







 该文介绍了Dijkstra算法在路径规划中的应用,通过初始化开放集和封闭集,不断迭代更新找到从初始点到目标点的最短路径。在每次迭代中,选取当前开放集中成本最低的节点,检查其是否为目标节点,然后扩展搜索网格并更新相邻节点的成本。当找到目标节点时,算法结束。
该文介绍了Dijkstra算法在路径规划中的应用,通过初始化开放集和封闭集,不断迭代更新找到从初始点到目标点的最短路径。在每次迭代中,选取当前开放集中成本最低的节点,检查其是否为目标节点,然后扩展搜索网格并更新相邻节点的成本。当找到目标节点时,算法结束。
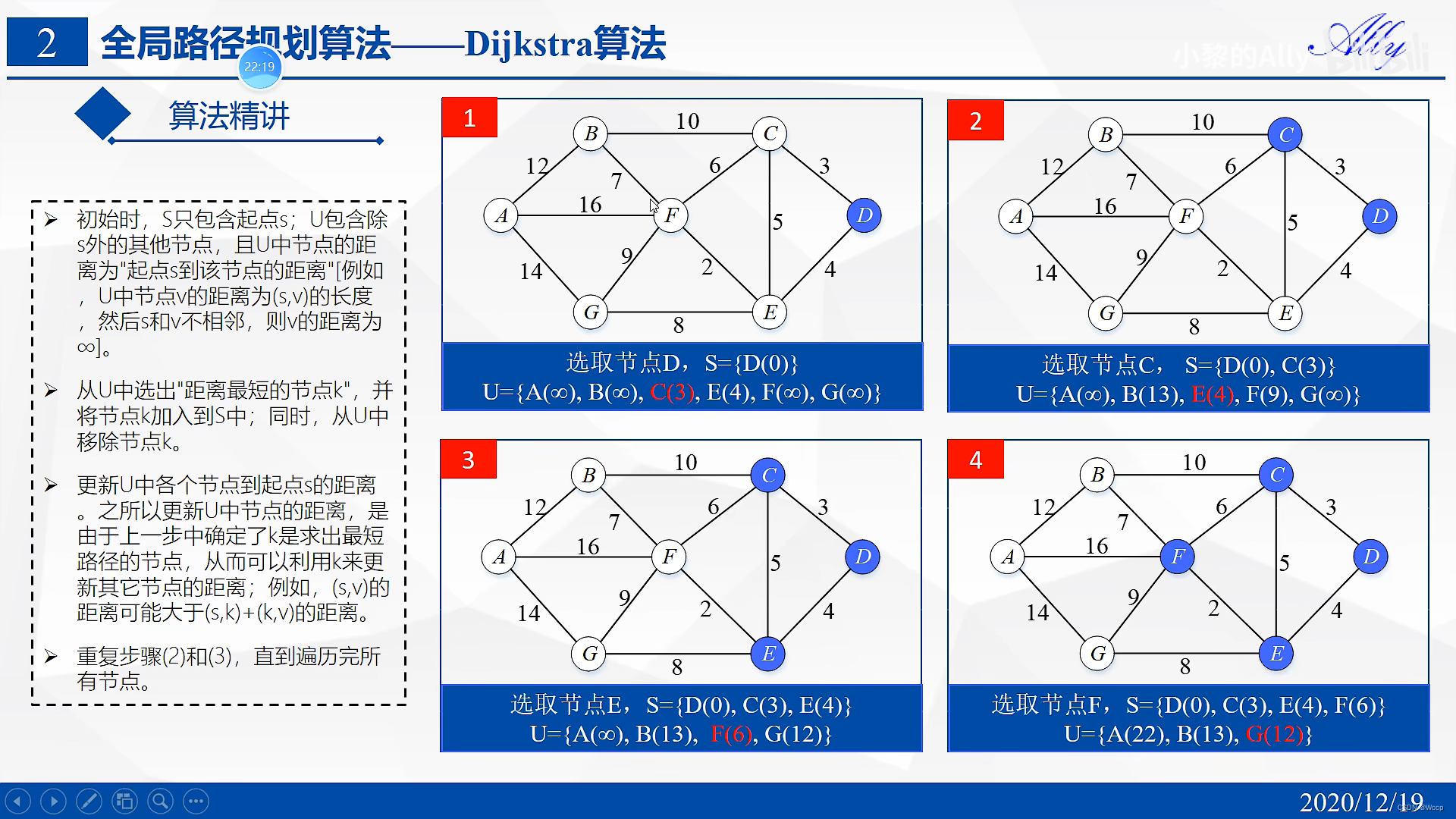
图像来自 路径规划与轨迹跟踪系列算法学习_第1讲_Dijkstra算法_哔哩哔哩_bilibili
dijkstra算法可以求从初始点到其余点的最短路径,分为两个数组,一个数组S记录最优路径点,另一个数组U记录各个节点到初始点的距离,通过迭代跟新S,U,直到S中满节点就可以得到最路径。
关键代码
while True:
open_set, closed_set = dict(), dict() #分别是U和S
open_set[self.calc_index(start_node)] = start_node
c_id = min(open_set, key=lambda o: open_set[o].cost)
current = open_set[c_id]
if current.x == goal_node.x and current.y == goal_node.y:#是否到达目标
print("Find goal")
goal_node.parent_index = current.parent_index
goal_node.cost = current.cost
break
# Remove the item from the open set
del open_set[c_id]
# Add it to the closed set
closed_set[c_id] = current #加入代价最小的点
# expand search grid based on motion model
for move_x, move_y, move_cost in self.motion: #方向寻找
node = self.Node(current.x + move_x,
current.y + move_y,
current.cost + move_cost, c_id)
n_id = self.calc_index(node)
if n_id in closed_set: #已经在S集中,代表着已经是最优的
continue
if not self.verify_node(node): #超出地图外
continue
if n_id not in open_set:
open_set[n_id] = node # Discover a new node
else:
if open_set[n_id].cost >= node.cost:
# This path is the best until now. record it!
open_set[n_id] = node

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









