






前言
报名了第十五届蓝桥杯嵌入式,练手作品,不足请理解
原题
LED模块
一、cubemax配置
根据原理图可得,PC8-PC15为LED灯,将其对应的引脚选择GPIO_output
注意:PD2为锁存器,在选择的时候也应该拉高
然后在gpio中,将gpio_output_level选择high(这一步的作用是将其默认拉高,防止在上电的时候被点亮)
 二、keil5代码编写
二、keil5代码编写
led.c
#include "led.h"
void LED_Disp(uchar dsLED)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,dsLED<<8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
led,h
#ifndef _LED_H_
#define _LED_H_
#include "main.h"
void LED_Disp(uchar dsLED);
#endif
LCD模块
cubemax不需要配置(蓝桥杯官方例程有配置文件)
代码同样不需要编写(有官方例程,可以直接移植使用)
注意:官方例程是有三个的
按键模块
在该题目中,按键仅需要单次点击即可
一、cubemax配置
观看原理图,将PA0、PB0、PB1、PB2选择GPIO_input
在gpio中,将四个引脚选择pull_up上拉
(上拉操作主要是为了消除浮动,在本次中,不进行上拉操作也是可以的,因为对应的引脚已经接上VDD)
 二、keil5代码编写
二、keil5代码编写
interrupt.c
#include "interrupt.h"
struct keys key[4]={0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//Öжϻص÷º¯Êý
{
if(htim->Instance==TIM3)//ÅжÏÊǶ¨Ê±Æ÷Èý½øÈëÖжϻص÷º¯Êý
{
key[0].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);//key[0].key_sta±íʾ·ÃÎÊÊý×ékeyÖеÄkey_sta³ÉÔ±
key[1].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].key_sta=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);//¶ÁÈ¡Ëĸö°´¼ü
for(int i=0;i<4;i++)
{
switch(key[i].judge_sta)//judge_staÊDZê־λ£¬Í¨¹ý¸ÃÓï¾ä£¬Ö´ÐжÔÓ¦µÄcaseÓï¾ä
{
case 0:
{
if(key[i].key_sta==0) key[i].judge_sta=1;
}
break;
case 1:
{
if(key[i].key_sta==0)
{
key[i].judge_sta=2;//µ±°´¼üÔٴΰ´Ï£¬Ö´ÐÐcase2
}
else
{
key[i].judge_sta=0;
}
}
break;
case 2:
{
if(key[1].key_sta==1)
{//°´¼üËÉ¿ª£¬ÇåÁ㣬ѻ·»Øµ½¿ªÊ¼
key[i].single_flag=1;
key[i].judge_sta=0;
}
}
break;
}
}
}
}
interrupt.h
#ifndef _INTRRUPT_H_
#define _INTRRUPT_H_
#include "main.h"
#include "stdbool.h"
struct keys
{
uchar judge_sta;
bool key_sta;
bool single_flag;
};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
#endif
定时器
选择TIM3定时器,再选择内部时钟
(在按键中,每相隔10ms进行一次扫描)
定时器的基本概念
分频系数(psc) 重装载值(counter)
定时器工作频率=外部总线频率/(psc+1)
定时频率=定时器工作频率/counter
(这个定时频率就是我们需要设置的值)
10ms=100hz
基本频率为80MHz
100Hz=80MHz/psc+1/counter
所以psc=80-1
counter=10000-1(注意减1)
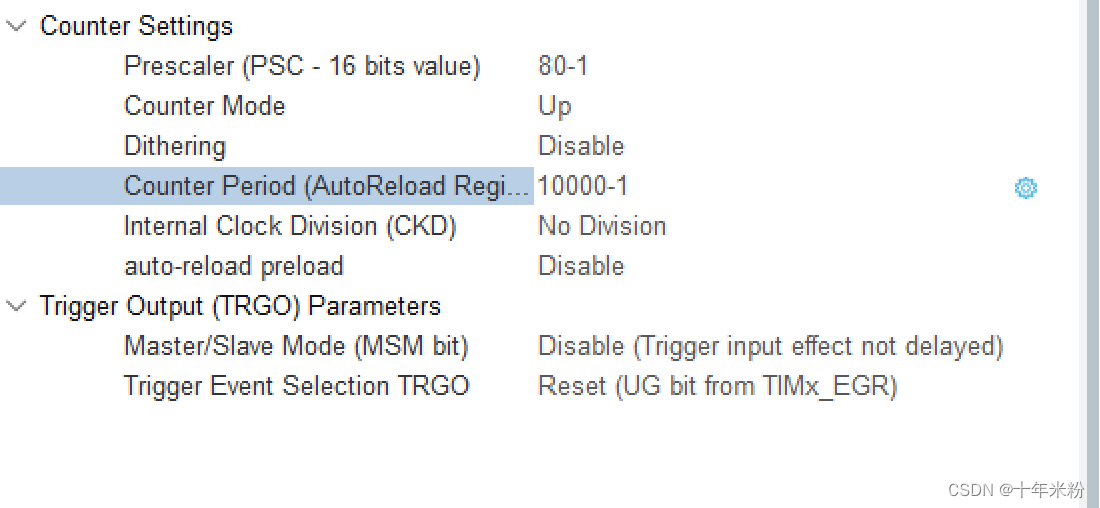
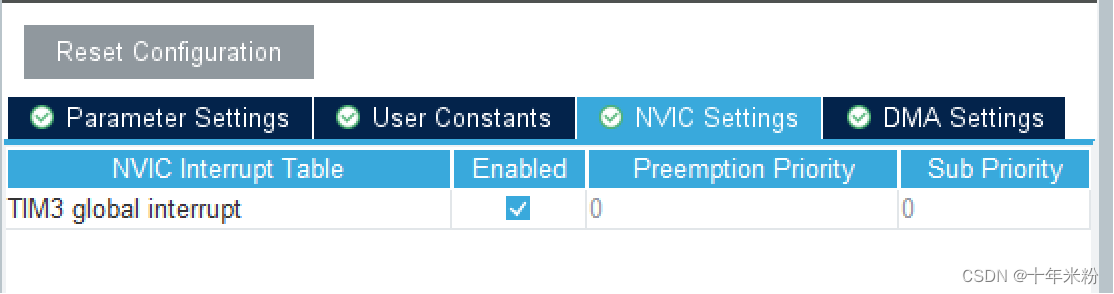
最后记得勾选上中断使能
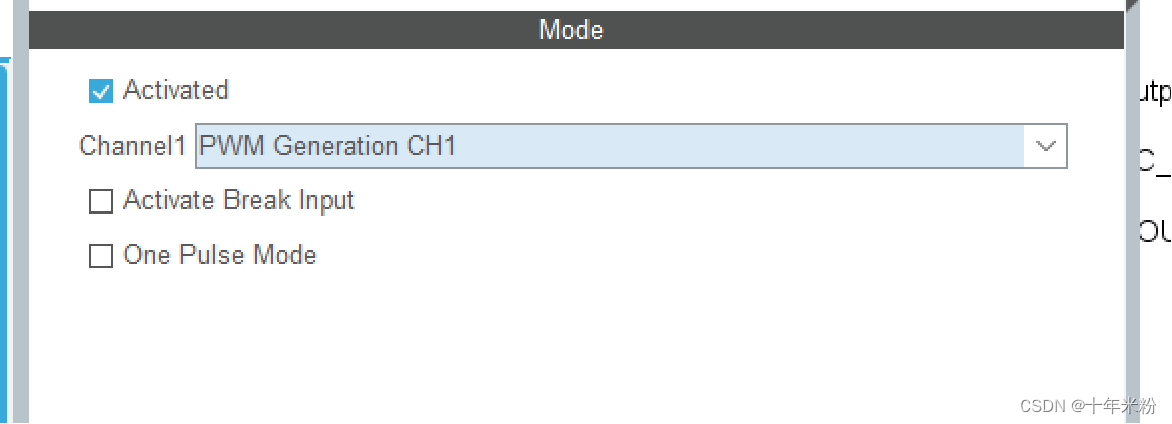
PWM输出模块
选择PA7的TIM17_CH1
在本题中PWM的输出要有两种即可,一是频率为2KHz、占空比为20%的脉冲信号,另一种是持续输出低电平,
将持续输出低电平是不是可以理解为输出频率2KHz、占空比为0%的脉冲信号
一、cubemax配置
首先将对应的定时器进行使能,再选择对应的通道的输出模式
题目中,需要输出2KHz的脉冲,所以对应的psc和counter如下图所示,占空比pulse先设置为0
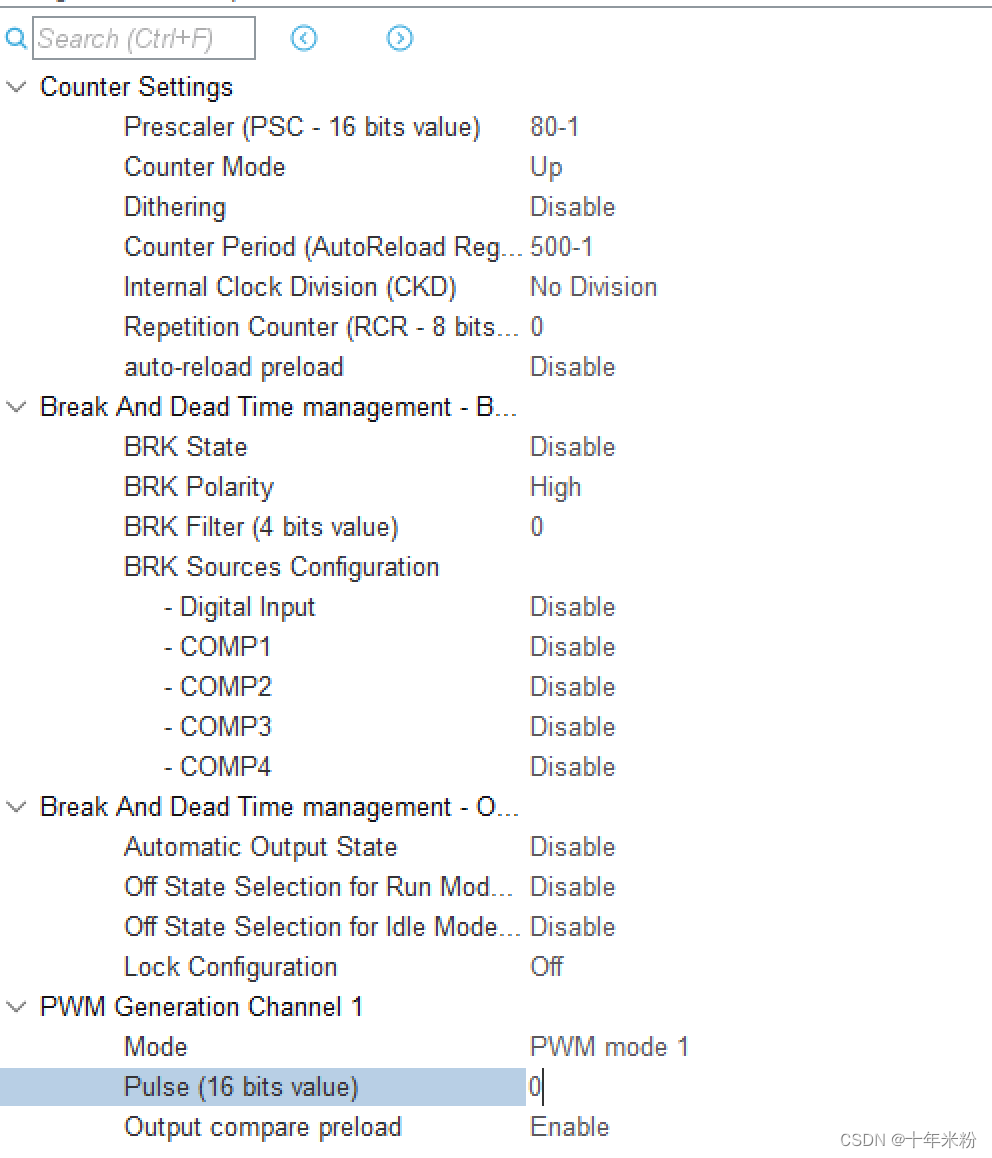
之后可以使用
__HAL_TIM_SetCompare();函数进行修改占空比
二、keil5代码编写
串口通信模块
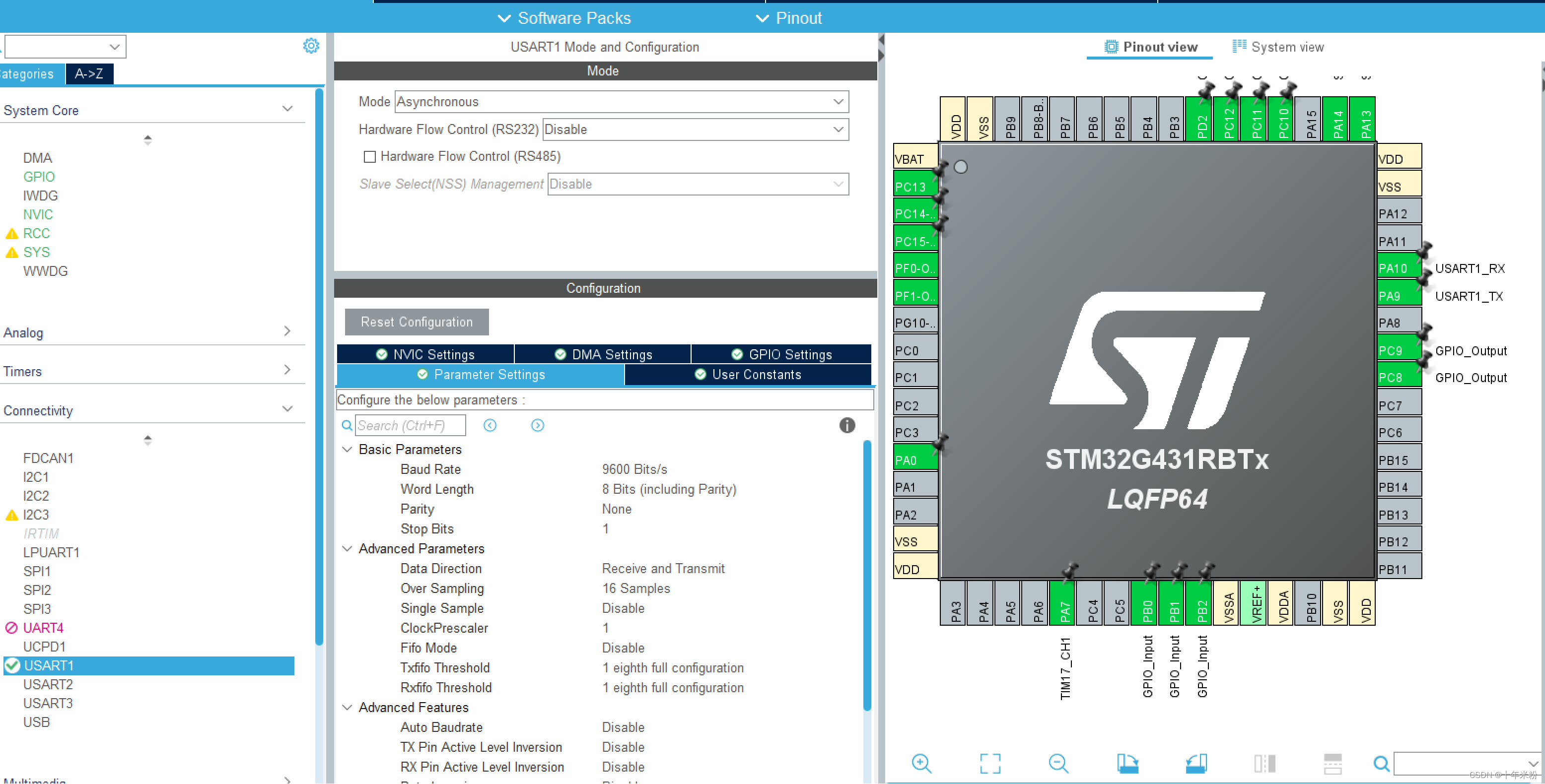
一、cubemax配置
在通信中,先选择usart1 再选择异步通信方式(串口通信都采用异步通信方式),最后修改波特率为题目要求的9600
注意:需要手动修改PA10和PA9(LCD的配置与其有冲突)
二、串口发送模块
串口的发送模块比较简单,就只有几行代码
注意:在前面应该添加include "string.h" 否则会有语法错误
char temp[20];//定义一个数组
sprintf(temp,"frq=%d\r\n",frq1);
HAL_UART_Transmit(&huart1,(uint8_t *)temp,strlen(temp),50);HAL_UART_Transmit(&huart1,(uint8_t *)temp,strlen(temp),50);
用于向指定的UART设备发送数据
&huart1表示串口的地址
(uint8_t *)表示强制类型转换
strlen(temp)表示发送的长度
50表示超时时间
\r和\n一起使用,表示进行换行
三、串口接收模块
interrupt.c
利用中断接收数据
char rxdata[30];
uint8_t rxdat;
uchar rx_pointer;
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *hurat)
{//中断的回调函数
rxdata[rx_pointer++]=rxdat;
HAL_UART_Receive_IT(&huart1,&rxdat,1);
}
HAL_UART_Receive_IT(&huart1,&rxdat,1);
注意:里面的参数都是指针变量
中断每次只能接受一个字符,所以最后的参数只能是1
main.c
用于接收数据
char car_type[5];
char car_data[5];
char car_time[13];
extern char rxdata[30];
extern uint8_t rxdat;
extern uchar rx_pointer;
void uart_rx_proc()
{//用与接收数据
if(rx_pointer>0)
{
if(rx_pointer==22)
{
sscanf(rxdata,"%4s:%4s:%12s",car_type,car_data,car_time);
//将字符串按照指定格式解析储存到对应的变量里面
}
else
{
char temp[20];
sprintf(temp,"Error");
HAL_UART_Transmit(&huart1,(uint8_t *)temp,strlen(temp),50);
}
rx_pointer=0;
memset(rxdata,0,30);//将变量重置为0
}
}变量rx_pointer是一个指针位(仅用来确定在哪个位置)
主程序部分
void _usartMsgProcess(void)
{
char temp[19];
//串口未收到数据该函数应该直接返回
if(strlen((char*)ucRxbuff) == 0) return ;
struct node*msg = NULL;
//串口发送的数据长度不对
if(strlen((char*)ucRxbuff)!= 22)
{
goto MYERROR;
}
//获取本次车辆的车牌 用于查找该车是否已经入库
getStringRxBuffDataByLocation((char*)ucRxbuff,temp,5,9);
msg = searchListNode(pcarMessage,temp);
//车辆出库
if(msg != NULL)
{
uint32_t longTime[3] = {0,0,0};
//记录停车时间 单位为h
double dStopTime = 0;
//记录停车费用 单位为元
double dStopMoney = 0;
//记录开始停车时间 结束停车时间
struct node*eTime = (struct node*)malloc(sizeof(struct node));
getStringRxBuffDataByLocation((char*)ucRxbuff,eTime->ucType,0,4);
eTime->year = getIntRxBuffDataByLocation((char*)ucRxbuff,10,12);
eTime->month = getIntRxBuffDataByLocation((char*)ucRxbuff,12,14);
eTime->day = getIntRxBuffDataByLocation((char*)ucRxbuff,14,16);
eTime->hour = getIntRxBuffDataByLocation((char*)ucRxbuff,16,18);
eTime->minute = getIntRxBuffDataByLocation((char*)ucRxbuff,18,20);
eTime->second = getIntRxBuffDataByLocation((char*)ucRxbuff,20,22);
//判断数据是否合理 不合理直接返回打印错误信息
if(checkData(msg->ucType,eTime->year,eTime->month,eTime->day,eTime->hour,eTime->minute,eTime->second)==0 || strcmp(eTime->ucType,msg->ucType)!=0)
{
goto MYERROR;
}
else
{
//时间转换
longTime[0] = myMktime(2000+msg->year,msg->month,msg->day,msg->hour,msg->minute,msg->second);
longTime[1] = myMktime(2000+eTime->year,eTime->month,eTime->day,eTime->hour,eTime->minute,eTime->second);
longTime[2] = longTime[1]-longTime[0];
//计算停留时间
dStopTime = ceil((double)(longTime[2]*1.0/3600));
//计算停车费
if(msg->ucType[0] == 'C')
dStopMoney = dStopTime*dCnbrPrice;
else
dStopMoney = dStopTime*dVnbrPrice;
//发送信息到PC
sprintf(temp,"%s:%s:%.0f,%.2f",msg->ucType,msg->ucCode,dStopTime,dStopMoney);
HAL_UART_Transmit(&huart1,(uint8_t*)temp,sizeof(temp),150);
//车辆出库
deleteListNode(pcarMessage,msg->ucCode);
}
}
// 新车入库
else
{
//新车入库 需要新增一个节点存储车辆信息
struct node* node = (struct node*)malloc(sizeof(struct node));
node->pNext = NULL;
getStringRxBuffDataByLocation((char*)ucRxbuff,node->ucType,0,4);
getStringRxBuffDataByLocation((char*)ucRxbuff,node->ucCode,5,9);
node->year = getIntRxBuffDataByLocation((char*)ucRxbuff,10,12);
node->month = getIntRxBuffDataByLocation((char*)ucRxbuff,12,14);
node->day = getIntRxBuffDataByLocation((char*)ucRxbuff,14,16);
node->hour = getIntRxBuffDataByLocation((char*)ucRxbuff,16,18);
node->minute = getIntRxBuffDataByLocation((char*)ucRxbuff,18,20);
node->second = getIntRxBuffDataByLocation((char*)ucRxbuff,20,22);
//判断数据是否合理 不合理直接返回打印错误信息
if(checkData(node->ucType,node->year,node->month,node->day,node->hour,node->minute,node->second)==0 || pcarMessage->uiIdleCount-1<0)
goto MYERROR;
//数据无误 添加车辆信息到存储链表中
else
addListNode(pcarMessage,node);
}
//清除本次串口接收到的数据 避免影响后续数据
memset(ucRxbuff,0,sizeof(ucRxbuff));
//处理完本次串口接收到的数据后清除标志位
iRxFlag = 0;
return ;
//接收数据出现问题时 发送错误信息到PC
MYERROR:
HAL_UART_Transmit(&huart1,(uint8_t*)"Error\r\n",sizeof("Error\r\n"),50);
//清除本次串口接收到的数据 避免影响后续数据
memset(ucRxbuff,0,sizeof(ucRxbuff));
//处理完本次串口接收到的数据后清除标志位
iRxFlag = 0;
}
结语
对于我来说,存储车辆信息的方式以及处理串口数据是试题中比较难的部分,花了挺久的时间才搞懂,最后代码有些许问题,仅供参考还请见谅















 334
334











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









