






引言
小编毕业前就做过平衡小车项目开发,本期讲该项目分享给大家。由于创作时间有限把改项目分为三篇,上篇讲平衡小车的原理图,下篇讲平衡小车的PCB图,下面进行代码分析。会尽快抽时间发出。
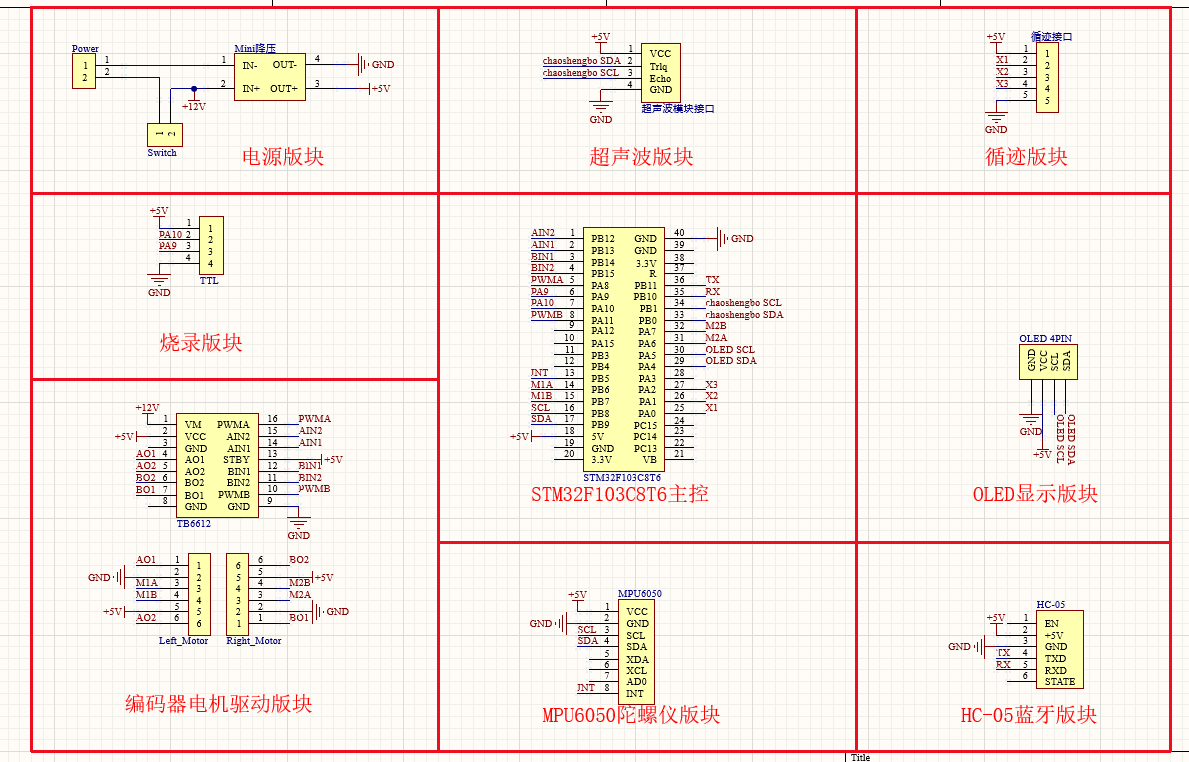
完整原理图
实物视频演示
平衡小车实物演示
项目介绍
该平衡小车使用STM32微控制器实现的一个平衡小车。系统通过MPU6050采集姿态数据并结合PID控制算法实现自足平衡,编码器电机提供速度反馈实现闭环控制 。同时该项目可实现蓝牙控制,超声波避障以及红外循迹。OLED讲陀螺仪姿态数据XY方向数据显示。该项目具备多种功能的实现小车平衡运动。
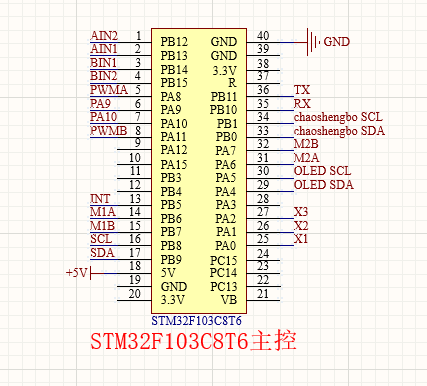
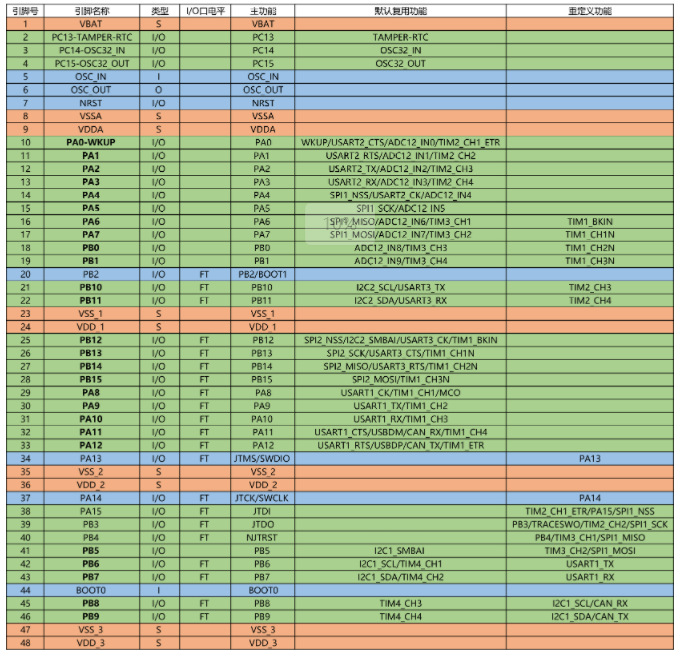
最小系统板模块
引脚功能的定位如下图,在做其他项目配置引脚时需要注意的是续结合任何模块的数据手册或引脚原理图来配置。
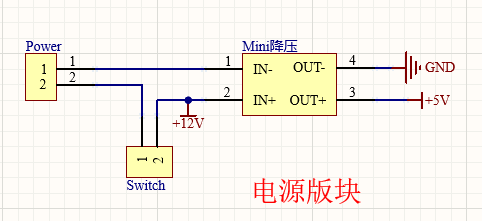
电源模块
电源模块使用降压模快或LM2596将12V转化为5V稳定供电于单片机,外接开关实现电源控制,该电压模块已集成保护电路效果,故不需要额外设置保护电路
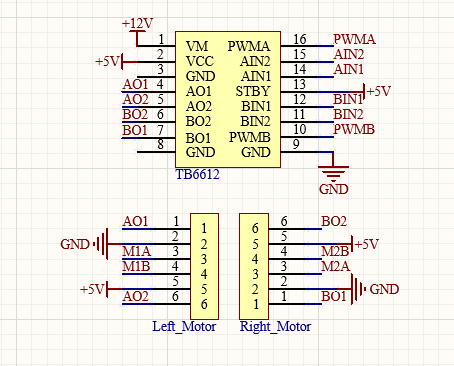
编码器电机驱动模块
使用TB6612芯片作为电机驱动模块,仅一块即可实现两个编码器电机的控制。电压以及引脚配置如原理图,STAY引脚拉高保持开启,left_Motor,Right_Motor为编码器电机接口。
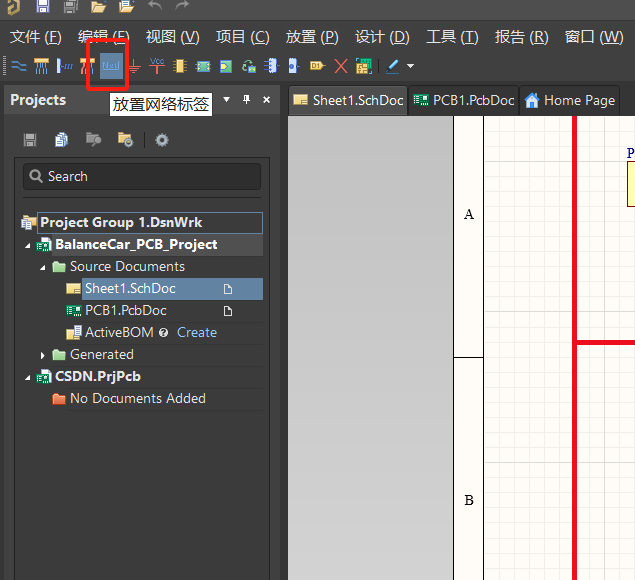
原理图引脚连接均使用网络标签形式连接,在AD中找到此功能
结束语
各模块原理图比较清晰,主要结合引脚原理图表实现引脚连接即可,其他功能模块在完整原理图跟着配置即可。需要完整资料(原理图、PCB、代码)可以扫该二维码领取。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









