






目录
参考
前言
本文是主要讲述在灰度图如何进行迁移学习的图像分类任务,采用的是钢材表面缺陷数据集,并且使用Resnet迁移学习进行训练。
一、数据集
本文采用的是钢材表面缺陷数据集,该数据集的特点有:
- 该数据集主要分有七类,在训练中分别用0到6代替其中的类型
- 该数据集全都是单通道的灰度图,图片后缀名为.bmp
- 该数据集经过分类训练集有2000张照片,测试集有400张
- 该数据集有training.csv,包括了训练集的id和label
数据集类别如图所示,从左到右分别为0、1、2、3、4、5、6类别:

training.csv部分内容如图所示:
二、数据预处理
1.将图片随机分到不同的文件夹
1.1 创建对应类别文件夹并且进行同类分类
- 创建一个TrainAll文件夹,其中包含0、1、2、3、4、5、6七个文件夹
- 输入混合的训练集图片路径,将混合的照片按照training.csv分到对应标签的文件夹
def integration():
"""根据csv文件构建文件夹"""
#读取csv文件,计算长度
data_x= pd.read_csv(filepath_or_buffer = 'training.csv', sep = ',')["Image_name /(.bmp)"].values
data_y= pd.read_csv(filepath_or_buffer = 'training.csv', sep = ',')["categories"].values
num = len(data_x)
#如果原路径存在该文件,先清空了,保证数据准确
if os.path.exists('TrainAll') :
shutil.rmtree('TrainAll')
#创建训练分类文件夹
for i in range(8):
i = str(i)
os.makedirs(os.path.join('TrainAll',i))
#输入混合图片路径
dir = input('请输入训练集的文件夹的路径:')
root = ''
for _root, _dirs, _files in os.walk(dir): # root为输入的文件夹名,dirs为子文件夹的名字,files为图片
root = _root
print("训练集上有{}张照片".format(len(_files)))
#对训练集上的数据进行分类
for j in range(8):
label = str(j)
for i in range(num) :
if data_y[i] == j:
i = ''+ str(i+1)+'.bmp'
shutil.copy(os.path.join(root,i), os.path.join('TrainAll',label))1.2 将训练数据按比例分开训练集和验证集
- 因为该数据集的测试集未公布,所以训练的过程中需要在训练集中划分出验证集
- 输入训练集和验证集的比例,代码会自动按照比例进行分配
def Classify ():
"""按比例分类训练集和测试集"""
dir = 'TrainAll'
proportion = input ('请输入训练集占全集(验证集和训练集总和)的比例(小数):') #输入比例
proportion = float(proportion)
if os.path.exists('data'):
shutil.rmtree('data') # 删除原文件夹,保证数据准确
print("正在分类")
for _root,_dirs,_files in os.walk(dir): # root为输入的文件夹名,dirs为子文件夹的名字,files为图片
for _name in _dirs: # 遍历
folder = os.path.join(_root,_name) # 将文件名和子文件名合成一个路径
moveFile(folder,_name,proportion) #划分新的数据集
print("分类完成!")
break #循环一次就行2.加载数据集和验证集
- 训练集和验证集分别进行不同的图像增强,分别进行加载数据
- 必须有transforms.Grayscale(1)读入灰度图,否则为RGB
- transforms.Normalize中的0.485, 0.229是在训练集中灰度图中计算得到的均值和方差
# 加载数据
data_transform = {
"train": transforms.Compose([transforms.Grayscale(1)
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize(0.485, 0.229, inplace=True)]),
"val": transforms.Compose([transforms.Grayscale(1)
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize(0.485, 0.229, inplace=True)])}
image_path = os.path.join("data")
train_dataset = datasets.ImageFolder(root=os.path.join(image_path, "train"),
transform=data_transform["train"])
train_num = len(train_dataset)
# {'0':0, '1':1, '2':2, '3':3, '4':4, '5':5, '6':6, '7':7}
list = train_dataset.class_to_idx
cla_dict = dict((val, key) for key, val in list.items())
# 写json文件,方便对应类别
json_str = json.dumps(cla_dict, indent=4)
with open('class_indices.json', 'w') as json_file:
json_file.write(json_str)
batch_size = 8
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size, shuffle=True,
num_workers=0)
validate_dataset = datasets.ImageFolder(root=os.path.join(image_path, "val"),
transform=data_transform["val"])
val_num = len(validate_dataset)
validate_loader = torch.utils.data.DataLoader(validate_dataset,
batch_size=batch_size, shuffle=False,
num_workers=0)
print("训练集有{}张照片, 测试集有{}张照片".format(train_num,val_num))二.模型加载
1.模型选择
- 在保证准确率的同时,提高分类速度,选择了resnet-18的模型结构
- 因为分类任务类似,因此使用resnet-18 提供的预训练权重进行训练
2.模型搭建
- 因为是灰度图,所以class resnet中的self.conv1中的输入通道应该为1
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_channel, out_channel, stride=1, downsample=None, **kwargs):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,
kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,
kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
self.downsample = downsample
def forward(self, x):
identity = x
if self.downsample is not None:
identity = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self,
block,
blocks_num,
num_classes=1000,
include_top=True,
groups=1,
width_per_group=64):
super(ResNet, self).__init__()
self.include_top = include_top
self.in_channel = 64
self.groups = groups
self.width_per_group = width_per_group
self.conv1 = nn.Conv2d(1, self.in_channel, kernel_size=7, stride=2,
padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(self.in_channel)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, blocks_num[0])
self.layer2 = self._make_layer(block, 128, blocks_num[1], stride=2)
self.layer3 = self._make_layer(block, 256, blocks_num[2], stride=2)
self.layer4 = self._make_layer(block, 512, blocks_num[3], stride=2)
if self.include_top:
self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # output size = (1, 1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
def _make_layer(self, block, channel, block_num, stride=1):
downsample = None
if stride != 1 or self.in_channel != channel * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.in_channel, channel * block.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(channel * block.expansion))
layers = []
layers.append(block(self.in_channel,
channel,
downsample=downsample,
stride=stride,
groups=self.groups,
width_per_group=self.width_per_group))
self.in_channel = channel * block.expansion
for _ in range(1, block_num):
layers.append(block(self.in_channel,
channel,
groups=self.groups,
width_per_group=self.width_per_group))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
if self.include_top:
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
def resnet18(num_classes=1000, include_top=True):
return ResNet(BasicBlock, [2, 2, 2, 2], num_classes=num_classes, include_top=include_top)3.实例化模型
- 将下载好的预训练权重放到与代码同以路径下,读入权重
- 将全连接层1000改为8
#加载模型
net = resnet18()
model_weight_path = "./resnet18-5c106cde.pth"
pre_state_dict = torch.load(model_weight_path)
new_state_dict = {}
#遍历修改模型的各个层
for k, v in net.state_dict().items():
# 如果原模型的层也在新模型的层里面, 那新模型就加载原先训练好的权重
if k in pre_state_dict.keys() and k != 'conv1.weight':
new_state_dict[k] = pre_state_dict[k]
net.load_state_dict(new_state_dict, False)
in_channel = net.fc.in_features
net.fc = nn.Linear(in_channel, 8)
net.to(device)三.损失函数
- 使用交叉熵损失函数
- 使用Afam学习率为0.0001的优化方法
#损失函数
loss_function = nn.CrossEntropyLoss()
params = [p for p in net.parameters() if p.requires_grad]
optimizer = optim.Adam(params, lr=0.0001)
四.训练
- 运用了tqdm进行可视化进程
- 方向梯度更新权重
- 比较验证集的准确率,保存准确率高的权重
#训练
for epoch in range(epochs):
net.train()
running_loss = 0.0
train_bar = tqdm(train_loader, file=sys.stdout)
for step, data in enumerate(train_bar):
images, labels = data
optimizer.zero_grad()
logits = net(images.to(device))
loss = loss_function(logits, labels.to(device))
loss.backward()
optimizer.step()
#可视化数据
running_loss += loss.item()
train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,epochs, loss)
#检测
net.eval()
acc = 0.0
with torch.no_grad():
val_bar = tqdm(validate_loader, file=sys.stdout)
for val_data in val_bar:
val_images, val_labels = val_data
outputs = net(val_images.to(device))
predict_y = torch.max(outputs, dim=1)[1]
acc += torch.eq(predict_y, val_labels.to(device)).sum().item()
val_bar.desc = "valid epoch[{}/{}]".format(epoch + 1,
epochs)
val_accurate = acc / val_num
print('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %
(epoch + 1, running_loss / train_steps, val_accurate))
#只保留最好的预测模型
if val_accurate > best_acc:
best_acc = val_accurate
torch.save(net.state_dict(), save_path)
print('训练完成!')
print('训练模型已保存到当前目录')五.训练结果
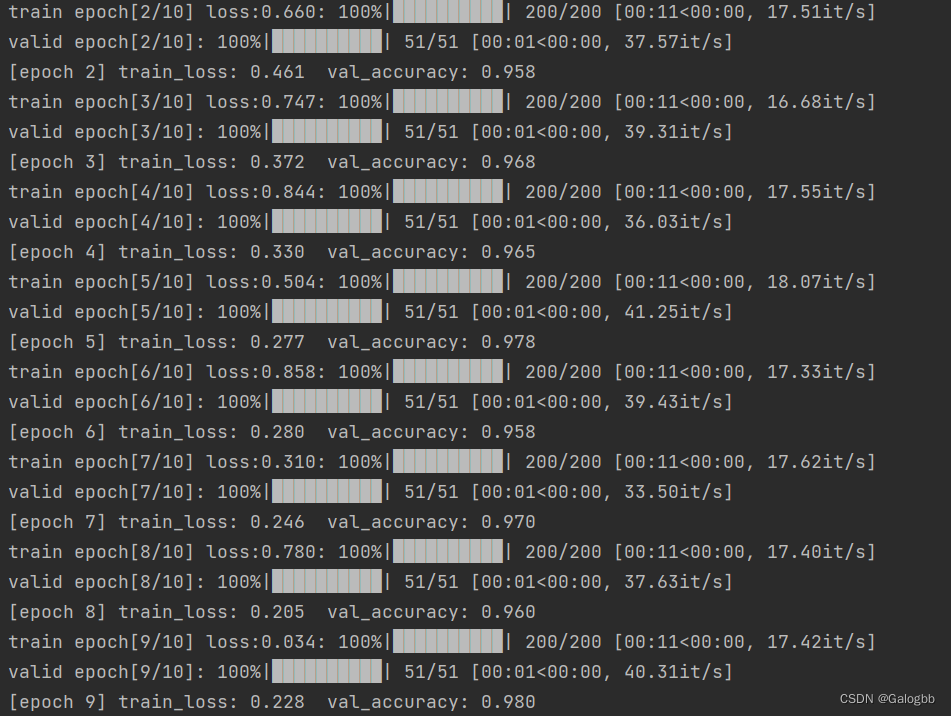
以下为部分的训练数据:
可看出在原来的权重上进行训练可以更快得到更高的准确率
训练得到的模型在未知的测试集中的400张照片可以达到100%的准确率
总结
以上就是今天要讲的内容,本文仅仅简单介绍了如何在灰度图中进行迁移学习,在此之前试过将灰度图转为RGB进行迁移学习,但是在验证集的准确率一直稳定在50%,分析了之后,原因是灰度图转为RGB时,颜色是不可控的,然而图像的颜色也是图像进行分类的依据之一,因此只能用改模型的方法进行迁移学习。
参考
ResNet训练单通道图像分类网络(Pytorch)_望~的博客-CSDN博客_resnet train.py
(55条消息) ResNet50修改网络适应灰度图片并加载预训练模型_吕大娟的博客-CSDN博客_resnet50修改
不当之处请多多指教

















 3050
3050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









