







查找表
同一类型的数据元素(或记录)构成的集合
关键字:用来标识一个数据元素(或记录)的某个数据项的值
查找表分类:
- 线性表
- 树表
- 哈希表
静态和动态:
- 静态查找表:仅作查询,检索操作的查找表
- 动态查找表:作插入和删除操作的查找表
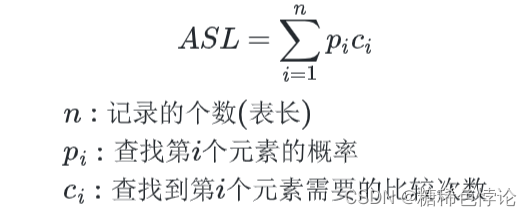
平均查找长度:关键字的平均比较次数
线性表
顺序查找
顺序表或线性表表示的静态查找表,表内元素无序
在顺序表S中查找值为key的数据元素,从最后一个元素开始比较
改进:把待查关键字key存入表头S[0]作哨兵
当S.length较大时,此方法可以使一次查找所需的平均时间几乎减少一半
顺序查找表的定义
#define MAXSIZE 100
typedef int KeyType;
typedef int InfoType;
struct Keytype
{
KeyType key; //关键字域
InfoType otherinfo; //其他域
};
struct SSTable //顺序表结构类型定义
{
Keytype* R; //顺序表地址指针(包括关键字域和其他域)
int length; //定义顺序表长度
};
顺序查找算法
int SqSearch(SSTable& S, const KeyType e)
{
//第一步:施加哨兵
S.R[0].key = e;
//第二步:顺序比较查找
int i;
for (i = S.length; S.R[i].key != e; --i)
{
; //空操作
}
return i;
//时间复杂度O(n)、空间复杂度O(1),ASL=(n+1)/2
}
优缺点
优点:算法简单,逻辑次序无要求,且不同存储结构均适用
缺点:ASL太长,时间效率太低
如何提高查找效率
- 按查找概率高低存储
- 查找概率高,比较次数少
- 查找概率低,比较次数多
- 当查找概率无法确定时
- 按查找概率动态调整
- 在每个key中增设一个访问频度域
- 始终保持频度域按非递增,有序的次序排列
- 每次查找后,讲刚查到的key数据移至表头
折半查找
集合中的元素按递增的顺序排列
每次将待查记录所在区间缩小一半
mid=(low+high)/2
key<mid, high=mid-1
key>mid, low=mid+1
若key==mid, 查找成功
若high<low, 查找失败
折半查找算法(非递归)
设表长为n,low,high和mid分别指向待查元素所在区间的上界,下界和中点,key为给定的要查找的值
初始时,令low=1,high=n,
mid=(low+high)/2
int Search(SSTable& S, const KeyType e)
{
int low = 1, high = S.length; //设置表头和表尾指针
while (low<=high) //low>high,循环结束
{
int mid = (low + high) / 2;
if (e == S.R[mid].key)
return mid; //e的位置就等于中间位置
if (e < S.R[mid].key)
high = mid - 1; //e的值位于小半部分,high指针前移
if (e > S.R[mid].key)
low = mid + 1; //e的值位于大半部分,low指针后移
}
return -1; //查找失败,返回-1
}
折半查找算法(递归)
int Search_(SSTable& S, const KeyType e,int low,int high)
{
if (low > high) //递归的终止条件
return -1;
int mid = (low + high) / 2;
if (e == S.R[mid].key)
return mid;
if (e < S.R[mid].key)
return Search_(S, e, low, mid - 1);
else
return Search_(S, e, mid+1, high);
}
优缺点
优点:效率比顺序查找高
缺点:只适用于有序表,且仅限于顺序存储结构,对线性链表无效
分块查找
也称索引顺序查找,将表分为几块,且表或者有序,或者分块有序
查找过程:先确定待查元素所在块(顺序查找或折半查找),再在块内进行顺序查找
数据类型定义
#define MAXBLOCK 18 //设置表长为18,0下标不存放元素,从1开始到18,每6个分一块,线性表分为3块
typedef int Keytype;
//每一个索引表的位置包括数据域,起始位置域,终止位置域
struct Elemtype
{
Keytype key;
int start, end;
};
//索引表结构类型定义
struct IndexTbale {
Elemtype *index;
int length;
};
//索引表的初始化
bool InitList(IndexTbale &T)
{
T.index = new Elemtype[MAXBLOCK]; //在堆区开辟内存 使用new定义
if (!T.index) { //没有表头,说明索引表不存在
cout << "error" << endl;
return false;
}
T.length = 0; //索引表初始长度
return true;
}
分块查找算法
int Blocksearch(IndexTbale& T, Keytype *a, Keytype e) //a是输入的元素数据表,e是要查找的值
{
int left = 1;
int right = T.length; //right指向索引表的末端
while (left <= right) {
int mid = (left + right) / 2; //先把索引表对半分?进行二分查找?
if (e <=T.index[mid].key) { //如果小于mid,则需要判断是否大于mid-1
if (e >T.index[mid - 1].key) { //如果大于mid-1 说明在mid所在块
//遍历查找元素在索引表所在块的起始位置到终止位置
for (int i = T.index[mid].start;i <= T.index[mid].end; i++) {
if (e == a[i])
return i; //进行顺序搜索
}
return 0; //在所在块找不到此元素,返回0
}
else { //查找元素小于等于mid-1 则需要进行下次的折半查找
right = mid - 1;
}
}
else { // 查找元素大于mid,进行下一次折半查找
left = mid + 1;
}
}
return 0; // while循环后依旧没有return,说明没有找到,返回0
}
测试案例
#include <iostream>
using namespace std;
int main()
{
IndexTbale T; //定义索引表T
InitList(T); //初始化索引表T
Creat(T); //创建数据表
Keytype a[19] = { 0, 22, 12, 13, 8, 9, 20, 33, 42, 44,
38, 24, 48, 60, 58, 74, 57, 86, 53 };
T.length = 3; //输入18个元素,每6个元素分为一块,索引表分为3块,长度为3
T.index[1].start = 1, T.index[1].end = 6, //索引表第一块从1开始,到6结束
T.index[1].key = 22; //每一块位置的数据域存储6个元素中的最大值
T.index[2].start = 7, T.index[2].end = 12,
T.index[2].key = 48;
T.index[3].start = 13, T.index[3].end = 18,
T.index[3].key = 86;
cout << "输入要查找的元素:" << endl;
int e;
cin >> e;
int x = Blocksearch(T, a, e);
cout << "该元素在第" << x << "个位置" << endl;
system("pause");
return 0;
}
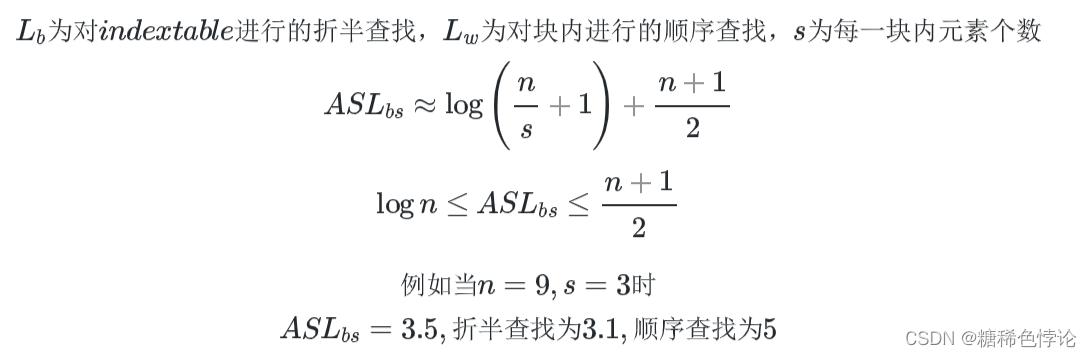
算法效率分析
优缺点
优点:插入和删除比较容易,无需进行大量移动
缺点:要增加一个索引表的储存空间并对初始索引进行排序运算
适用情况:如果线性表要快速查找且又经常动态变化,则可采用分块查找
线性表查找方法比较
| 顺序查找 | 折半查找 | 分块查找 | |
|---|---|---|---|
| ASL | 最大 | 最小 | 适中 |
| 结构 | 有序表,无序表可 | 仅有序表 | 分块有序 |
| 存储结构 | 循序表,链表都可 | 链表不可 | 顺序表,链表都可 |
树表
当表插入,删除操作频繁时,为维护表的有序性,需要移动表中很多记录,有一种方法就是改用动态查找表–树表
对于给定的key值,若表中存在则成功返回,若不存在则插入一个等于key值的记录
二叉排序树
二叉排序树或是空树,或是满足如下性质的二叉树:
- 若其左子树非空,则左子树上所有节点的值均小于根节点的值
- 若其右子树非空,则右子树上所有节点的值均大于等于根节点的值
- 其左右子树本身又是一颗二叉排序树
如果中序遍历非空二叉排序树,所得到的元素数据序列是一个递增的有序数列
数据类型定义
typedef int BSTKeytype;
typedef char* info;
typedef struct Elemtype
{
BSTKeytype key;
info other;
};
typedef struct Node //树中每一个结点包括数据域(key元素域和other其他域),左孩子和右孩子
{
Elemtype data;
Node* lchild, * rchild;
}*BSTree;
递归创建二叉树
void Creat(BSTree& T)
{
int input;
cin >> input;
if (input == 0)
T = NULL;
else {
T = new Node;
T->data.key = input;
Creat(T->lchild);
Creat(T->rchild);
}
}
二叉排序树的递归查找
- 若二叉排序树为空,查找失败,返回空指针
- 二叉排序树非空,将给定值key与根节点的关键字
T->data.key比较- 若key==T->data.key,查找成功,返回根节点地址
- 若key>T->data.key,进一步查找右子树
- 若key< T->data.key,进一步查找左子树
比较的关键字次数=此结点所在层次数
最多的比较次数=树的深度
BSTree& Search(BSTree& T, const BSTKeytype& e)
{
if (!T || T->data.key == e)
return T;
else if (e < T->data.key)
return Search(T->lchild, e);
else
return Search(T->rchild, e);
}
二叉排序树查找算法分析
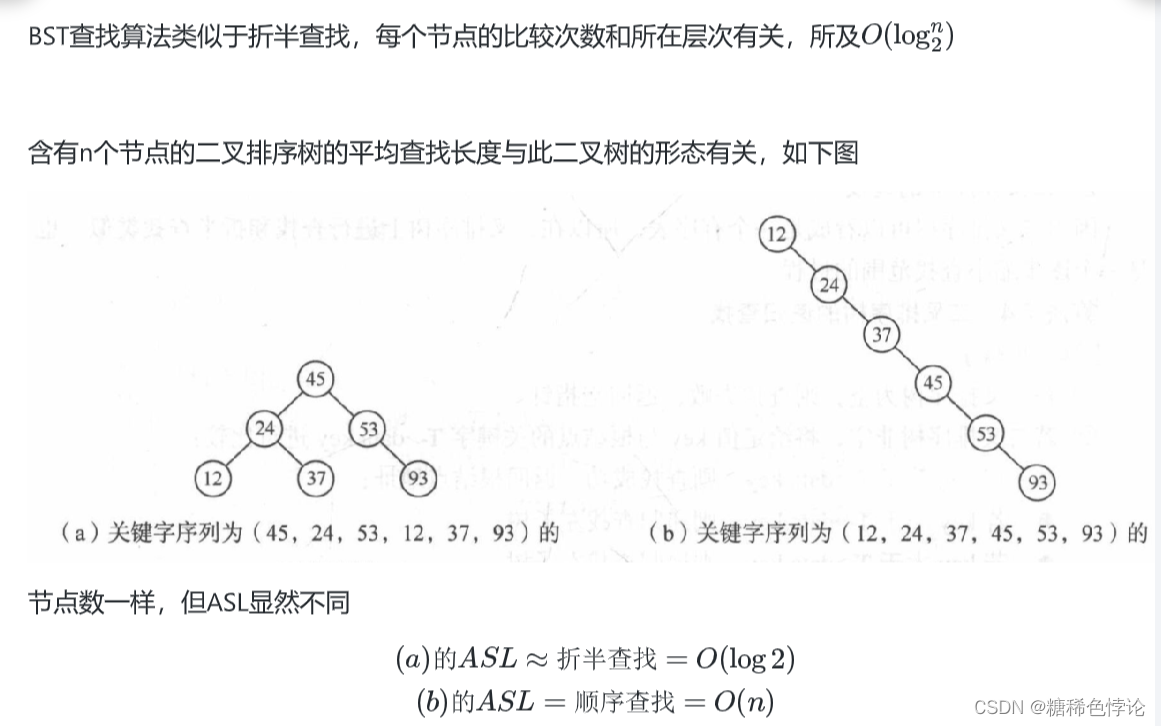
所以说在创建二叉排序树的时候,尽量要让此二叉树形状均匀
二叉排序树上插入操作
若树为空,则插入节点作为根节点插入到空树中
否则,继续在其左子树,右子树上查找(若树中已有,不再插入)
树中没有此元素,查找直至某个叶子节点的左子树或右子树为空为止,则插入节点应为该叶子节点的左孩子或右孩子
插入的元素一定在叶子节点上
void InsertBSTree(BSTree& T, BSTKeytype e)
{
if (T == NULL) {
T = new Node;
T->data.key = e;
T->lchild = T->rchild = NULL;
}
else if (e < T->data.key)
InsertBSTree(T->lchild, e);
else if (e > T->data.key)
InsertBSTree(T->rchild, e);
}
二叉排序树的创建
void CreatBSTree(BSTree& T)
{
cout << "为二叉排序树输入元素(以0为结束标志):" << endl;
T = NULL;
BSTKeytype key;
cin >> key;
while (key!=0)
{
InsertBSTree(T, key);
cin >> key;
}
}
二叉排序树上删除操作
删除该节点,并且保证删除后所得的二叉树仍满足二叉排序树的性质
将因删除节点而断开的二叉链表重新连接起来
防止重新连接后树的高度增加
- 被删除的节点是叶子节点:直接删除该节点,其双亲节点中相应指针域的值改为空
- 被删除的节点只有左子树或者只有右子树:用其左子树或右子树的节点替换
- 被删除的节点既有左子树,也有右子树:
- 以其中序前驱替换之,然后删除该前驱节点,前驱是左子树中最大的节点
- 用其后继替换之,然后再删除该后继节点,后继是右子树中最小的节点
若已知一个二叉排序树的节点m,m的直接前驱节点为m的左子树上右分支最后一个右孩
子为空的节点,如下图
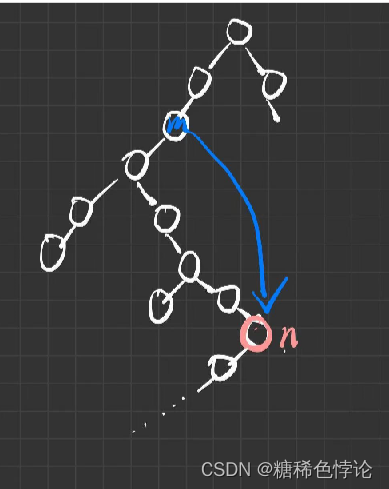
由图可知,n没有右孩子(如果n一旦有了有孩子,那么m的直接前驱必然会发生变化),但n可以有左孩子(即使有左孩子也并不影响n是m的直接前驱),同时也要考虑n的左子树没有右分支的情况
如果n没有右分支,那么m的直接前驱为n
利用对称性可知直接后继节点则为:m的右子树上左分支上最后一个左孩子为空的节点
void Delete(BSTree &T, BSTKeytype key)
{
BSTree p = T;
BSTree parent = NULL;
while (p) {
if (p->data.key == key)
break; //退出循环,此时p指向要删除的结点
else if (key < p->data.key) {
parent = p; //通过比较key值定位要删除节点
p = p->lchild;
}
else {
parent = p;
p = p->rchild;
}
}
if(!p){
cout << "树中没有此结点" << endl;
}
//当控制来到次行时,说明p指向了要删除的节点
BSTree pfree;
BSTree node;
if (p->lchild && p->rchild) {
BSTree prior = p->lchild;//p的直接前驱一定在p的左子树上
BSTree parentprior = p; //需要一个节点来定位prior的双亲结点
while (prior->rchild) {
parentprior = prior;
prior = prior->rchild;
}
p->data.key = prior->data.key;
if (parentprior != p)
{
parentprior->rchild = prior->lchild;
}
else {
parentprior->lchild = prior->lchild;
}
delete prior;
return;
}
else if (!p->lchild) {
pfree= p; // pfree用于存放 要删除节点的地址
node = p->rchild; // node存放需要链接节点的地址
}
else if (!p->rchild) {
pfree= p;
node = p->lchild;
}
//如果parent域仍然为空,说明要删除的节点为根节点
if (!parent) {
T = node;
}
else if (parent->lchild == p) {
parent->lchild = node;
}
else {
parent->rchild = node;
}
delete pfree;
}
平衡二叉树(AVL树)
一棵平衡二叉树或者空树,或者具有下列性质的二叉排序树:
平衡因子(BF)=节点左子树的高度-节点右子树的高度
左子树与右子树的高度之差的绝对值小于等于1
左子树与右子树也是平衡二叉排序树
对于一棵有n个节点的AVL树,其高度保持在O(log2^n)数量级
ASL也保持在O(log2^n)量级
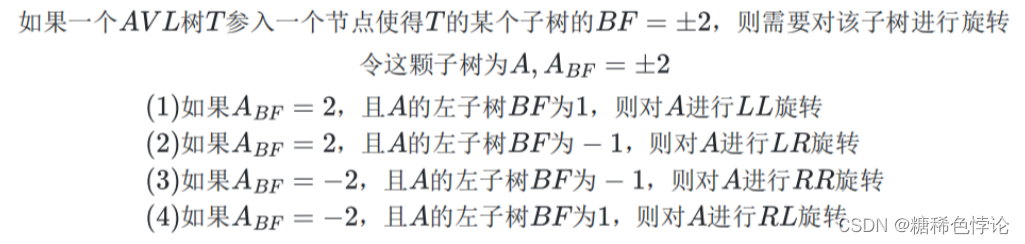
如果在一棵AVL树中插入一个新节点后造成失衡,则必须重新调整树的结构,使之恢复平衡
失衡二叉排序树平衡调整的四种类型
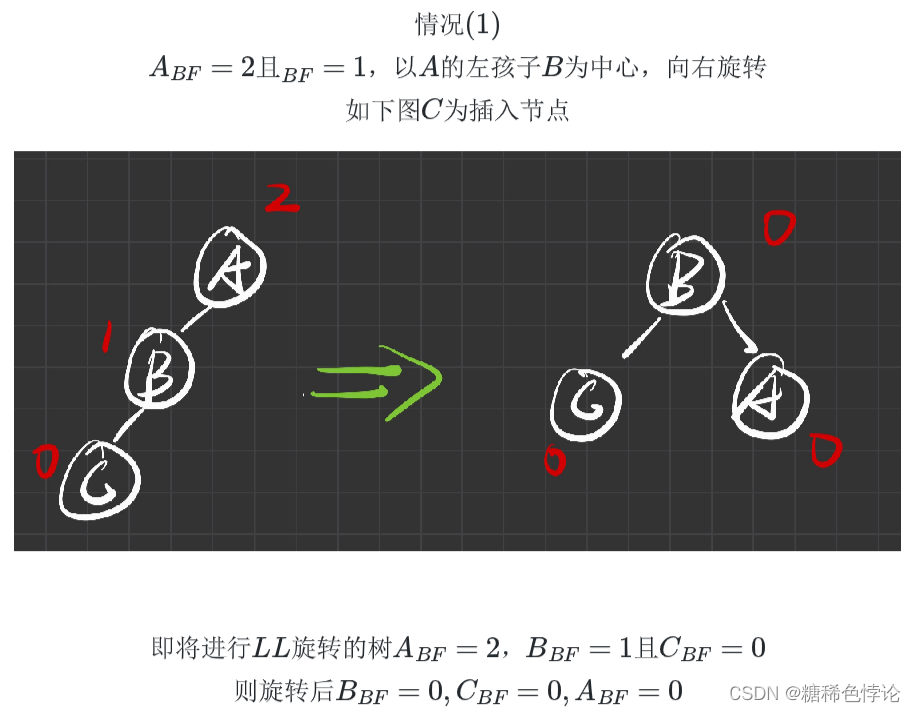
LL型旋转(右旋转)
2.


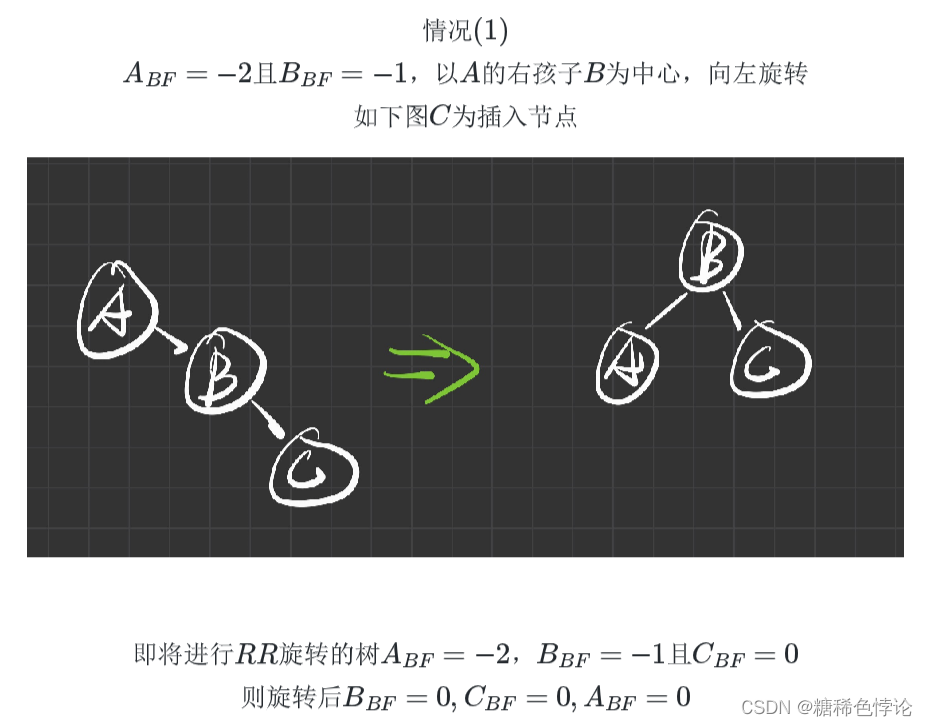
RR型旋转(左旋转)
2.


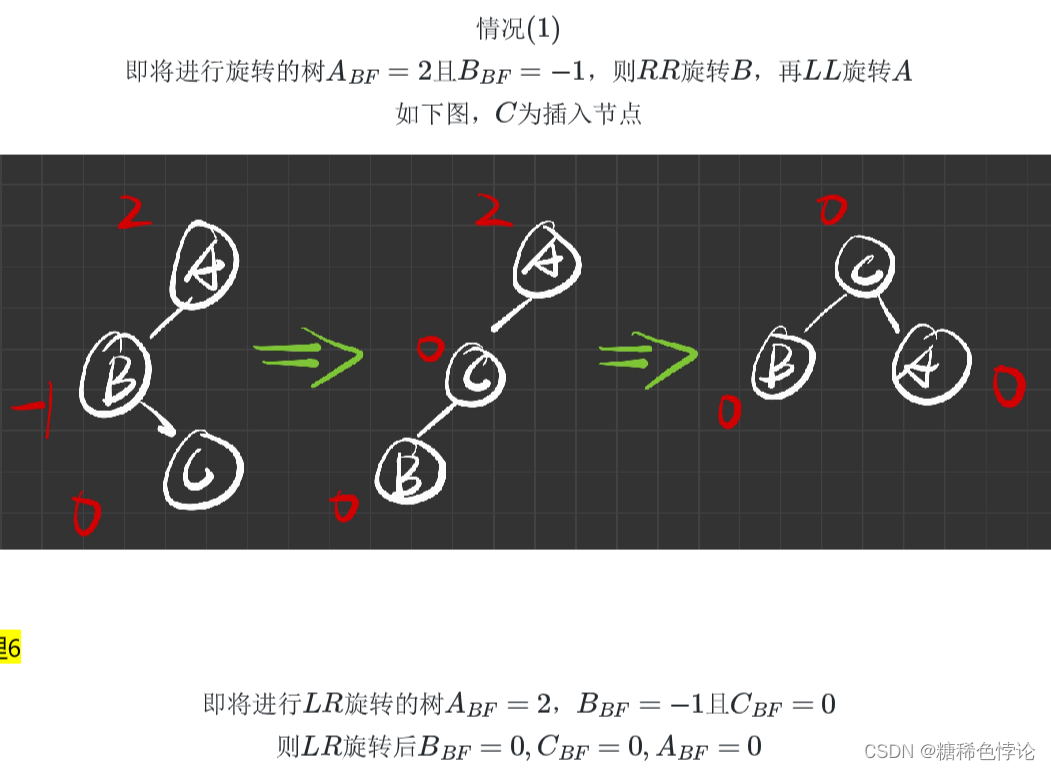
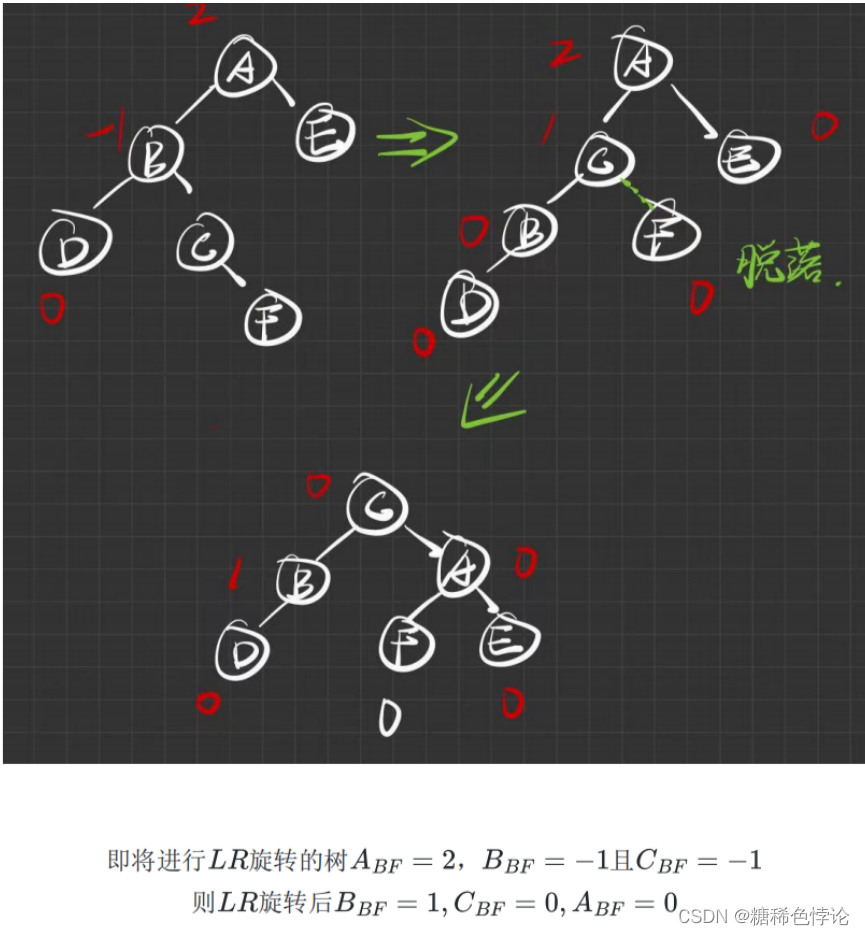
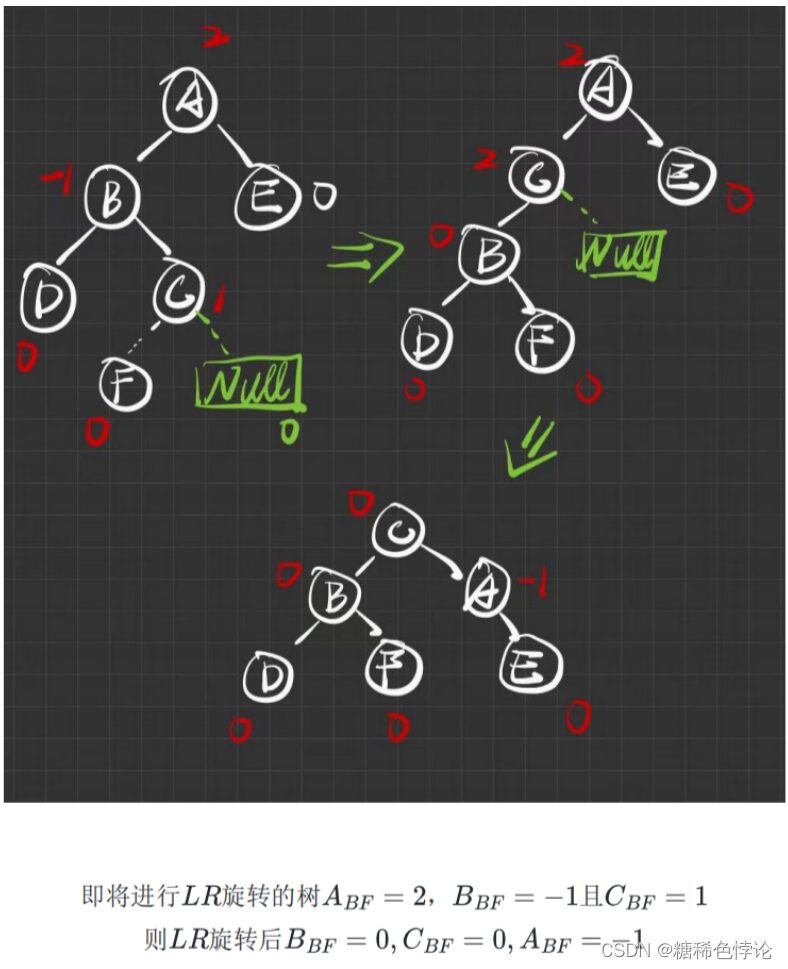
LR型旋转(左右旋转)
2.

3.

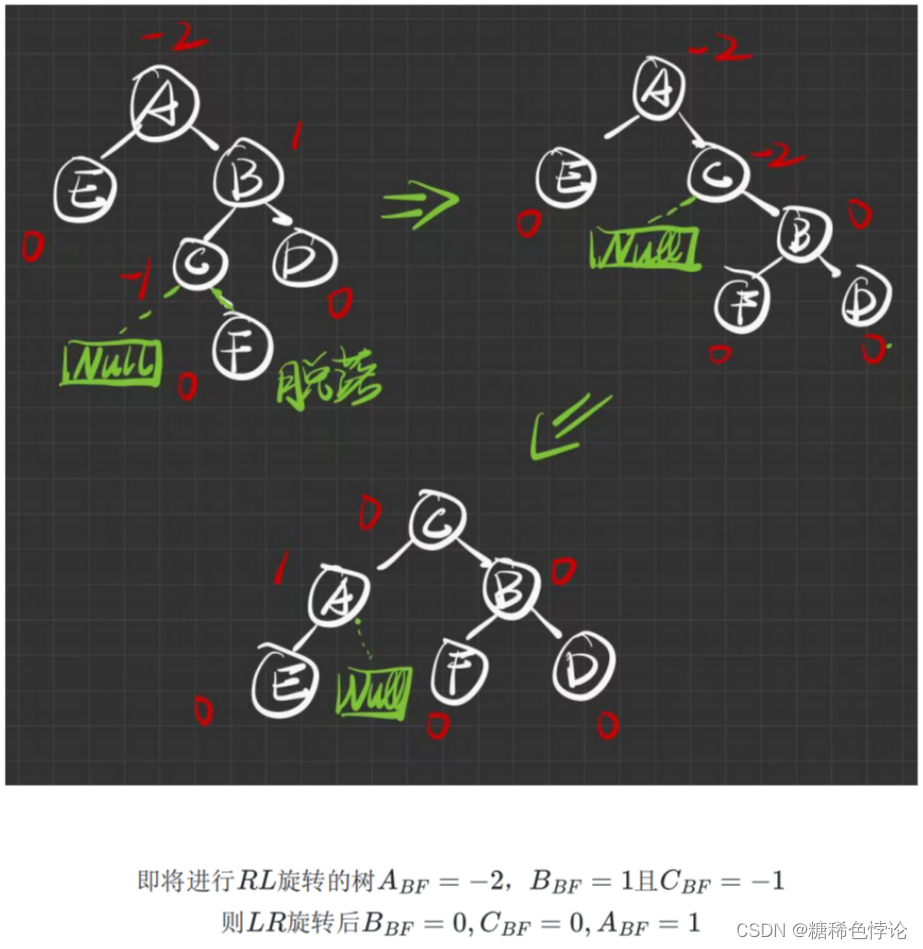
RL型旋转(右左旋转)
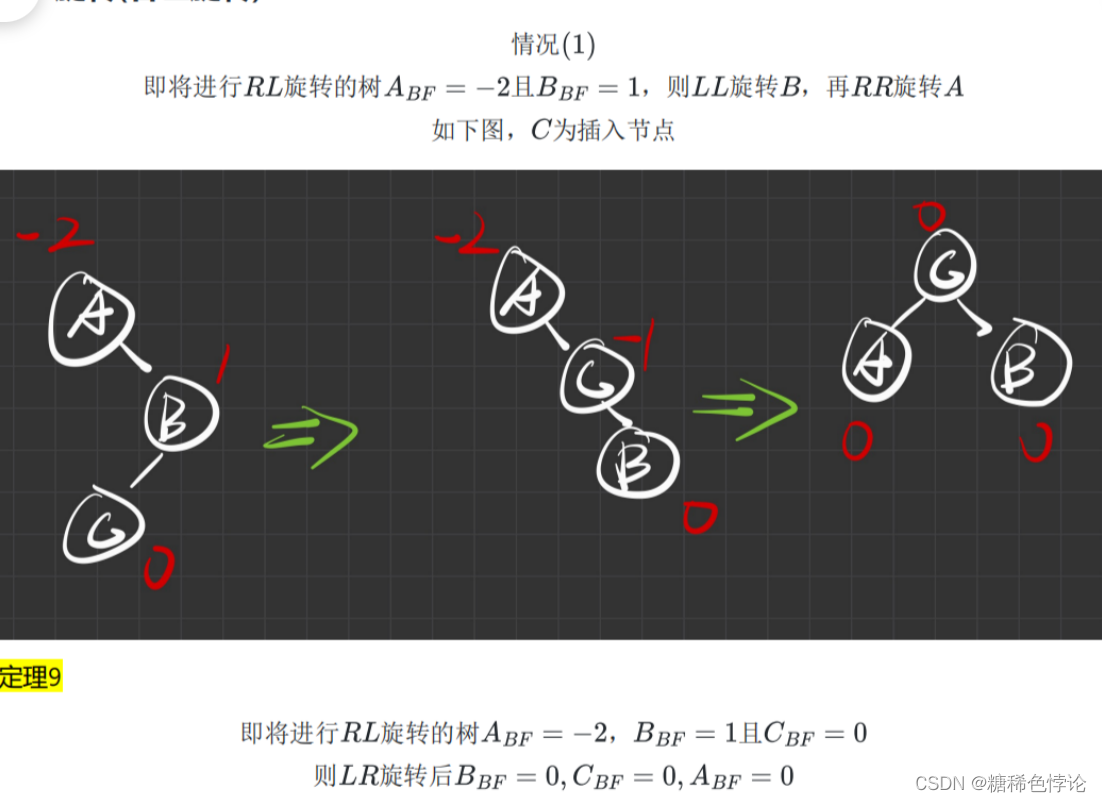
2.
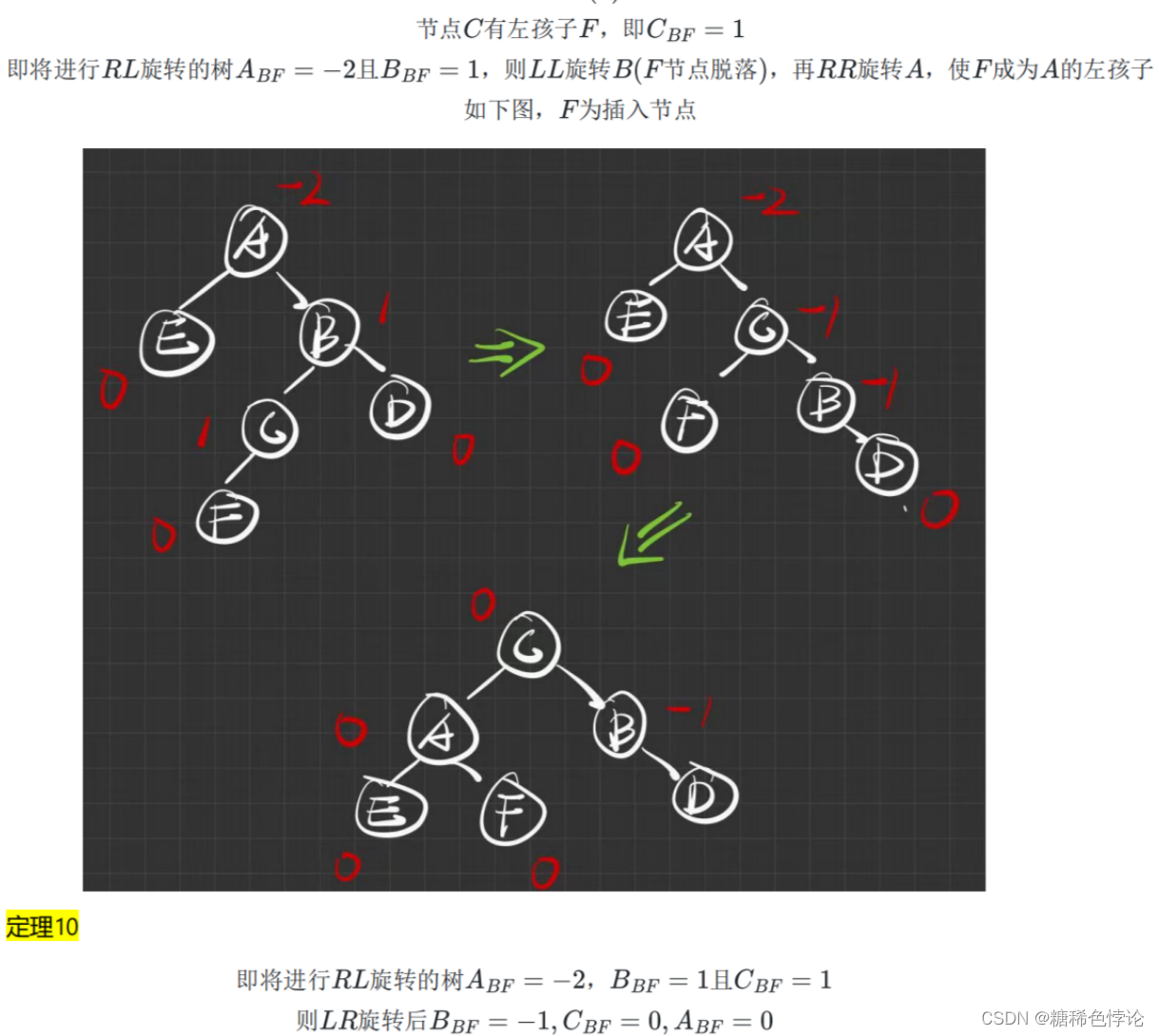
3.

总结
平衡二叉树代码
#define LH 1 //平衡因子1
#define EH 0 //平衡因子0
#define RH -1 //平衡因子-1
typedef int AVLElemtype;
typedef struct AVLNode
{
AVLElemtype key;
int bf; //平衡因子
AVLNode * lchild, *rchild;
}*AVLTree;
//左旋转树 代表着:以 的右孩子为中心,向左旋转
void LeftRotate(AVLTree& T)
{
AVLTree Rchild = T->rchild;
T->rchild = Rchild->lchild;
Rchild->lchild = T;
T = Rchild;
}
//右旋转树 代表着:以 的左孩子为中心,向右旋转
void RightRotate(AVLTree& T)
{
AVLTree Lchild = T->lchild;
T->lchild = Lchild->rchild;
Lchild->rchild = T;
T = Lchild;
}
//平衡二叉树大体上可以分成左平衡(LL,LR)和右平衡(RR,RL)
//左平衡
void LeftBalance(AVLTree& T) {
AVLTree L = T->lchild; // L->bf绝对不可能为EH(定理1)
AVLTree Lr;
// T的左孩子的右孩子
switch (L->bf) {
// LL 旋转
case LH:
//! 定理2
T->bf = L->bf = EH;
//! 此行的上下两行不可对调
RightRotate(T);
break;
case RH:
// LR旋转
Lr = L->rchild; //
switch (Lr->bf) {
case LH:
//定理8
T->bf = RH;
L->bf = EH;
break;
case EH:
//定理6
T->bf = L->bf = EH;
break;
case RH:
//定理7
T->bf = EH;
L->bf = LH;
break;
}
//根据定理6,7,8可知,旋转后Lr的BF必定为0
Lr->bf = EH;
LeftRotate(T->lchild);
RightRotate(T);
break;
}
}
//右平衡
// 和左平衡同理
void RightBalance(AVLTree& T) {
AVLTree R = T->rchild;
AVLTree Rl;
switch (R->bf) {
case RH:
T->bf = R->bf = EH;
LeftRotate(T);
break;
case LH: {
Rl = R->lchild; //
switch (Rl->bf) {
case LH:
T->bf = EH;
R->bf = RH;
break;
case EH:
T->bf = R->bf = EH;
break;
case RH:
T->bf = LH;
R->bf = EH;
break;
}
Rl->bf = EH;
RightRotate(T->rchild);
LeftRotate(T);
}
}
}
//插入结点和及时平衡
//! 全局变量taller记录高度是否发生变化,如果未发生变化为false,发生则true
bool taller = false;
void Insert_AVL(AVLTree& T, AVLElemtype key, bool& taller)
{
// T为要插入节点的双亲节点,key为要插入数据的值
//若T为空,则创建一个节点,并初始化
if (T == NULL)
{
T = new AVLNode;
T->lchild = T->rchild = NULL;
T->key = key;
T->bf = EH;
taller = true;
}
else if (key < T->key) {
//如果插入值小于T的key值,则递归T的左子树,直到找到一个NULL节点
Insert_AVL(T->lchild, key, taller);
//判断树是否变高了
if (taller) {
//以T为根插入节点,则T的bf发生变化
switch (T->bf) {
case LH:
// T的bf == -1,向T的左孩子插入节点则T的bf = 2,需要左平衡
LeftBalance(T);
taller = false;
//经过平衡后taller = false,因为T经过左调整后,变得平衡了
break;
case EH:
// 如果T的bf == 0,向T的左孩子插入节点,则T的bf = 1
T->bf = LH;
//此时T的高度发生变化
taller = true;
break;
case RH:
// 如果T的bf == -1,向T的左孩子插入节点,则T的bf = 0
T->bf = EH;
//高度未发生变化
taller = false;
break;
}
}
}
else{
//和上面同理
Insert_AVL(T->rchild, key, taller);
if (taller) {
switch (T->bf) {
case LH:
T->bf = EH;
taller = false;
break;
case EH:
T->bf = RH;
taller = true;
break;
case RH:
RightBalance(T);
taller = false;
break;
}
}
}
}
创建平衡二叉树
void CreatAVL(AVLTree& T)
{
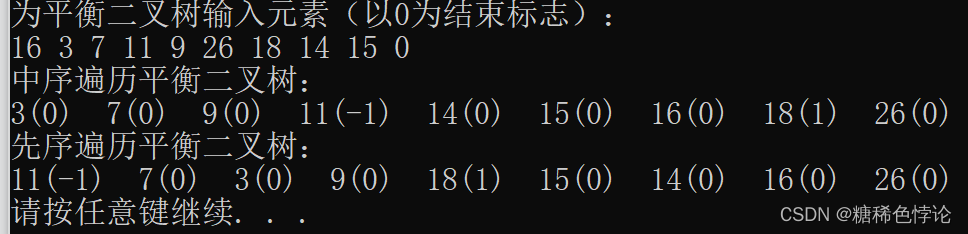
cout << endl << "为平衡二叉树输入元素(以0为结束标志):" << endl;
T = NULL;
AVLElemtype key;
cin >> key;
while (key != 0)
{
Insert_AVL(T, key, taller);
cin >> key;
}
}
//中序遍历
void LDR_(AVLTree& T)
{
if (T == NULL)
return;
else {
LDR_(T->lchild);
cout << T->key << "(" << T->bf << ")" << " ";
LDR_(T->rchild);
}
}
测试代码
#include <iostream>
using namespace std;
int main(void)
{
AVLTree T;
CreatAVL(T);
cout << "中序遍历平衡二叉树:" << endl;
LDR_(T);
cout<< endl<< "先序遍历平衡二叉树:" << endl;
DLR_(T);
cout << endl;
system("pause");
return 0;
}
output:
哈希表
记录的存储位置与关键字直接存在对应关系
Loc(i)=Hash(keyi)
散列方法:选取某个函数,依该函数按关键字计算元素的存储位置,并按此存放,查找时,由同一个函数对给定值k计算地址,与地址单元中元素关键码相比较
冲突:通过Hash函数,不同的关键字映射到同一个地址上(不可避免,只能尽量减少)
优点:查找效率高
缺点:空间效率低
构造hash函数考虑的因素
- 执行速度(计算时间)
- 关键字长度
- Hash Table的大小
- 关键字的分布情况
- 查找频率
hash函数的构造方法
直接定址法
Hash[key]=a·key+b(a,b为常数)
优点:以关键字key的某个线性函数值为散列地址,不会发生冲突
缺点:要占用连续地址空间,空间效率低
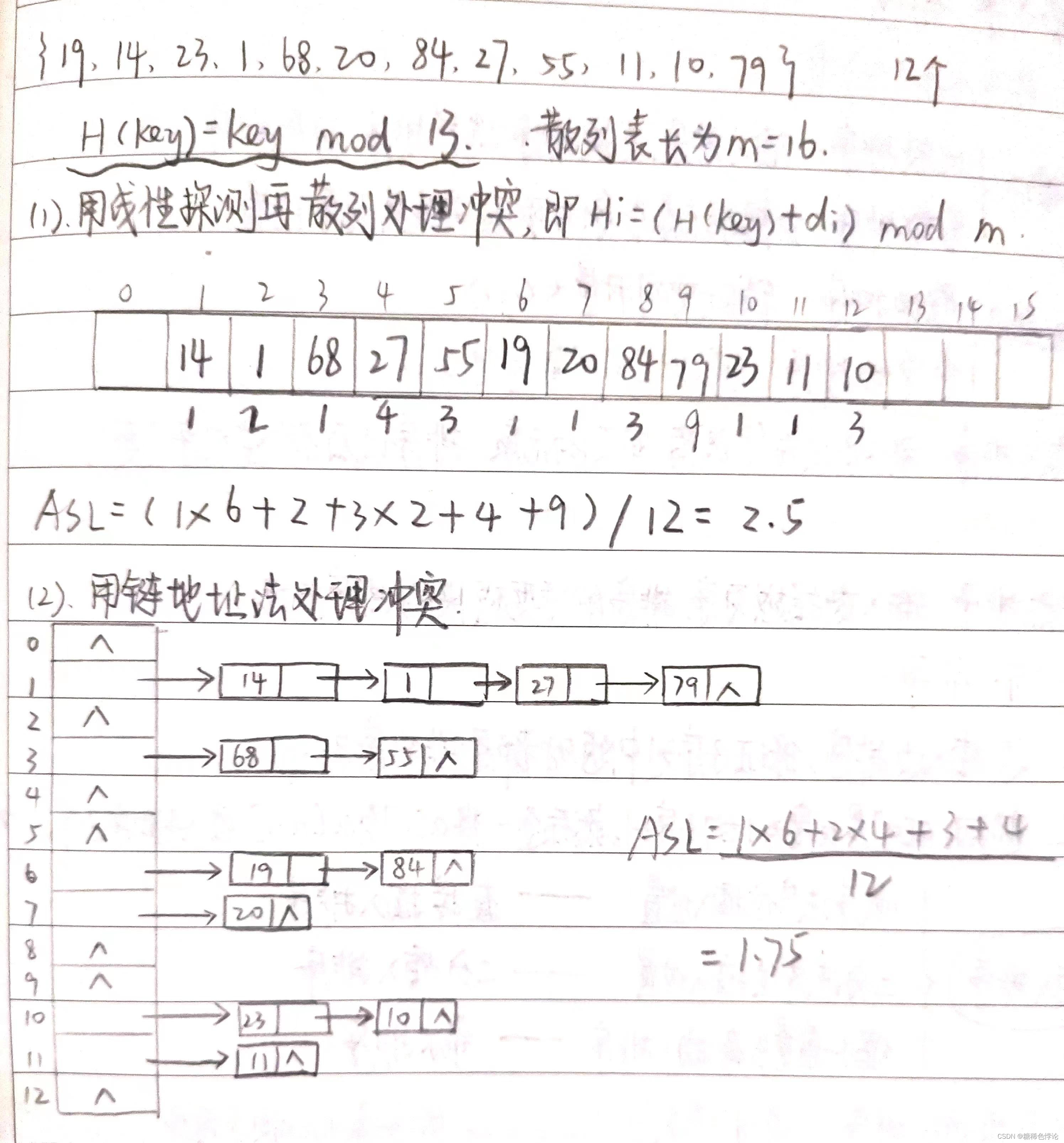
除留余数法
Hash[key]=key mod p(p是一个整数)
设表长为m,取p≤m且p为质数
完整代码
#include <iostream>
#include "stdio.h"
#include "stdlib.h"
using namespace std;
#define HASHSIZE 12 // 定义散列表长度
#define NULLKEY 0
//定义哈希表
typedef struct HashTable
{
int *elem; // 数据元素存储地址,动态分配数组
int count; // 当前数据元素个数
}HashTable;
int m = 0;
//初始化哈希表
int Init(HashTable* H)
{
int i;
m = HASHSIZE;
H->elem = (int*)malloc(m * sizeof(int)); //分配内存
H->count = m;
for (i = 1; i <= m; i++)
{
H->elem[i] = NULLKEY; //将哈希表的元素初始化为0
}
return 1;
}
//除留余数法
int Hash(int k)
{
return k % (m+1);
}
//在哈希表中插入元素
void Insert(HashTable* H, int k)
{
int addr = Hash(k);
while (H->elem[addr] != NULLKEY)
{
addr = (addr + 1) % (m+1);//开放定址法
}
H->elem[addr] = k;
}
//在哈希表中查找元素
int Search(HashTable* H, int k)
{
int addr = Hash(k); //求哈希地址
while (H->elem[addr] != k)//开放定址法解决冲突
{
addr = (addr + 1) % (m+1);
if (H->elem[addr] == NULLKEY || addr == Hash(k))
return -1;
}
return addr;
}
//散列表元素显示
void Result(HashTable* H)
{
int i;
for (i = 1; i <= H->count; i++)
{
cout << H->elem[i] << " ";
}
cout << endl;
}
void main()
{
int i, j, addr;
HashTable H;
int arr[HASHSIZE] = { NULL };
Init(&H);
cout << "输入关键字集合:("<<HASHSIZE<<"个)" << endl;
for (i = 0; i < HASHSIZE; i++)
{
cin >> arr[i];
Insert(&H, arr[i]);
}
cout << "存入哈希表中为:" << endl;
Result(&H);
cout << "输入要查找的元素:" << endl;
cin >> j;
addr = Search(&H, j);
if (addr == -1)
cout << "元素不存在!" << endl;
else
cout << j << "元素在表中的位置是:" << addr <<endl;
system("pause");
return;
}
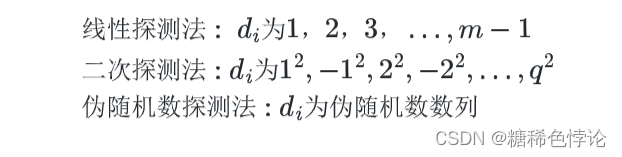
开放地址法
有冲突时就去寻找下一个空的散列地址,只要表足够大,总能找到空的地址,并将元素存入
除留余数法:Hi=(Hash(key)+di)mod m
di为增量序列
链地址法
相同散列地址的记录链成一单链表,m个散列地址就设m个单链表,然后用一个数组将m个单链表的表头指针存储起来,形成一个动态的结构
优点:非同义词不会冲突,链表上空间动态申请,更适用于表长不确定的情况
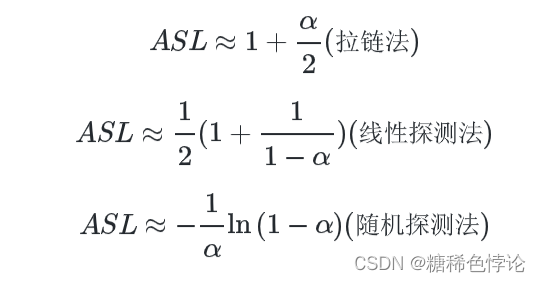
查找效率分析
ASL取决于:散列函数、处理冲突的方法、散列表的装填因子

所以Hash表的查找效率既不是O(1),也不是O(n)
小结论
- 链地址法优于开地址法
- 除留余数法作散列函数优于其他类型函数
查找总结
顺序查找,折半查找,分块查找比较
| 顺序查找 | 折半查找 | 分块查找 | |
|---|---|---|---|
| 时间复杂度 | O(n) | O(log^n) | 与确定所在块的查找方法有关 |
| 特点 | 算法简单,对结构无要求,效率底 | 对表结构有要求,效率高 | 对结构有一定要求,效率介于顺序查找和折半查找之间 |
| 适用情况 | 任何结构的线性表,不经常做插入和删除 | 有序的顺序表,不经常做插入和删除 | 块间有序,块内无序的循序表,经常做插入和删除 |
折半查找和二叉排序树比较
| 折半查找 | 二叉排序树 | |
|---|---|---|
| 时间复杂度 | O(log^n) | O(log^n) |
| 特点 | 有序的顺序表,插入和删除需要移动大量元素 | 用二叉链表,插入和删除无需移动元素,只需修改指针 |
| 适用情况 | 不经常插入删除 | 经常插入和删除 |
哈希表:开地址法和链地址法比较
| 开地址法 | 链地址法 | |
|---|---|---|
| 空间 | 无指针域,存储效率高 | 附加指针域 |
| 时间复杂度 | 有二次聚集现象,查找效率低 | 无二次聚集现象,查找效率高 |
| 插入删除 | 不易实现 | 易于实现 |
| 适用情况 | 表的大小固定,适用于表长无变化 | 节点动态生成,适用于表长经常变化 |
图片来源:PDF整理笔记By: LI LIANGJI (Wechat:llj907015000)
本章完~















 222
222











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









