






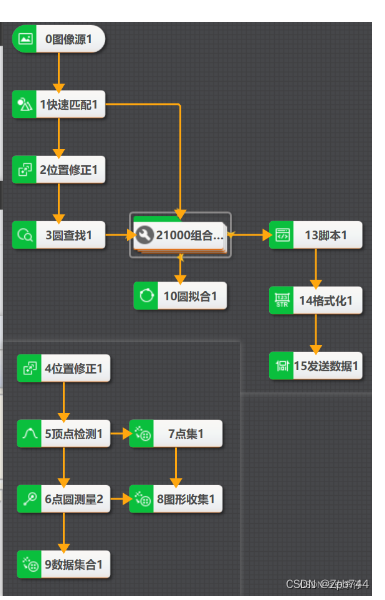
直觉上模型图:
1.首先就是图像源,这个很好理解,可以选择导入图片或者是连接动态的摄像头来进行获取图选源。接下来就是快速匹配,通过快速匹配自带的工具可以快速把你圈住的特征识别模型,且在整个ri范围内查找符合这个特征的个数等等,可以看它返回的参数。
2.再接下来就是位置修正,位置修正有什么用呢?假如我们识别的roi区域在是一个辅助定位、修正目标运动偏移、辅助精准定位的工具。可以根据模板匹配结果中的匹配点和匹配框角度建立位置偏移的基准,然后再根据特征匹配结果中的运行点和基准点的相对位置偏移实现ROI检测框的坐标旋转偏移,也就是让ROI区域能够跟上图像角度和像素的变化。讲大白话就是让roi区域可以随着给定的修正坐标对roi区域发生变化。
例如: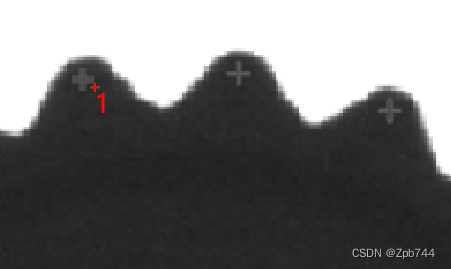 我选择要对一个齿轮的每个端点进行一个顶点查询。但是你这里有很多个齿轮,因此你必须使你的roi区域发生变化,把全部齿轮的端点都进行一次单独的roi覆盖。那么怎么实现呢?简单的位置修正是没有循环效果的!所以我们需要用到group来实现循环,循环的条件就是齿轮端点的个数;那么group会对group所有的操作都进行循环,无论你是在group里还是在group外使用里面的方法都会被循环到。我觉得不是很好。而快速匹配
我选择要对一个齿轮的每个端点进行一个顶点查询。但是你这里有很多个齿轮,因此你必须使你的roi区域发生变化,把全部齿轮的端点都进行一次单独的roi覆盖。那么怎么实现呢?简单的位置修正是没有循环效果的!所以我们需要用到group来实现循环,循环的条件就是齿轮端点的个数;那么group会对group所有的操作都进行循环,无论你是在group里还是在group外使用里面的方法都会被循环到。我觉得不是很好。而快速匹配 会返回很多参数,其中就有每个匹配中心的中心点的x,y坐标,并且这个是一个类似数组一样的。因为我们符合快速匹配的目标有很多的情况下,那么我们就会有很多中心点的x和y值。我们通过用group的方法,可以实现对每个匹配中心的遍历。因此我们的roi就可以通过这个中心点的遍历跟着一起改动。(见下方修正信息)
会返回很多参数,其中就有每个匹配中心的中心点的x,y坐标,并且这个是一个类似数组一样的。因为我们符合快速匹配的目标有很多的情况下,那么我们就会有很多中心点的x和y值。我们通过用group的方法,可以实现对每个匹配中心的遍历。因此我们的roi就可以通过这个中心点的遍历跟着一起改动。(见下方修正信息)

可以看见我的顶点检测的roi区域是非常小一块,同时我们需要变化我们的roi区域,因此通过位置修正的方法和group的循环实现对roi的不断切换。















 5715
5715











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









