







目录

STM32 USART 简介
- STM32的USART通用同步异步收发器是一个串行通信设备,可以灵活的与外部设备进行全双工数据交换。
- 有别于USART,还有一个UART,它在USART基础上裁减掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是UART。
- 串口通信一般是以帧格式传输数据,即一帧一帧传输,每帧包含有起始信号、数据信息、停止信息,可能还有校验信息。
- USART满足外部设备对工业标准NRZ异步串行数据格式的要求,并且使用了小数波特率发生器,可以提供多种波特率,使得它的应用更加广泛。
- USART支持同步单向通信和半双工发单线通信;还支持同步单向通信和半双工单线通信;还支持局域互连网络LIN、智能卡(SmartCard)协议与 IrDA(红外线数据协会) SIR ENDEC规范。
- USART支持使用DMA,可实现高速数据通信。

TXD和RXD交叉相连,两边共地!

STM32F103ZET6有三个串口
串口12345都挂载在APB2总线上
标准库
环境
- 硬件:STM32F103C8T6最小系统板
- 软件:Keil5 MDK
程序编写
本次使用USART1 PA9 + PA10
GPIOA和串口1都挂载在APB2总线,开启时钟要注意不要开错了,串口属于复用功能,要开启复用时钟
TXD和RXD一个是输出一个是输入,要分别配置PA9是TXD,输出端口,配置复用推挽输出!配置输出速率10MHz即可
PA10是RXD,输入端口,模式配置上拉输入或浮空输入,不需要配置输出速率
串口配置
设置一个形参,传入波特率
1位停止位,8位数据位,不使用奇偶校验,不使用硬件流控制,模式配置:发送和接收
NVIC配置
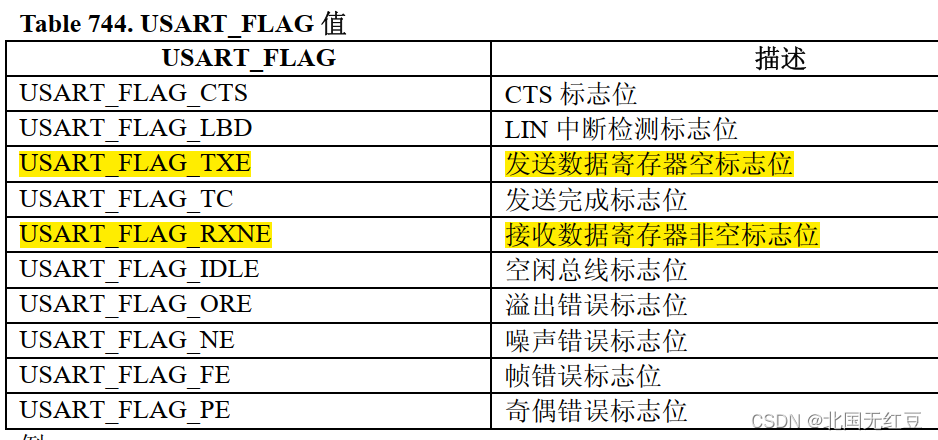
USART_FLAG_TXE 发送数据寄存器空标志位
USART_IT_RXNE 接收数据寄存器非空标志位
串口1初始化函数,形参是波特率
//BaudRate = 9600 115200
void USART1_Init(uint32_t BaudRate)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //GPIOA在APB2总线上
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //串口1在APB2总线上
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //串口属于复用功能,要开启复用时钟
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//PA9 TXD配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //配置复用推挽输出!
GPIO_InitStructure.GPIO_Pin = TXD; //output
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(USART_PORT, &GPIO_InitStructure);
//PA10 RXD配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //上拉输入 或 浮空输入 都行
GPIO_InitStructure.GPIO_Pin = RXD; //input
//不需要输出速率
GPIO_Init(USART_PORT, &GPIO_InitStructure);
USART_DeInit(USART1);//先初始化一下
USART_InitStructure.USART_BaudRate = BaudRate;//波特率设置 由形参传入
USART_InitStructure.USART_StopBits = USART_StopBits_1;//停止位 1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//数据位 8位
USART_InitStructure.USART_Parity = USART_Parity_No;//校验位 不使用奇偶校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使用硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //模式配置:发送和接收
USART_Init(USART1, &USART_InitStructure);
USART_ClearFlag(USART1, USART_FLAG_TXE);//开启中断之前,要先清空一下中断标志位
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//接收数据
USART_Cmd(USART1, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); //中断优先级分组
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //中断入口
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //只有一个中断,这两个还是随便写,没有冲突
NVIC_Init(&NVIC_InitStructure);
}串口1的中断服务函数
void USART1_IRQHandler (void)
{
//判断中断是否进入 (只要不等于0,就说明产生中断事件了)
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET )
{
USART_SendData(USART1, USART_ReceiveData(USART1));//发送数据,发送串口1接收的数据
//清除中断事件
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
//如果==0,就一直在这循环等待,直到等于1才跳出循环,这个标志位是1的时候,代表发送完成了
//while ( USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);//USART_FLAG_TC标志位 运行不稳定
while ( USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
}串口2、串口3配置也是一样的
然后插上开发板,打开串口调试助手,打开串口,打开串口,打开串口,打开串口,打开串口,打开串口,打开串口,打开串口,打开串口,打开串口,诶嘿,打不开呢~_~
没接USB转TTL当然检测不到串口了!!!
没接USB转TTL当然检测不到串口了!!!
没接USB转TTL当然检测不到串口了!!!
硬件接线
参考江科大自化协up主的接线图

USB转串口的RXD接(ZET6)单片机的TXD(PA9),TXD接单片机的RXD(PA10)
单片机和USB转TTL模块共地连接,单片机上电,USB转串口也上电
然后就可以打开串口了!
串口配置,根据上述代码勾选,接收区以ASCII码模式接收
在下边的框里输入要发送给单片机的数据,勾选发送新行、自动发送
效果图如下:

实际波形
再用逻辑分析仪抓取一下波形
逻辑分析仪也连接单片机的TXD --- PA9 发送引脚
PA9就一个引脚
这里我用一根杜邦线引出来PA9接到下面这种板子上嘛,逻辑分析仪就可以接到PA9上了(做小车共用VCC和GND的板子~)

我连接的是通道7,然后在USBee软件里双击通道7,弹出下面的窗口,串口波形具体配置如下:

RXD不需要看波形,暂时不接线,不设置
单击Save,可以看到通道7波形变成这样了

抓取2s波形(500ms定时发送),大概能看4个波形

挑选一个波形,放大看看

后两个[D][A]是换行
去掉自动换行再抓取一次波形

这样也能看到波形对应电平状态,电平状态是根据波特率和周期计算的
学习视频链接:
HAL库
环境
- 硬件:STM32F103C8T6最小系统板
- 软件:Keil5 MDK
- 软件:STM32CubeMX
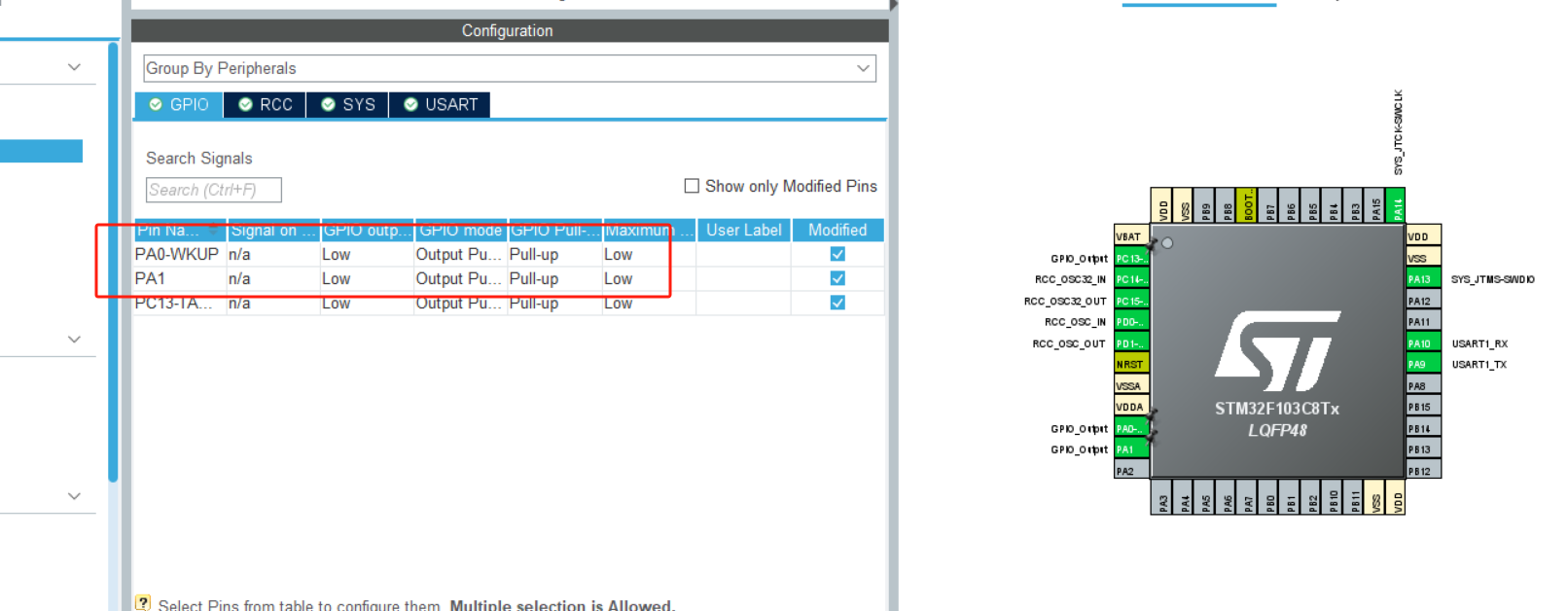
CubeMX配置
USART1
异步通信(Asynchronous)
波特率为115200 Bits/s,传输数据长度为8 Bit,奇偶检验无,停止位1。以及下面未显示出的 接收和发送都使能

使能NVIC!!!

另外配置了两个LED当做指示灯 ---PA0,PA1
HAL库中串口发送接收的重要函数
汇总:
HAL_UART_Transmit():串口发送数据,使用超时管理机制
HAL_UART_Receive(): 串口接收数据,使用超时管理机制
HAL_UART_Transmit_IT():串口中断模式发送
HAL_UART_Receive_IT(): 串口中断模式接收
HAL_UART_Transmit_DMA():串口DMA模式发送
HAL_UART_Transmit_DMA():串口DMA模式接收
阻塞式发送函数(初学者,推荐使用)
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, const uint8_t *pData, uint16_t Size, uint32_t Timeout)
非阻塞式发送函数
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, const uint8_t *pData, uint16_t Size);
发送完毕中断回调函数
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
串口发送函数的应用

阻塞式接收函数
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
非阻塞式接收函数(推荐使用)
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
接收完毕中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
回调函数实例
// 回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1) // 如果是USART1
{
if (RX_Data == 0xA1) // 如果接收到0xA1
{
LED1_PA0_ON(); // 打开LED1
LED2_PA1_ON();
HAL_UART_Transmit(&huart1, TX_Str2, sizeof(TX_Str2), 10000); // 阻塞性发送
LED2_PA1_OFF();
HAL_UART_Receive_IT(&huart1, &RX_Data, 1); // 接收一个字节之后,继续用中断的接收下一个字节
}
else if (RX_Data == 0xA2) // 如果接收到0xA2
{
LED1_PA0_OFF(); // 关闭LED1
LED2_PA1_ON();
HAL_UART_Transmit(&huart1, TX_Str3, sizeof(TX_Str3), 10000); // 阻塞性发送
LED2_PA1_OFF();
HAL_UART_Receive_IT(&huart1, &RX_Data, 1); // 接收一个字节之后,继续用中断的接收下一个字节
}
HAL_UART_Receive_IT(&huart1, &RX_Data, 1); // 写在if判断里面不好用,写在最后面
}
}实训:串口通信,控制LED灯的开关
说明
LED1---PA0 LED2---PA1
串口1使用PA9-PA10引脚,参考上述接线
- 上电后,单片机向串口1发送 "Hello World!"
- 串口1接收到"0xA1",打开LED1,发送"LED1 Open"
- 串口1接收到"0xA2",关闭LED1,发送"LED1 Close"
- LED2当做指示灯,单片机串口1发送前,点亮LED2,发送完毕关闭LED2
Code
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
#define LED1_PA0_ON() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET); // PA0 = 1
#define LED1_PA0_OFF() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET); // PA0 = 0
#define LED2_PA1_ON() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET); // PA1 = 1
#define LED2_PA1_OFF() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET); // PA1 = 0
uint8_t TX_Str1[] = "Hello World!\r\n"; // 自定义的发送数组
uint8_t TX_Str2[] = "LED1 Open\r\n";
uint8_t TX_Str3[] = "LED1 Close\r\n";
uint8_t RX_Data = 0;
// 回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1) // 如果是USART1
{
if (RX_Data == 0xA1) // 如果接收到0xA1
{
LED1_PA0_ON(); // 打开LED1
LED2_PA1_ON();
HAL_UART_Transmit(&huart1, TX_Str2, sizeof(TX_Str2), 10000); // 阻塞性发送
LED2_PA1_OFF();
HAL_UART_Receive_IT(&huart1, &RX_Data, 1); // 接收一个字节之后,继续用中断的接收下一个字节
}
else if (RX_Data == 0xA2) // 如果接收到0xA2
{
LED1_PA0_OFF(); // 关闭LED1
LED2_PA1_ON();
HAL_UART_Transmit(&huart1, TX_Str3, sizeof(TX_Str3), 10000); // 阻塞性发送
LED2_PA1_OFF();
HAL_UART_Receive_IT(&huart1, &RX_Data, 1); // 接收一个字节之后,继续用中断的接收下一个字节
}
HAL_UART_Receive_IT(&huart1, &RX_Data, 1); // 写在if判断里面不好用,写在最后面
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
// 发送Hello World!
LED1_PA0_ON();
HAL_UART_Transmit(&huart1, TX_Str1, sizeof(TX_Str1), 10000); // 阻塞性发送
LED1_PA0_OFF();
HAL_UART_Receive_IT(&huart1, &RX_Data, 1); // 用中断的接收,接收一个字节
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
效果展示


学习视频:
【【小蜜蜂笔记】基于STM32CubeMX的嵌入式开发基础教程】 https://www.bilibili.com/video/BV1m7411H7oT/?p=6&share_source=copy_web&vd_source=8af85e60c2df9af1f0fd23935753a933















 1645
1645











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











