






在一个导航系统中,地图的主要作用是给决策规划提供先验的环境数据,在一个复杂的导航系统中,地图分为多个层级,包括高精度点云图层、语义图层、可视化图层、其他形式图层等。
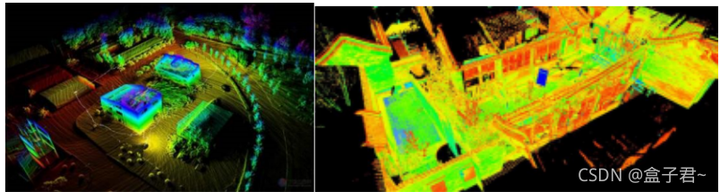
不同层级的地图存储并更新不同类型的数据,因此不同层级的地图往往使用不同的地图格式,包括特征点云地图、矢量地图、语义地图、二维占据地图、二维代价地图、三维八叉树地图、ESDF Map欧氏距离场地图等等。
总的来说,我们可以认为地图就是一个巨大的数据结构,不同的地图格式本质就是使用不同数据结构存储和更新环境信息。本文先介绍常用的地图格式,了解不同地图格式的特性和功能。针对不同的地图格式,地图的建立和更新方法在下面章节进行介绍。
建立地图专栏之一:地图的理解及地图的类型介绍_三种常用的地图类型-CSDN博客
机器人地图建立相关教程及博客请关注专栏:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









