QXX_SPI_INSTANCE SPI2
#elif (3 == W25QXX_SPI_PORT)
#define W25QXX_SPI_CLK_ENABLE() __HAL_RCC_SPI3_CLK_ENABLE()
#define W25QXX_SPI_INSTANCE SPI3
#endif
#endif
#define W25QXX_CS_Pin GPIO_PIN_4
#define W25QXX_CS_GPIO_Port GPIOA
/*W25QXX FLASH memory*/
#define W25QXX_FLASH_ADDRESS 0x000000
/* W25QXX Sector Size and Page Size */
#define W25QXX_PAGE_SIZE 0x100 /* 65536 pages of 256 bytes */
#define W25QXX_SECTOR_SIZE 0x1000 /* 4096 sectors of 4096 bytes */
/* W25QXX OFFSET USE FOR YMODEM*/
#define W25QXX_YMODEM_OFFSET W25QXX_FLASH_ADDRESS + W25QXX_SECTOR_SIZE
/*Wait time for different operations*/
#define W25QXX_BULK_ERASE_MAX_TIME 250000
#define W25QXX_BLOCK_ERASE_MAX_TIME 3000
#define W25QXX_SECTOR_ERASE_MAX_TIME 800
#define W25QXX_TIMEOUT_VALUE 1000
/* Identification Operations */
#define W25QXX_READ_MANUFACTURER_ID_CMD 0x90
#define W25QXX_READ_JEDEC_ID_CMD 0x9F
/* Read Operations */
#define W25QXX_READ_CMD 0x03
#define W25QXX_FAST_READ_CMD 0x0B
#define W25QXX_DUAL_OUT_FAST_READ_CMD 0x3B
/* Write Operations */
#define W25QXX_WRITE_ENABLE_CMD 0x06
#define W25QXX_WRITE_DISABLE_CMD 0x04
/* Register Operations */
#define W25QXX_READ_STATUS_REG1_CMD 0x05
#define W25QXX_WRITE_STATUS_REG1_CMD 0x01
/* Program Operations */
#define W25QXX_PAGE_PROG_CMD 0x02
/* Erase Operations */
#define W25QXX_BLOCK_ERASE_CMD 0xD8
#define W25QXX_SECTOR_ERASE_CMD 0x20
#define W25QXX_CHIP_ERASE_CMD 0xC7
/* Flag Status Register */
#define W25QXX_FSR_BUSY ((uint8_t)0x01) /*!< busy */
#define W25QXX_FSR_WREN ((uint8_t)0x02) /*!< write enable */
#define W25QXX_FSR_QE ((uint8_t)0x02) /*!< quad enable */
#define W25QXX_Enable() HAL_GPIO_WritePin(W25QXX_CS_GPIO_Port, W25QXX_CS_Pin, GPIO_PIN_RESET)
#define W25QXX_Disable() HAL_GPIO_WritePin(W25QXX_CS_GPIO_Port, W25QXX_CS_Pin, GPIO_PIN_SET)
#define W25QXX_OK ((uint8_t)0x00)
#define W25QXX_ERROR ((uint8_t)0x01)
#define W25QXX_BUSY ((uint8_t)0x02)
#define W25QXX_TIMEOUT ((uint8_t)0x03)
uint8_t W25QXX_Init(void);
uint8_t W25QXX_WriteEnable(void);
uint8_t W25QXX_WriteDisable(void);
void W25QXX_Read_Manufacturer_ID(uint8_t *ID);
void W25QXX_Read_JEDEC_ID(uint8_t *ID);
uint8_t W25QXX_Read(uint8_t *pData, uint32_t ReadAddr, uint32_t Size);
uint8_t W25QXX_Write(uint8_t *pData, uint32_t WriteAddr, uint32_t Size);
uint8_t W25QXX_Erase_Block(uint32_t Address);
uint8_t W25QXX_Erase_Sector(uint32_t Address);
/*test*/
#define W25QXX_TEST 1
#if W25QXX_TEST
void W25QXX_test(void);
#endif
#endif
/******************how to use *******************/
/*
W25QXX_Init();
W25QXX_test();
*/
.c
#include "w25qxx.h"
SPI_HandleTypeDef w25qxx_hspi;
/**
* @brief 获取Flash状态
* @return {*}
*/
static uint8_t W25QXX_GetStatus(void)
{
uint8_t cmd = W25QXX_READ_STATUS_REG1_CMD;
uint8_t status;
W25QXX_Enable();
/* Send the read status command */
HAL_SPI_Transmit(&w25qxx_hspi, &cmd, 1, W25QXX_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&w25qxx_hspi, &status, 1, W25QXX_TIMEOUT_VALUE);
W25QXX_Disable();
/* Check the value of the register */
return status;
}
static uint8_t W25QXX_Wait_Busy(void)
{
uint32_t tickstart = HAL_GetTick();
while ((W25QXX_GetStatus() & W25QXX_FSR_BUSY) == 1)
{
#if SYS_SUPPORT_OS
if (xTaskGetSchedulerState() == taskSCHEDULER_RUNNING)
{
vTaskDelay(1);
}
#endif
if (HAL_GetTick() - tickstart > W25QXX_TIMEOUT_VALUE)
{
return W25QXX_TIMEOUT;
}
}
return W25QXX_OK;
}
uint8_t W25QXX_Init(void)
{
W25QXX_SPI_CLK_ENABLE();
w25qxx_hspi.Instance = W25QXX_SPI_INSTANCE;
w25qxx_hspi.Init.Mode = SPI_MODE_MASTER;
w25qxx_hspi.Init.Direction = SPI_DIRECTION_2LINES;
w25qxx_hspi.Init.DataSize = SPI_DATASIZE_8BIT;
w25qxx_hspi.Init.CLKPolarity = SPI_POLARITY_LOW;
w25qxx_hspi.Init.CLKPhase = SPI_PHASE_1EDGE;
w25qxx_hspi.Init.NSS = SPI_NSS_SOFT;
w25qxx_hspi.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
w25qxx_hspi.Init.FirstBit = SPI_FIRSTBIT_MSB;
w25qxx_hspi.Init.TIMode = SPI_TIMODE_DISABLE;
w25qxx_hspi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
w25qxx_hspi.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&w25qxx_hspi) != HAL_OK)
{
Error_Handler();
}
/**SPI1 GPIO Configuration
PA4 ------> SPI1_NSS
PA5 ------> SPI1_SCK
PA6 ------> SPI1_MISO
PA7 ------> SPI1_MOSI
*/
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct = {0};
HAL_GPIO_WritePin(W25QXX_CS_GPIO_Port, W25QXX_CS_Pin, GPIO_PIN_SET);
GPIO_InitStruct.Pin = W25QXX_CS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(W25QXX_CS_GPIO_Port, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_5 | GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
return 1;
}
uint8_t W25QXX_WriteEnable(void)
{
uint8_t cmd[1] = {W25QXX_WRITE_ENABLE_CMD};
/*Select the FLASH: Chip Select low */
W25QXX_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&w25qxx_hspi, cmd, 1, W25QXX_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25QXX_Disable();
/* Wait the end of Flash writing */
return W25QXX_Wait_Busy();
}
uint8_t W25QXX_WriteDisable(void)
{
uint8_t cmd = W25QXX_WRITE_DISABLE_CMD;
W25QXX_Enable();
HAL_SPI_Transmit(&w25qxx_hspi, &cmd, 1, W25QXX_TIMEOUT_VALUE);
W25QXX_Disable();
return W25QXX_Wait_Busy();
}
/**
* @brief : 读取制造/器件ID
* @param {uint8_t} *ID
* @return {*}
*/
void W25QXX_Read_Manufacturer_ID(uint8_t *ID)
{
uint8_t cmd[4] = {W25QXX_READ_MANUFACTURER_ID_CMD, 0x00, 0x00, 0x00};
W25QXX_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&w25qxx_hspi, cmd, 4, W25QXX_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&w25qxx_hspi, ID, 2, W25QXX_TIMEOUT_VALUE);
W25QXX_Disable();
}
/**
* @brief :读取JEDEC的ID 一共3个字节
* @param {uint8_t} *ID
* @return {*}
*/
void W25QXX_Read_JEDEC_ID(uint8_t *ID)
{
uint8_t cmd = W25QXX_READ_JEDEC_ID_CMD;
W25QXX_Enable();
HAL_SPI_Transmit(&w25qxx_hspi, &cmd, 1, W25QXX_TIMEOUT_VALUE);
HAL_SPI_Receive(&w25qxx_hspi, ID, 3, W25QXX_TIMEOUT_VALUE);
W25QXX_Disable();
}
uint8_t W25QXX_Read(uint8_t *pData, uint32_t ReadAddr, uint32_t Size)
{
uint8_t cmd[4];
/* Configure the command */
cmd[0] = W25QXX_READ_CMD;
cmd[1] = (uint8_t)(ReadAddr >> 16);
cmd[2] = (uint8_t)(ReadAddr >> 8);
cmd[3] = (uint8_t)(ReadAddr);
W25QXX_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&w25qxx_hspi, cmd, 4, W25QXX_TIMEOUT_VALUE);
/* Reception of the data */
if (HAL_SPI_Receive(&w25qxx_hspi, pData, Size, W25QXX_TIMEOUT_VALUE) != HAL_OK)
{
return W25QXX_ERROR;
}
W25QXX_Disable();
return W25QXX_OK;
}
uint8_t W25QXX_Write(uint8_t *pData, uint32_t WriteAddr, uint32_t Size)
{
uint8_t cmd[4];
uint32_t end_addr, current_size, current_addr;
/* Calculation of the size between the write address and the end of the page */
current_addr = 0;
while (current_addr <= WriteAddr)
{
current_addr += W25QXX_PAGE_SIZE;
}
current_size = current_addr - WriteAddr;
/* Check if the size of the data is less than the remaining place in the page */
if (current_size > Size)
{
current_size = Size;
}
/* Initialize the adress variables */
current_addr = WriteAddr;
end_addr = WriteAddr + Size;
/* Perform the write page by page */
do
{
/* Configure the command */
cmd[0] = W25QXX_PAGE_PROG_CMD;
cmd[1] = (uint8_t)(current_addr >> 16);
cmd[2] = (uint8_t)(current_addr >> 8);
cmd[3] = (uint8_t)(current_addr);
/* Enable write operations */
W25QXX_WriteEnable();
W25QXX_Enable();
/* Send the command */
if (HAL_SPI_Transmit(&w25qxx_hspi, cmd, 4, W25QXX_TIMEOUT_VALUE) != HAL_OK)
{
return W25QXX_ERROR;
}
/* Transmission of the data */
if (HAL_SPI_Transmit(&w25qxx_hspi, pData, current_size, W25QXX_TIMEOUT_VALUE) != HAL_OK)
{
return W25QXX_ERROR;
}
W25QXX_Disable();
/* Wait the end of Flash writing */
if (W25QXX_Wait_Busy() != W25QXX_OK)
{
return W25QXX_TIMEOUT;
}
/* Update the address and size variables for next page programming */
current_addr += current_size;
pData += current_size;
current_size = ((current_addr + W25QXX_PAGE_SIZE) > end_addr) ? (end_addr - current_addr) : W25QXX_PAGE_SIZE;
} while (current_addr < end_addr);
return W25QXX_OK;
}
uint8_t W25QXX_Erase_Block(uint32_t Address)
{
uint8_t cmd[4];
cmd[0] = W25QXX_BLOCK_ERASE_CMD;
cmd[1] = (uint8_t)(Address >> 16);
cmd[2] = (uint8_t)(Address >> 8);
cmd[3] = (uint8_t)(Address);
/* Enable write operations */
W25QXX_WriteEnable();
/*Select the FLASH: Chip Select low */
W25QXX_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&w25qxx_hspi, cmd, 4, W25QXX_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25QXX_Disable();
/* Wait the end of Flash writing */
if (W25QXX_Wait_Busy() != W25QXX_OK)
{
return W25QXX_TIMEOUT;
}
return W25QXX_OK;
}
uint8_t W25QXX_Erase_Sector(uint32_t Address)
{
uint8_t cmd[4];
cmd[0] = W25QXX_SECTOR_ERASE_CMD;
cmd[1] = (uint8_t)(Address >> 16);
cmd[2] = (uint8_t)(Address >> 8);
cmd[3] = (uint8_t)(Address);
/* Enable write operations */
W25QXX_WriteEnable();
/*Select the FLASH: Chip Select low */
W25QXX_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&w25qxx_hspi, cmd, 4, W25QXX_TIMEOUT_VALUE);
/*Deselect the FLASH: Chip Select high */
W25QXX_Disable();
/* Wait the end of Flash writing */
if (W25QXX_Wait_Busy() != W25QXX_OK)
{
return W25QXX_TIMEOUT;
}
return W25QXX_OK;
}
#if W25QXX_TEST
void W25QXX_test(void)
{
uint8_t Manufacturer_ID, w25qxx_read_buf[20], i;
uint8_t w25qxx_write_buf[20] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A, 0x0B, 0x0C, 0x0D, 0x0E, 0x0F, 0x10, 0x11, 0x12, 0x13, 0x14};
W25QXX_Read_Manufacturer_ID(&Manufacturer_ID);
USART1_printf("Manufacturer ID: %d\r\n", Manufacturer_ID);
W25QXX_Read(w25qxx_read_buf, 0x000000, 20);
for (i = 0; i < 20; i++)
{
USART1_printf("0x%x ", w25qxx_read_buf[i]);
}
USART1_printf("\r\n");
W25QXX_Erase_Sector(0x000000);
W25QXX_Read(w25qxx_read_buf, 0x000000, 20);
for (i = 0; i < 20; i++)
{
USART1_printf("0x%x ", w25qxx_read_buf[i]);
}
USART1_printf("\r\n");
W25QXX_Write(w25qxx_write_buf, 0x000000, 20);
W25QXX_Read(w25qxx_read_buf, 0x000000, 20);
for (i = 0; i < 20; i++)
{
USART1_printf("0x%x ", w25qxx_read_buf[i]);
}
USART1_printf("\r\n");
}
#endif
// /**********************************************************************************
// * ��������: оƬ����
// */
// uint8_t BSP_W25Qx_Erase_Chip(void)
// {
// uint8_t cmd[4];
// uint32_t tickstart = HAL_GetTick();
// cmd[0] = CHIP_ERASE_CMD;
// /* Enable write operations */
// BSP_W25Qx_WriteEnable();
// /*Select the FLASH: Chip Select low */
// W25Qx_Enable();
// /* Send the read ID command */
// HAL_SPI_Transmit(&w25qxx_hspi, cmd, 1, W25Qx_TIMEOUT_VALUE);
// /*Deselect the FLASH: Chip Select high */
// W25Qx_Disable();
// /* Wait the end of Flash writing */
// while (BSP_W25Qx_GetStatus() != W25Qx_BUSY)
// ;
// {
// /* Check for the Timeout */
// if ((HAL_GetTick() - tickstart) > W25QXX_BULK_ERASE_MAX_TIME)
// {
// return W25Qx_TIMEOUT;
// }
// }
// return W25Qx_OK;
// }
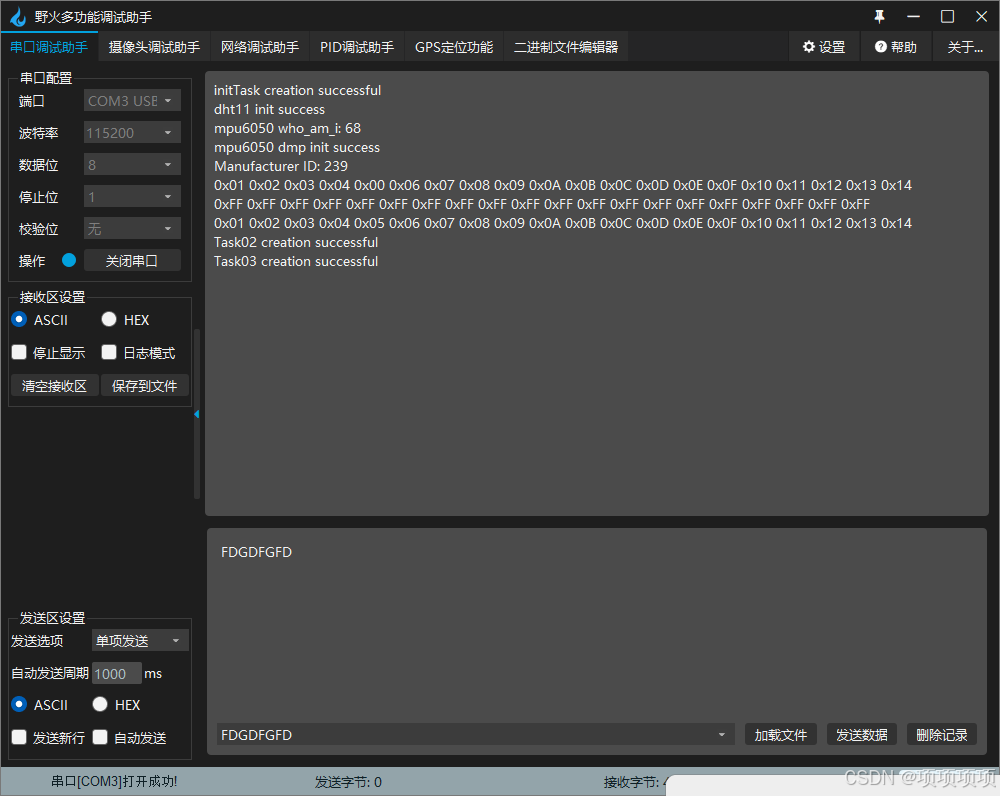
使用测试
void W25QXX_test(void)
{
uint8_t Manufacturer_ID, w25qxx_read_buf[20], i;
uint8_t w25qxx_write_buf[20] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A, 0x0B, 0x0C, 0x0D, 0x0E, 0x0F, 0x10, 0x11, 0x12, 0x13, 0x14};
W25QXX_Read_Manufacturer_ID(&Manufacturer_ID);
USART1_printf("Manufacturer ID: %d\r\n", Manufacturer_ID);
W25QXX_Read(w25qxx_read_buf, 0x000000, 20);
for (i = 0; i < 20; i++)
{
USART1_printf("0x%x ", w25qxx_read_buf[i]);
}
USART1_printf("\r\n");
W25QXX_Erase_Sector(0x000000);
W25QXX_Read(w25qxx_read_buf, 0x000000, 20);
for (i = 0; i < 20; i++)
{
USART1_printf("0x%x ", w25qxx_read_buf[i]);
}
USART1_printf("\r\n");
W25QXX_Write(w25qxx_write_buf, 0x000000, 20);
W25QXX_Read(w25qxx_read_buf, 0x000000, 20);
for (i = 0; i < 20; i++)
{
USART1_printf("0x%x ", w25qxx_read_buf[i]);
}
USART1_printf("\r\n");
}
结果

























 1039
1039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









