






STM32的GPIO介绍
GPIO简介
GPIO(General Purpose Input/Output,通用输入输出)是STM32单片机最基本、最常用的外设之一,用于与外部设备进行数字信号交互(如控制LED、读取按键、驱动传感器等)。STM32的GPIO具有高度灵活性,支持多种工作模式,并可通过复用功能连接片内外设(如USART、SPI等)。
1. GPIO 主要特性
(1)基本功能
数字输入:读取外部信号(如按键状态)。
数字输出:控制外部设备(如LED亮灭)。
复用功能(AF):将引脚分配给特定外设(如USART_TX、I2C_SCL等)。
模拟输入:部分GPIO可配置为ADC输入或DAC输出。
(2)关键特性
多种工作模式:
输入模式:浮空、上拉、下拉。
输出模式:推挽、开漏。
复用模式:用于外设功能(如SPI、I2C)。
模拟模式:用于ADC/DAC。
可配置速度:支持2MHz~50MHz(影响信号边沿速率)。
中断支持:可配置为上升沿/下降沿/双边沿触发中断。
5V容忍(部分型号):某些引脚可承受5V输入(需查数据手册确认)。
STM32 GPIO 工作模式详解与应用场景
GPIO(通用输入输出)是STM32最基础且灵活的外设,支持8种工作模式,分为输入模式和输出模式两大类。虽然STM32CubeMX能自动配置外设对应的GPIO模式,但理解这些模式的原理和适用场景对硬件设计、调试和优化至关重要。以下是每种模式的解析:
输入:
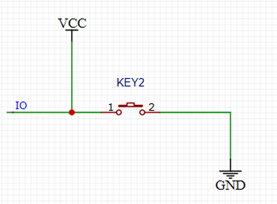
这里的IO口和VCC相连,如果按键不按下,IO口的输入就是VCC高电平,如果按键按下IO口就变成了GND低电平,这是一个GPIO输入最简单的例子
输出:
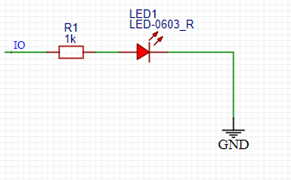
这里如果IO口输出高电平,就是1,LED灯就亮,如果输出低电平,就是0,LED灯就不亮
1. 输入模式
(1) 输入浮空模式(GPIO_MODE_INPUT_FLOATING)
原理:
输入通道仅通过TTL施密特触发器整形信号,无上拉/下拉电阻,引脚电平完全由外部电路决定。悬空时读取的电平状态不确定(可能受噪声干扰)。
特点:
高阻抗输入,功耗低。
抗干扰能力弱,需外部电路保证稳定电平。
应用场景:
外部已自带上下拉的信号(如数字传感器输出)。
USART_RX、CAN等通信接口(依赖外部电路电平)。
(2) 输入上拉模式(GPIO_MODE_INPUT_PULLUP)
原理:
内部接入约40kΩ上拉电阻,悬空时默认高电平;外部拉低时电平为低。
特点:
避免悬空时的电平漂移。
适合检测低电平有效的信号(如按键接地)。
应用场景:
按键检测(按键一端接地,按下时拉低)。
下降沿/低电平触发的中断配置。
(3) 输入下拉模式(GPIO_MODE_INPUT_PULLDOWN)
原理:
内部接入约40kΩ下拉电阻,悬空时默认低电平;外部拉高时电平为高。
特点:
避免悬空时的干扰。
适合检测高电平有效的信号。
应用场景:
按键检测(按键一端接VCC,按下时拉高)。
上升沿/高电平触发的中断配置。
(4) 模拟输入模式(GPIO_MODE_ANALOG)
原理:
完全关闭数字电路(无施密特触发器、上下拉电阻),信号直接接入ADC/DAC等模拟外设。
特点:
无数字噪声干扰,可读取连续模拟电压。
功耗最低(关闭数字部分电路)。
应用场景:
ADC采样(如电位器、温度传感器)。
低功耗模式下禁用未使用的GPIO。
2. 输出模式
(5) 推挽输出(GPIO_MODE_OUTPUT_PP)
原理:
通过PMOS和NMOS组成推挽结构,可主动输出高电平(3.3V)或低电平(0V),驱动能力强。
特点:
高低电平驱动电流对称(典型20mA)。
输出阻抗低,抗干扰能力强。
应用场景:
驱动LED、继电器、蜂鸣器等。
高速信号(如SPI_CLK、PWM输出)。
(6) 开漏输出(GPIO_MODE_OUTPUT_OD)
原理:
仅NMOS可导通,输出低电平时拉低,输出高电平时为高阻态(需外接上拉电阻)。
特点:
- 支持“线与”逻辑(多设备共享总线)。
- 高电平由外部上拉电阻决定(可兼容5V设备)。
应用场景:
- I2C总线(SDA/SCL)。
- 电平转换(如3.3V与5V设备通信)。
3. 复用功能模式
(7) 复用推挽输出(GPIO_MODE_AF_PP)
原理:
引脚作为外设功能(如USART_TX、SPI_MOSI),输出特性与普通推挽相同。
应用场景:
外设需强驱动能力的场景:
USART_TX(确保信号完整性)。
PWM输出(驱动电机控制信号)。
(8) 复用开漏输出(GPIO_MODE_AF_OD)
原理:
引脚作为外设功能,输出特性与普通开漏相同。
应用场景:
外设需总线共享或电平转换的场景:
I2C(支持多主设备冲突检测)。
SMBus(兼容不同电压设备)。
4. 模式选择对比表
| 模式 | 电平特性 | 驱动能力 | 典型应用 |
| 输入浮空 | 由外部决定,悬空不稳定 | USART_RX、数字传感器 | |
| 输入上拉 | 默认高,外部可拉低 | 按键(接地触发) | |
| 输入下拉 | 默认低,外部可拉高 | 按键(接VCC触发) | |
| 模拟输入 | 直接接入ADC | 电位器、温度传感器 | |
| 推挽输出 | 强高低电平(0V/3.3V) | 强(20mA) | LED、PWM、SPI |
| 开漏输出 | 低电平强,高电平靠上拉 | 弱(需外接) | I2C、电平转换 |
| 复用推挽 | 同推挽,用于外设 | 强 | USART_TX、TIM_PWM |
| 复用开漏 | 同开漏,用于外设 | 弱 | I2C_SCL/SDA |
5.总结与图像结合
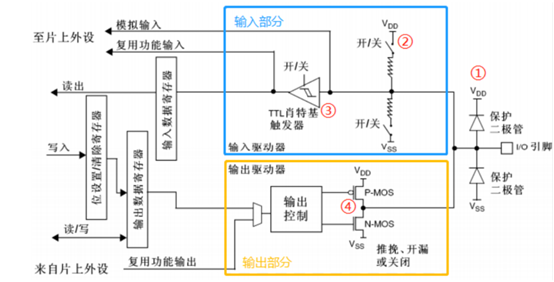
5.1浮空输入: 2号位上下拉电阻都断开即为浮空输入, 这时候引脚的电平状态是不确定的. 采集输入模拟信号时候会用到, 其他场景下我们应该避免使用浮空输入, 导致出现这种引脚电平不确定的状态. 除非有外部电路实现了上下拉, 为引脚提供了可确定的电平状态.
2.2上拉输入: 2号位上拉电阻连接, 此时输入方式称为上拉输入. 经常应用到需要检测GPIO引脚产生上升/下降沿时候用到.
2.3下拉输入: 2号位下拉电阻连接, 此时输入方式称为下拉输入. 经常应用到需要检测GPIO引脚产生上升/下降沿时候用到.
2.4模拟输入: 上下拉电阻断开,施密特触发器关闭,双 MOS 管也关闭。其他外设可以通过模拟通道输入输出。该模式下需要用到芯片内部的模拟电路单元单元,用于 ADC、DAC、MCO这类操作模拟信号的外设.
2.5开漏输出: P-MOS管处于截止状态, 此时输出状态仅由N-MOS控制. 当ODR输出0时经过反相器变成1, 此时N-MOS导通引脚通过N-MOS接地输出低电平. 当ODR输出1经过反相器变成0, 此时N-MOS处于高阻态, GPIO引脚状态不确定.实际应用的时候开漏输出需要外部上拉电子来输出高电平, 否则开漏模式只能输出低电平.
2.6推挽输出: 当ODR输出0时经过反相器变成1, 此时P-MOS截止, N-MOS导通, GPIO输出低电平. 当ODR输出1经过反相器变成0, 此时N-MOS截止, P-MOS导通GPIO输出高电平.
2.7开漏式复用输出: 跟开漏输出功能一样, 只不过芯片内部不是连接到ODR寄存器, 而是连接到其他外设.
2.8推挽式复用输出: 跟推挽输出功能一样, 只不过芯片内部不是连接到ODR寄存器, 而是连接到其他外设.
5. 关键注意事项
1. 电平兼容性:
- 开漏模式需外接上拉电阻(如I2C通常用4.7kΩ)。
- 3.3V GPIO直接驱动5V设备需谨慎(部分STM32引脚支持5V容忍)。
2. 抗干扰设计:
- 高速信号(如SPI)建议配置为推挽输出,缩短上升时间。
- 长线传输时串联22Ω电阻抑制振铃。
3. 低功耗优化:
- 未使用的GPIO设置为模拟模式以降低功耗。
- 避免浮空输入模式(可能增加漏电流)。
6. 实战建议
- **初学者**:从LED(推挽输出)和按键(上拉输入)入手,逐步尝试USART、I2C等外设。
- **调试技巧**:
- 用逻辑分析仪观察GPIO波形(如I2C信号是否正常)。
- 检查时钟是否使能(`__HAL_RCC_GPIOx_CLK_ENABLE()`)。
- **CubeMX配置**:
//(USART1_TX复用推挽)
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 复用推挽
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1; // 复用功能编号
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
```


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











