






1. 读写内部FLASH
1.1 关于内部FLASH
几乎所有的MCU内部都会有一块Flash,用于保存要运行的代码。在电脑上交叉编译得到二进制文件后,使用烧写器将该文件烧写到内部Flash上。MCU上电后,自动读取Flash上的内容并加载到内存,CPU再从内存执行代码内容。由于Flash掉电数据不丢失的特性,每次上电后,MCU都能执行同一个程序,直至Flash上的内容被重新烧写。
通常习惯上,使用内部Flash存储运行代码,外部Flash存储(前面“21.1 关于SPI”介绍的外部SPI接口Flash)存储需要掉电保存的数据。但这也不是绝对的,如果没有外部Flash,需要掉电保存的数据也可以放在内部Flash未使用的区域。
STM32内部也有一块Flash,不同的型号其Flash的容量大小也不一样,从“图 2.2.4 STM32芯片命名规则(仅适用于MCU)”可知,STM32的Flash(闪存)容量从1KB至2048KB不等。如下表 35.1.1 所示,为STM32闪存容量密度分类,本开发板使用的STM32F103ZET6的容量为512KB,属于高密度(HD:High-Density)系列。
- 表 1.1.1 STM32 闪存容量密度等级

主要由三部分组成:主存储器、信息块、闪存存储器接口寄存器。
①主存储器
用于存储数据的区域,地址范围为0x08000000~0x0807FFFF,分为256页,每页2KB(中、低密度的系列为1KB),总计512KB。当启动引脚BOOT0为低电平时,系统将从0x08000000地址开始读取代码,也就是从主存储器(Main Flash memory)启动。
②信息块
由两部分组成:系统存储(System memory)和选项字节(Option Bytes)。
系统存储区域大小为2KB,存放有ST出厂固化的程序代码,该代码可实现从UART接收数据并烧写到主存储器区。当启动引脚BOOT0为高电平,BOOT1为低电平时,系统将从0x1FFFF000地址开始读取代码,该代码将从UART收到的数据写到主存储器。也就是通过UART实现程序的下载。
选项字节区域大小为16 Bytes,用于设置内存读写保护、硬件看门狗软硬模式等功能,可通过ST-Link等调试工具查看该部分寄存器状态。
③闪存存储器接口寄存器
用于控制闪存的读写、管理等,后面对闪存操作时,再介绍具体功能。
- 图 1.1.1 Flash 模块组织结构(高密度)

对Flash核心的操作就是读写,下面详细介绍如何对Flash进行读写。
①读Flash
从STM32总线结构框图”可知,内核使用ICode指令总线访问Flash的指令,使用DCode
数据总线访问Flash的数据。
Flash存储器有两个64位缓存器组成的预取缓冲器,使得CPU可以工作在更高频率,同时需要根据不同的系统时钟(SYSCLK)频率设置对应的等待周期(LATENCY)。系统时钟与等待周期关系如表 1.1.2 所示。通常系统时钟为72MHz,则需要设置2个等待周期(LATENCY),否则读写Flash可能出错,导致死机等情况。 - 表 1.1.2 系统时钟与等待周期关系

正确设置求好等待周期后,可以利用指针进行读取数据。例如,从地址addr读取一字节数据。可将addr强制转换为uint32_t指针,然后取该指针所指向地址的值,即得到addr地址的数据:

②写Flash
内部Flash的写操作要繁琐一些,一共需要分为四个步骤:解锁->擦除->写数据->上锁。 - 解锁
MCU复位后,闪存编程和擦除控制器(FPEC)处于锁定保护状态,此时闪存控制寄存器(FLASH_CR)不可操作。需要将两个特定的解锁序列号(Key1=0x45670123 Key2=0xCDE89AB)写入闪存键值寄存器(FLASH_KEYR)以解锁FPEC模块。 - 擦除
由于Flash物理特性(只能写0,不能写1),在写Flash前需要进行擦除操作,将Flash全变为0xFFFF。FPEC支持页擦除(Page Erase)和批量擦除(Mass Erase),设置步骤如图 1.1.2 所示。 - 图 1.1.2 擦除内部 FLASH 流程
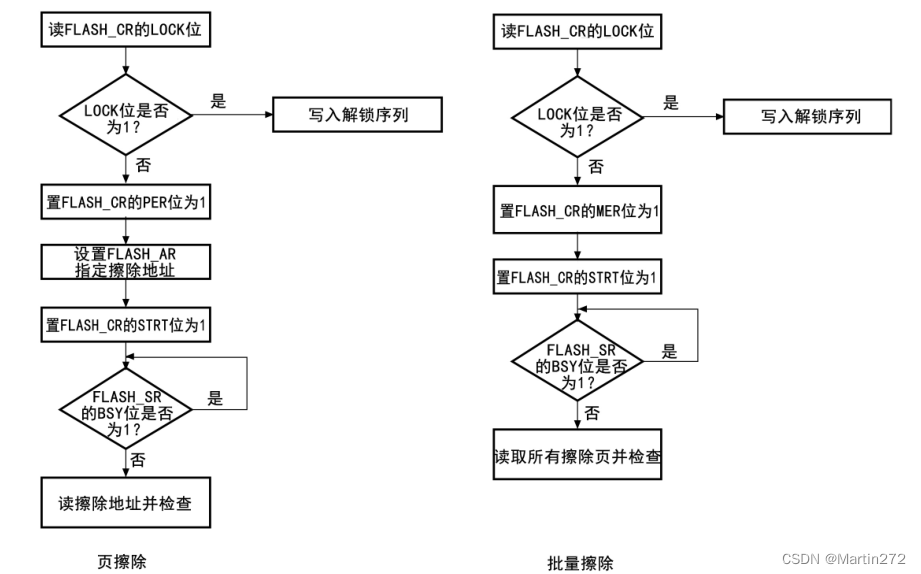
a) 检查FLASH_CR[LOCK]得知是否解锁,如果没解锁则先解锁;
b) 检查FLASH_SR[BSY]得知是否处于忙状态,如果忙则等待其变为空闲;
c) 如果是页擦除,设置FLASH_CR[PER]为1,即页擦除模式,再设置FLASH_AR指定擦除地址;如果是批量擦除,设置FLASH_CR[MER]为1,即主存储器所有页(批量)擦除模式;
d) 设置FLASH_CR[STRT]为1,启动擦除;
e) 检查FLASH_SR[BSY]直至擦除完成;
f) 如果是页擦除,读取被擦除的页并检查;如果是批量擦除,读取所有的页并检查;
- 写数据
擦除完后,便可以向FLASH写数据,设置步骤如图 1.1.3 所示。 - 图 1.1.3 写内部 FLASH 流程
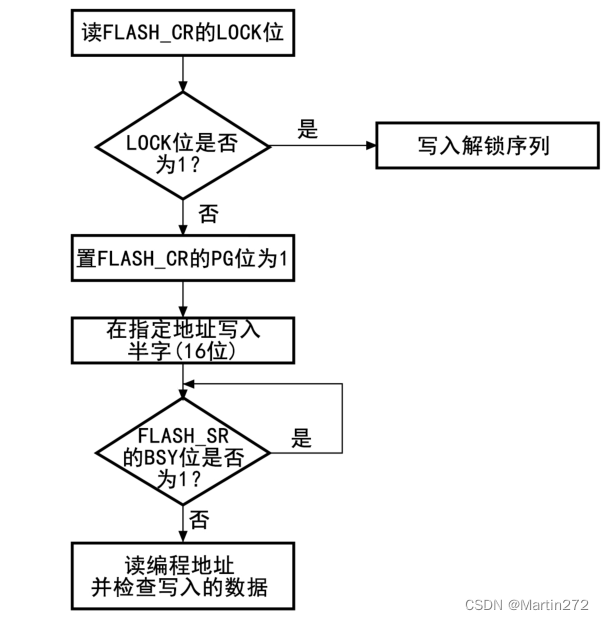
a) 检查FLASH_CR[LOCK]得知是否解锁,如果没解锁则先解锁;
b) 检查FLASH_SR[BSY]得知是否处于忙状态,如果忙则等待其变为空闲;
c) 设置FLASH_CR[PG]为1,即Flash编程模式;
d) 向主存储器的指定地址写入数据,每次写入数据的长度为半字(16位);
e) 检查FLASH_SR[BSY]直至写完成;
f) 读取被写地址并检查写入的数据;
- 上锁
写Flash操作结束后,需要设置FLASH_CR[LOCK]为1,使FPEC模块重新上锁,以防止数据被不小心修改。
1.2 硬件设计
内部Flash的读写不涉及硬件设计。
1.3 软件设计
1.3.1 软件设计思路
实验目的:本实验对内部Flash进行读写。
- 实现Flash读写函数;
- 主函数编写控制逻辑:产生若干随机数,按键按下,将数据写入内部Flash,再读出对比;
1.3.2 软件设计讲解
- 设置等待周期
前面提到,不同的系统时钟,需要设置对应的等待周期,以确保能正确读取内部Flash。当系统时钟为72MHz,则需要设置2个等待周期(LATENCY)。
在系统时钟配置函数“SystemClock_Config()”,其实一直都做了这个操作,如代码段 1.3.1 所示。
代码段 1.3.1 系统时钟配置(stm32f1xx_clk.c)
/*
* @brief System Clock Configuration
* The system Clock is configured as follow :
* System Clock source = PLL (HSI)
* SYSCLK(Hz) = 72000000
* HCLK(Hz) = 72000000
* AHB Prescaler = 1
* APB1 Prescaler = 2
* APB2 Prescaler = 1
* PLLMUL = 9
* Flash Latency(WS) = 2
* @param None
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
while(1);
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
while(1);
}
}
在42行,使用“HAL_RCC_ClockConfig()”配置RCC结构体“RCC_ClkInitStruct”时,另一个参数就是Flash延时,传入“FLASH_LATENCY_2”表示设置2个等待周期。
- 读内部Flash
读内部Flash比较简单,直接通过指针获取或者使用C库提供的内存拷贝函数获取,如代码段 1.3.2 所示。
代码段 1.3.2 读内部 Flash(driver_flash.c)
/*
* 函数名:void ReadFlash(uint32_t startAddr, uint32_t *pdata, uint32_t length)
* 输入参数:startAddr-> 读首地址; pdata -> 读出的数据指针; length -> 读的字节个数
* 输出参数:无
* 返回值:无
* 函数作用:读内部 flash
*/
void ReadFlash(uint32_t startAddr, uint32_t *pdata, uint32_t length)
{
#if 1
// 方式一:使用指针获取数据
uint16_t i = 0;
for(i=0; i<length; i++) // 读取 length 个数据
{
pdata[i]=*(uint32_t*)startAddr; // 将指定地址数据保存到 pata
startAddr = startAddr + 4; // 地址加 4,即下一个 32 位数据位置
}
#else
// 方式二:使用 C 库的内存拷贝函数获取数据
memcpy((uint32_t*)pdata, (uint32_t*)startAddr, sizeof(uint32_t)*length);
#endif
}
- 11~17行:使用指针方式获取数据;
- 19~20行:使用C库的内存拷贝函数获取数据;
- 写内部Flash
写内部Flash,按照前面介绍的解锁->擦除->写数据->上锁顺序,依次操作即可,如代码段 1.3.3 所示。
代码段 1.3.3 写内部 Flash(driver_flash.c)
/*
* 函数名:void WriteFlash(uint32_t startAddr, uint32_t *pdata, uint32_t length)
* 输入参数:startAddr-> 写首地址; pdata -> 写的数据指针; length -> 写的字节个数
* 输出参数:无
* 返回值:无
* 函数作用:写内部 flash
*/
void WriteFlash(uint32_t startAddr, uint32_t *pdata, uint32_t length)
{
uint32_t i = 0;
uint32_t address = startAddr;
HAL_FLASH_Unlock(); // 解锁
EraseFlash(startAddr, length); // 擦除
for(i=0; i<length;i++) // 开始写数据
{
if (HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, address, pdata[i]) == HAL_OK)
{
address = address + 4;
}
}
HAL_FLASH_Lock(); // 上锁
}
- 13行:使用HAL库提供的“HAL_FLASH_Unlock()”函数解锁Flash;
- 15行:擦除Flash,该函数的实现,后面讲解;
- 17~23行:使用HAL库提供的“HAL_FLASH_Program()”函数写数据,这里写入的数据类型支持半字节(half-word,16位)、一字节(word,32位)、双字节(double word,64位),但实际最后都是以半字节16位写入;这里传入的数据是uint32_t类型,因此每次写一字节;
- 24行:使用HAL库提供的“HAL_FLASH_Lock()”函数上锁Flash;
在写Flash之前,需要进行擦除操作。擦除有两种方式,页擦除(Page Erase)和批量擦除(Mass Erase),这里不能使用批量擦除,会导致下载测试程序也被擦除,无法执行代码,因此只能使用页擦除。
页擦除的处理方式也有两个思路,一个是根据要写入的大小,计算要擦除页数,对应擦除;另一个则是擦除整个测试区域的Flash。
在擦除之前,先理解如代码段 1.3.4 所示的几个宏定义。
代码段 1.3.4 测试相关宏定义(driver_flash.h)
#define TEST_CODE_SIZE (1024*8) // 本程序代码约为 7.89KB
#define TEST_PAGE_ADDR (0x08000000 + TEST_CODE_SIZE) // 写起始地址需要在 FLASH 上代码之后
#define TEST_PAGE_SIZE (1024*10) // 10KB
#define TEST_PAGE_END_ADDR (TEST_PAGE_ADDR + 4*TEST_PAGE_SIZE)// 用于测试的 Flash 空间结束地址
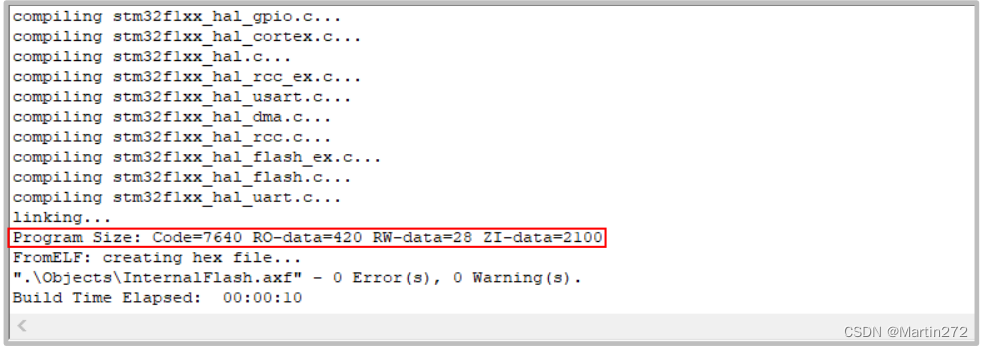
- 1行:定义本程序占用Flash的大小。可通过生成的Bin文件大小得知,如图 1.3.1 所示,“InternalFlash.bin”的大小为8088字节。也可通过Keil编译完成的提示,计算得到占用Flash大小,如图 1.3.2 所示,Code表示代码占用空间,存放在Flash;RO-data表示只读常量占用空间,存放在Flash;RW-data表示初始化后的变量占用空间,存放在Flash;ZI-data表示未初始化的变量占用空间,它存放在BSS段,不占用Flash空间。因此,7640+420+28=8088字节,与bin文件信息一致;
- 2行:定义用户写Flash的起始地址;0x0800000为内部Flash的起始地址,从该地址之后,存放本程序,我们只能操作本程序占用空间之后的Flash空间,否则将破坏本程序,无法执行;
- 3行:定义可用于操作的Flash大小,理论上余下的512KB-8KB=504KB空间都可以使用;
- 4行:定义可用于操作的Flash的结束地址;
图 1.3.1 bin 文件信息

- 图 1.3.2 Keil 编译完成提示
了解前面几个宏定义后,再来看如代码段 1.3.5 所示的擦除函数。
代码段 1.3.5 擦除内部 Flash(driver_flash.c)
/*
* 函数名:void EraseFlash(uint32_t addr, uint32_t length)
* 输入参数:addr -> 擦除地址; length -> 擦除的字节个数
* 输出参数:无
* 返回值:无
* 函数作用:擦除内部 flash
*/
void EraseFlash(uint32_t addr, uint32_t length)
{
uint32_t nPageError = 0;
EraseInitStruct.TypeErase = FLASH_TYPEERASE_PAGES; // 页擦除
EraseInitStruct.PageAddress = addr; // 擦除的起始地址
#if 1
// 方式一:只擦除用到的页
EraseInitStruct.NbPages = (addr + length*4)/FLASH_PAGE_SIZE - addr/FLASH_PAGE_SIZE + \
(((addr + length*4)%FLASH_PAGE_SIZE)?1:0);
#else
// 方式二:擦除整个测试页
EraseInitStruct.NbPages = (TEST_PAGE_END_ADDR - addr) / FLASH_PAGE_SIZE;
#endif
if (HAL_FLASHEx_Erase(&EraseInitStruct, &nPageError) != HAL_OK) // 擦除 Flash
{
Error_Handler();
}
}
- 12行:设置页擦除方式,这里只能为页擦除;
- 13行:设置擦除的起始地址,仅用于页擦除模式;
- 16~18行:设置需要擦除的页数;计算要擦除的整页数,加上不足一页时擦除一页,即为需要使用/擦除的页;
- 20~21行:设置需要擦除的页数;擦除整个定义用于操作的Flash;
- 24~27页:调用HAL提供的“HAL_FLASHEx_Erase()”函数进行擦除;
- 主函数控制逻辑
在主函数里,初始化系统时钟、打印串口、按键后,循环检测按键是否按下。当按键按下后,产生随机数据,然后写入内部Flash,再读出比较,如代码段 1.3.6 所示。
代码段 1.3.6 主函数控制逻辑(main.c)
while(1)
{
if(rw_flag)
{
rw_flag = 0;
// 准备随机生成的写入数据
for(i=0;i< TEST_NUM;i++)
{
write_data[i] = rand();
}
// 读写 FLASH
if (TEST_NUM > TEST_PAGE_SIZE)
{
printf("ERROR: 超出测试 FLASH 空间\n\r");
break;
}
WriteFlash(TEST_PAGE_ADDR, write_data, TEST_NUM); // 写内部 FLASH
ReadFlash(TEST_PAGE_ADDR, read_data, TEST_NUM); // 读内部 FLASH
// 判断读写的数据是否一致
for(i=0;i< TEST_NUM;i++)
{
if(read_data[i] != write_data[i]) // 如果出现不一致
{
printf("Error! \n\r");
printf("ReadData[%03d]=0x%08x WriteData[%03d]=0x%08x \n\r", i, read_data[i], i, write_data[i]);
break;
}
else
{
printf("ReadData[%03d]=0x%08x WriteData[%03d]=0x%08x \n\r", i, read_data[i], i, write_data[i]);
}
}
if(i == TEST_NUM) // 每次校验都通过
{
printf("----内部 Flash 读写校验通过----\n\r");
}
}
}
2. 串口IAP更新
2.1 关于IAP
2.1.1 烧录方式介绍
在实际项目开发过程中,通常使用仿真器通过JTAG等接口进行调试和程序下载。在产品发布后,可能需要软件更新升级,此时无法要求用户使用仿真器烧录,这就需要实现通过程序实现应用程序的更新升级。
首先介绍常见的几种烧录方式。
- 在电路编程(In Circuit Programing,ICP):不要求MCU内部有任何程序,直接对MCU的Flash写入程序。例如平时使用仿真器通过JTAG、SWD等方式烧录;
- 在系统编程(In System Programing,ISP):利用半导体厂商在MCU内部固化的一段程序(通常称之为引导加载程序,BootLoader),通过串口等接口,实现向Flash写入程序。例如STM32通过调整BOOT引脚,从内部系统存储器启动,启动后接收串口数据,写入到Flash,实现程序的烧录;
- 在应用编程(In Applicating Programing,IAP):开发者自行设计BootLoader程序,从串口、CAN、以太网等获取程序后,写入到Flash,实现程序的烧录;
2.1.2 IAP 原理介绍
本实验通过IAP实现应用程序的更新,这里重点介绍一下IAP的实现原理。
通常MCU内部只会有一个程序,而IAP方案则有两个程序,一个是引导加载程序BootLoader,一个是用户程序APP。MCU上电后,首先运行BootLoader,在BootLoader里选择是运行APP程序还是更新APP程序。
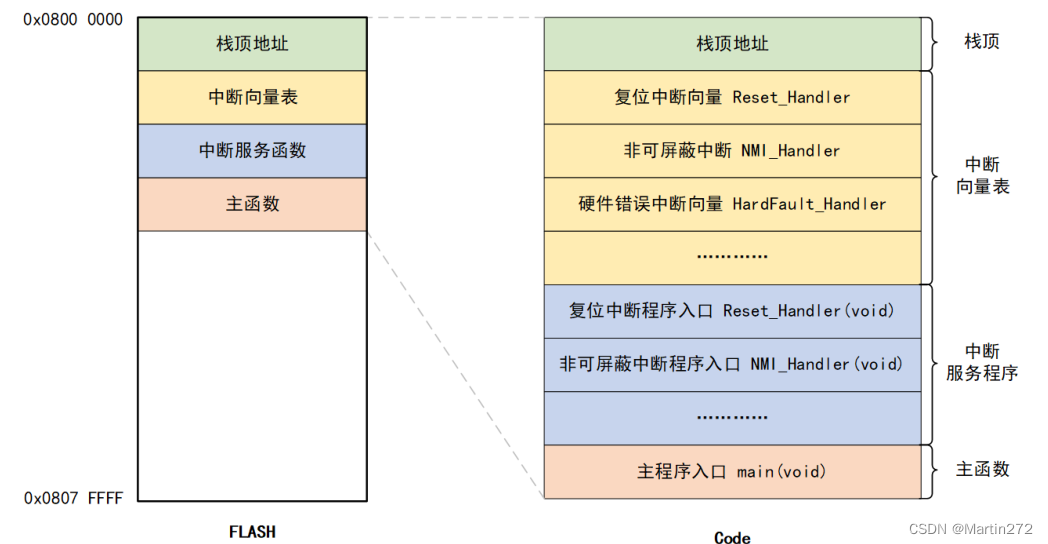
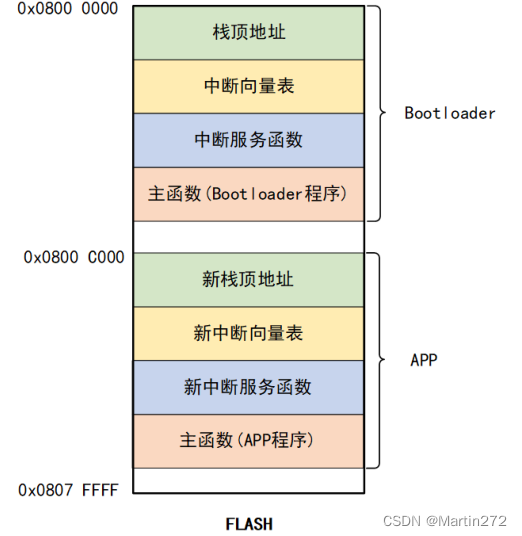
STM32F103ZET6的Flash的地址为0x0800 000~0x0807 FFFF,当STM32从Flash启动,即从0x0800 0000处读取代码数据。由分析STM32的启动文件“startup_stm32f103xe.s”,可得知STM32代码在Flash的分布如图2.1.1 所示。首先存放的是栈顶指针对应的地址,然后是各中断向量地址,再是各中断服务函数,最后是主函数等。当Flash内部只有一个程序时,0x0800 0000存放堆栈栈顶的地址,0x0800 0004存放复位中断向量的地址,即复位中断程序“Reset_Handler(void)”,该函数又调用__main,切换到C语言主函数执行。在主函数产生中断时,再跳到对应中断向量表,执行中断服务程序。
-
图2.1.1 STM32 代码在 Flash 的分布
当Flash内部有两个程序时,MCU上电后,先执行到Bootloader的主函数。Bootloader的代码可实现跳到0x0800 C000处(APP代码存放地址,大于Bootloader代码即可),从而运行APP主函数。同时Bootloader的代码可实现从其它通信接口(比如串口)获取APP程序,然后利用前面实验学到读写内部Flash操作,将APP程序写入Flash的0x0800 C000中,再重新跳转到APP程序,实现APP程序的更新。 -
图 2.1.2 IAP 方案代码在 Flash 的分布
2.1.3 Ymodem 协议
前面提到,Bootloader的代码可实现从其它通信接口获取APP程序。这里的其它通信接口可以是串口、以太网口、I 2 C、SPI、CAN等,理论上只要是能传输数据的通信接口,都可以用于从外部获取APP程序。
其中通过串口获取数据最为常见,因此这里以串口为例,介绍STM32通过串口接收APP程序。当电脑与STM32通过串口连接后,需要Windows将APP程序通过串口发送出去,这里可以自己Windows编程制定传输协议实现上位机软件,也可以直接使用串口工具(比如MobaXterm、SecureCRT)的文件传输协议,这里直接使用串口工具的文件传输协议。
串口文件传输协议通常有如下几种:
- Xmodem:早期最广泛的文件传输协议之一,将128个字节作为一个数据块进行传输,并且对每个数据块都进行循环冗余校验(Cyclic Redundancy Check, CRC),每检查一个数据包正确后返回一个ACK响应;
- Ymodem:Xmodem的改进版,在一些地方也被称为Xmodem-1K,将1024个字节作为一个数据块进行传输,并对每个数据块也都进行CRC校验,每检查一个数据包正确后返回一个ACK响应;
- Zmodem:采用流式传输,不需要每个数据包传输后发送ACK确认,当校验出错时,只发送出错数据包,从而提高效率;
Ymodem涉及的控制字符如表 2.1.1 所示,传输协议如图 2.1.3所示。整个传输过程可分为四个阶段:
- 阶段一:接收 端 等待数据接收此时接收端不断发出字符C。
- 阶段 二 : 首个数据 包的发送及确认发送端发送首个数据包,该数据包里面有文件名信息。数据包格式为:类型+序列号+序列号反码+数据内容+CRC高8位+CRC低8位。
- 类型:用于表示数据包大小。当类型为SOH时,表示本数据包携带的数据长度为128字节;当类型为STX时,表示本数据包携带的数据长度为1024字节;
- 序列号:表示数据包的序号,从0开始,依次递增;
- 序列号反码:表示数据包的序号反码,值为0xFF-序列号;
- 数据内容:首个数据包包含传输的文件名和文件大小,以ASCII字符串存放(空字符结尾),余下部分用空字符填充;
- CRC高8位:表示CRC的高8位,用于CRC-16校验;
- CRC低8位:表示CRC的低8位,用于CRC-16校验;
发送端发送完数据包后,接收端返回ACK信号,并发送字符C。
-
阶段三 : 文件内容的传输 及确认
随后发送端将不断发送数据包,接收端收到数据包后CRC校验无误,返回ACK信号。 -
阶段四 : 文件传输结束发送端的数据包发送完后,发送EOT信号,接收端先返回NAK信号,随后发送端再发送EOT信号,接收端返回ACK信号,再不断发出字符C,进入下一次接收准备。
以上就是标准Ymodem协议流程,实际开发中,可能因为串口工具的不同,导致协议略有差异,根据实际情况对应修改即可。 -
表 2.1.1 Ymodem 协议相关控制字符


-
图 2.1.3 Ymodem 协议传输示意图
2.2 硬件设计
串口IAP升级不涉及新硬件设计。
2.3 软件 设计
2.3.1 软件设计思路
实验目的:本实验通过串口,使用Ymodem协议下载程序,然后将程序烧写到Flash,实现对应用程序的更新/升级。
- 实现操作菜单,根据用户选择,对应执行启动应用程序或下载升级程序;
- 实现跳转到应用程序地址;
- 实现Ymodem协议接收数据,并实现写Flash;
2.3.2 软件设计讲解
- 实现操作菜单
Bootloader启动后,首先应显示操作菜单供用户操作,如果用户无操作,将倒计时自动选择,如代码段2.3.1 所示。
代码段 2.3.1 操作菜单(menu.c)
Serial_PutString((uint8_t *)"\n\r");
Serial_PutString((uint8_t *)"===================== 主菜单 ========================\n\r");
Serial_PutString((uint8_t *)"输入 1:加载内部 FLASH 程序 (5 秒后默认选择)\n\r");
Serial_PutString((uint8_t *)"输入 2:通过串口 Ymodem 协议下载程序到内部 FLASH\n\r");
Serial_PutString((uint8_t *)"输入 3:通过串口 Ymodem 协议下载程序到内部 FLASH 并启动\n\r");
Serial_PutString((uint8_t *)"=====================================================\n\r");
// 清除串口数据寄存器内容
__HAL_UART_FLUSH_DRREGISTER(&husart);
// 接收用户输入的选择或倒计时自动选择 2
for (;time_out >= 0; time_out--)
{
HAL_UART_Receive(&husart, &key, 1, RX_TIMEOUT_1S);
Serial_PutString((uint8_t *)"倒计时:");
Serial_PutByte(time_out+48); // 数字转化为对应的 ASCII 字符
Serial_PutString((uint8_t *)"\r");
if (key > 0)
{
time_out = 5;
break;
}
else if (time_out == 0)
key = '1';
}
- 1~6行:串口打印操作提示信息:输入1则从内部Flash启动;输入2则通过串口下载程序;输入3则先下载程序再启动;
- 9行:清除串口数据寄存器内容,准备接收串口收到的数据;
- 12~26行:接收用户输入的选择或倒计时自动选择2;
- 12行:由time_out限制循环次数;
- 14行:串口接收数据保存到变量key,超时时间为1秒钟;
- 16~18行:打印倒计时;
- 19~23行:如果收到串口数据,跳出循环;
- 24~25行:如果time_out秒后,依旧没有输入,则默认输入了‘1’;
- 实现跳转到应用程序地址
当无任何输入超时或用户输入‘1’,则尝试跳到应用程序地址,执行应用程序,如代码段 36.3.2 所示。代码段 2.3.2 跳转到应用程序(menu.c)
case '1' :
Serial_PutString((uint8_t *)"\n\r......开始加载内部 FLASH 程序......\n\r\n\r");
// 根据程序加载地址保存的栈地址内容,判断加载地址是否有程序,并检查大小合法性
if (((*(__IO uint32_t*)APPLICATION_ADDRESS) & 0x2FFF0000 ) == 0x20000000)
{
__set_MSP(*(__IO uint32_t*) APPLICATION_ADDRESS); // 设置用户程序栈指针
JumpAddress = *(__IO uint32_t*) (APPLICATION_ADDRESS + 4); // 得到用户程序地址(复位中断向量地址)
JumpToApplication = (pFunction) JumpAddress;
JumpToApplication(); // 跳至用户程序地址执行
}
else
{
Serial_PutString((uint8_t *)"---> 错误:内部 FLASH 程序无程序或程序损坏,请先重新下载程序......\n\r");
}
break;
- 5行:根据程序加载地址(自定义的0x0800 C000)保存的栈地址内容(等于APP的RW-data+ZI-data+0x20000000,即APP能用到栈最高地址)。将该值和0x2FFF 0000与运算,判断该值是否在SRAM(0x2000 0000~0x2000 FFFF)范围内,在范围内说明加载地址保存的APP程序栈地址正确,即APP程序存在,且没超出SRAM范围;
- 6行:设置用户程序栈指针;
- 7行:参考前面代码在Flash的分布知识,0x0800 C004存放复位中断向量,即真正用户程序地址;
- 9~10行:跳至用户程序地址执行;
- 实现Ymodem 协议接收数据
当用户输入‘2’,则尝试通过串口下载程序到内部Flash,如代码段 2.3.3 所示。
代码段 2.3.3 调用串口下载(menu.c)
case '2' :
Serial_PutString((uint8_t *)"\n\r");
RLED(ON); // 准备下载,点亮红灯
SerialDownload(); // 从串口下载数据到内部 FLASH
RLED(OFF); // 下载完成,点亮绿灯
GLED(ON);
key = 0;
break;
- 3~6行:下载前先三色LED亮红色,下载完后后亮绿色,串口下载如代码段 2.3.4 所示;
代码段 2.3.4 串口下载(menu.c)
/*
* 函数名:void SerialDownload(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:串口通过 Ymodem 协议下载程序
*/
void SerialDownload(void)
{
uint8_t number[11] = {0};
uint32_t size = 0;
COM_StatusTypeDef result;
Serial_PutString((uint8_t *)"等待文件发送……(输入字母'A 或 a'退出)\n\r");
result = Ymodem_Receive(&size); // 串口通过 Ymodem 协议接收数据
HAL_Delay(10);
if (result == COM_OK) // 接收正常
{
Serial_PutString((uint8_t *)"3 下载成功!\n\r");
Serial_PutString((uint8_t *)"下载文件名: ");
Serial_PutString(aFileName);
Int2Str(number, size); // int 类型转 str 字符串
Serial_PutString((uint8_t *)"\n\r 大小: ");
Serial_PutString(number);
Serial_PutString((uint8_t *)" Bytes\n\r");
}
else if (result == COM_LIMIT)
{
Serial_PutString((uint8_t *)"\n\r 下载程序大小超过 FLASH 空间!\n\r");
}
else if (result == COM_DATA)
{
Serial_PutString((uint8_t *)"\n\r 数据校验错误!\n\r");
}
else if (result == COM_ABORT)
{
Serial_PutString((uint8_t *)"\n\r 用户中断操作!\n\r");
}
else
{
Serial_PutString((uint8_t *)"\n\r 接收文件失败!\n\r");
}
}
- 15行:使用Ymodem接收数据,然后根据返回结果,打印对应提示信息;
Ymodem协议中,发送端发过来的数据都是数据包的形式,获取数据包如代码段 2.3.5 所示。
代码段 2.3.5 获取数据包(ymodem.c)
/*
* 函数名:static HAL_StatusTypeDef ReceivePacket(uint8_t *p_data, uint32_t *p_length, uint32_t timeout)
* 输入参数:timeout->重新接收超时时间
* 输出参数:p_data->指向接收的数据 p_length->指向接收数据长度
* 返回值:HAL_OK->正常返回 HAL_BUSY->被用户中止
* 函数作用:接收来自发送者的数据包
*/
static HAL_StatusTypeDef ReceivePacket(uint8_t *p_data, uint32_t *p_length, uint32_t timeout)
{
uint32_t crc;
uint32_t packet_size = 0;
HAL_StatusTypeDef status;
uint8_t char1;
*p_length = 0;
status = HAL_UART_Receive(&husart, &char1, 1, timeout); // 接收一个字节数据
if (status == HAL_OK)
{
switch (char1) // 判断接收的内容
{
case SOH: // SOH 表示本数据包大小为 128 字节
packet_size = PACKET_SIZE; // 定义包大小 128 字节
break;
case STX: // STX 表示本数据包大小为 1K 字节
packet_size = PACKET_1K_SIZE; // 定义包大小 1K
break;
case EOT: // EOT 表示传输完成
break;
case CA: // 连续收到两个 CA(Cancel)表示取消传输
if ((HAL_UART_Receive(&husart, &char1, 1, timeout) == HAL_OK) && (char1 == CA)) //再接收到一个 CA
packet_size = 2; // 定义包大小 2 字节
else
status = HAL_ERROR;
break;
case ABORT1: // ABORT 表示中止(收到 A/a),返回 HAL_BUSY
case ABORT2:
status = HAL_BUSY;
break;
default:
status = HAL_ERROR;
break;
}
*p_data = char1; // 保存接收的数据
if (packet_size >= PACKET_SIZE ) // 如果数据包>=128 字节,即接收数据包
{
// 串口接收数据(保存位置:p_data[2]开始 保存长度:数据长度+数据包其它信息-数据包起始信号
status = HAL_UART_Receive(&husart, &p_data[PACKET_NUMBER_INDEX], packet_size + PACKET_OVERHEAD_SIZE - 1, timeout);
if (status == HAL_OK) // 简单的检查数据包完整性
{
if (p_data[PACKET_NUMBER_INDEX] != ((p_data[PACKET_CNUMBER_INDEX]) ^ NEGATIVE_BYTE)) // 反码校验
{
packet_size = 0;
status = HAL_ERROR;
}
else // CRC 校验
{
crc = p_data[ packet_size + PACKET_DATA_INDEX ] << 8; // CRC 高 8 位
crc += p_data[ packet_size + PACKET_DATA_INDEX + 1 ]; // CRC 低 8 位
if (Cal_CRC16(&p_data[PACKET_DATA_INDEX], packet_size) != crc ) // CRC16 校验
{
packet_size = 0;
status = HAL_ERROR;
}
}
}
else
{
packet_size = 0;
}
}
}
*p_length = packet_size; // 返回包大小
return status;
}
- 16行:首先获取数据包第一个字节数据;
- 18~43行:根据第一个字节数据内容,可得知数据包大小,以及修改不同状态标志;
- 46~70行:如果发过来的是数据包,需要对数据进行校验;
- 49~50行:接收余下的数据包,长度为:数据长度+数据包其它信息-数据包起始信号;
- 54~58行:利用反码校验数据;
- 59~68行:利用CRC-16校验数据;
收到数据包,校验无误后,再对数据包的内容进行解析。该部分代码比较长,这里分段讲解,如代码段2.3.6 所示。
代码段 2.3.6 数据包解析 1(ymodem.c)
switch (ReceivePacket(aPacketData, &packet_length, DOWNLOAD_TIMEOUT)) // 接收数据包
{
case HAL_OK: //正常接收
……
case HAL_BUSY: // 中止传输
Serial_PutByte(CA);
Serial_PutByte(CA);
result = COM_ABORT;
break;
default:
if (session_begin > 0)
{
errors ++;
}
if (errors > MAX_ERRORS) // 中止通信
{
Serial_PutByte(CA);
Serial_PutByte(CA);
}
else
{
Serial_PutByte(CRC16); // 发送字符 C,请求数据包
}
break;
- 1行:接前面接收数据包,根据返回状态;
- 3~4行:正常数据包的处理,放在后面讲解;
- 5~9行:如果想中止传输,输入A/a后,将返回HAL_BUSY,发送“CA“信号,取消传输;
- 10~25行:其它情况。根据错误次数决定中止传输,或者发送“C”信号,等待下一次传输;
正常数据包的解析如代码段 2.3.7 所示。
代码段 2.3.7 数据包解析 2(ymodem.c)
switch (packet_length) // 根据数据长度对应处理
{
case 2: // 发送方中止
Serial_PutByte(ACK); // 发送 ACK
result = COM_ABORT;
break;
case 0: // 正常传输结束
Serial_PutByte(ACK); // 发送 ACK
file_done = 1;
break;
default: // 正常数据包
if (aPacketData[PACKET_NUMBER_INDEX] != packets_received) // 数据包编号和接收数量序号不一致
{
Serial_PutByte(NAK); // 发送 NAK 信号
}
else
{
if (packets_received == 0) // 第一个数据包,为起始帧,包含文件信息
{
if (aPacketData[PACKET_DATA_INDEX] != 0) // 数据包数据不为空
{
// 提取文件名
i = 0;
file_ptr = aPacketData + PACKET_DATA_INDEX;
while ( (*file_ptr != 0) && (i < FILE_NAME_LENGTH))
{
aFileName[i++] = *file_ptr++;
}
// 提取文件大小
aFileName[i++] = '\0';
i = 0;
file_ptr ++;
while ( (*file_ptr != ' ') && (i < FILE_SIZE_LENGTH))
{
file_size[i++] = *file_ptr++;
}
file_size[i++] = '\0';
Str2Int(file_size, &filesize); // 字符串转 int 类型
// 测试要发送的 image 是否大于 FLASH 大小
if (*p_size > (USER_FLASH_SIZE + 1))
{
// 超出限制,结束会话
tmp = CA;
HAL_UART_Transmit(&husart, &tmp, 1, NAK_TIMEOUT);
HAL_UART_Transmit(&husart, &tmp, 1, NAK_TIMEOUT);
result = COM_LIMIT;
}
//先擦除用户程序区域
FLASH_If_Erase(APPLICATION_ADDRESS);
*p_size = filesize;
Serial_PutByte(ACK); // 数据帧正常,返回 ACK 信号
Serial_PutByte(CRC16); // 返回 C 信号
}
else // 文件头数据包为空,结束会话
{
Serial_PutByte(ACK);
file_done = 1;
session_done = 1;
break;
}
}
else // 数据包
{
ramsource = (uint32_t) & aPacketData[PACKET_DATA_INDEX]; // 得到数据包数据
// 将接收的数据写入 FLASH
if (FLASH_If_Write(flashdestination, (uint32_t*) ramsource, packet_length/4) == FLASHIF_OK
)
{
flashdestination += packet_length;
Serial_PutByte(ACK);
}
else // 写入 FLASH 出错
{
// 数据错误,结束会话
Serial_PutByte(CA);
Serial_PutByte(CA);
result = COM_DATA;
}
}
packets_received ++; // 接收数据包数量加 1
session_begin = 1; // 会话开始标记
}
break;
}
break;
- 1行:根据数据包长度,进行对应处理;
- 3~6行:数据长度为2,即收到两个CA(Cancel),表示取消传输,返回ACK结束;
- 7~10行:数据长度为0,正常传输完成,返回ACK结束;
- 11~91行:其它数据长度;
- 12~15行:数据包编号和接收数量序号不一致,返回NAK信号;
- 18行:如果是第一个数据包,则包含文件信息;
- 21~40行:提取文件名信息、文件大小信息;
- 42~50行:判断文件大小是否超过定义的Flash可用大小,如果超过返回“CA”信号,结束会话;
- 53~54行:擦除Flash,为后面写Flash做准备;
- 56~57行:首个数据包正常,返回ACK和字符C信号;
- 67行:首个数据包后,后面传的数据包都是文件内容;
- 69行:获取数据包数据;
- 72~84行:将接收的数据写入Flash,关于擦除、写Flash这块的函数操作,与前面读写Flash讲解的一致,这里就不再赘述;
- 主函数控制逻辑
在主函数里,初始化串口、Flash、LED灯,显示主菜单,如代码段 2.3.8 所示。
代码段 2.3.8 主函数控制逻辑(main.c)
// 初始化内部 Flash
FLASH_If_Init();
// 初始化 LED 灯
LedGpioInit();
// 显示主菜单
Main_Menu();
while(1)
{
}
3. 读写外部SRAM
3.1 关于外部SRAM
3.1 FSMC 接口介绍
STM32F103ZET6的内部有64KB的SRAM,可以满足大部分的应用场景,但在一些采集数据比较多的项目、应用算法或GUI(Graphical User Interface,图形用户界面)等应用场景,内部SRAM可能就不够了,此时就需要外部扩展SRAM。
STM32F103系列中,100脚及以上的MCU,都有一个FSMC(Flexible Static Memory Controller,灵活的静态存储器控制器),该外设是STM32设计的一种存储器控制技术,仅适用STM32系列的MCU。它可以驱动SRAM、NOR Flash、NAND Flash等存储器,但不能驱动SDRAM等动态存储器。
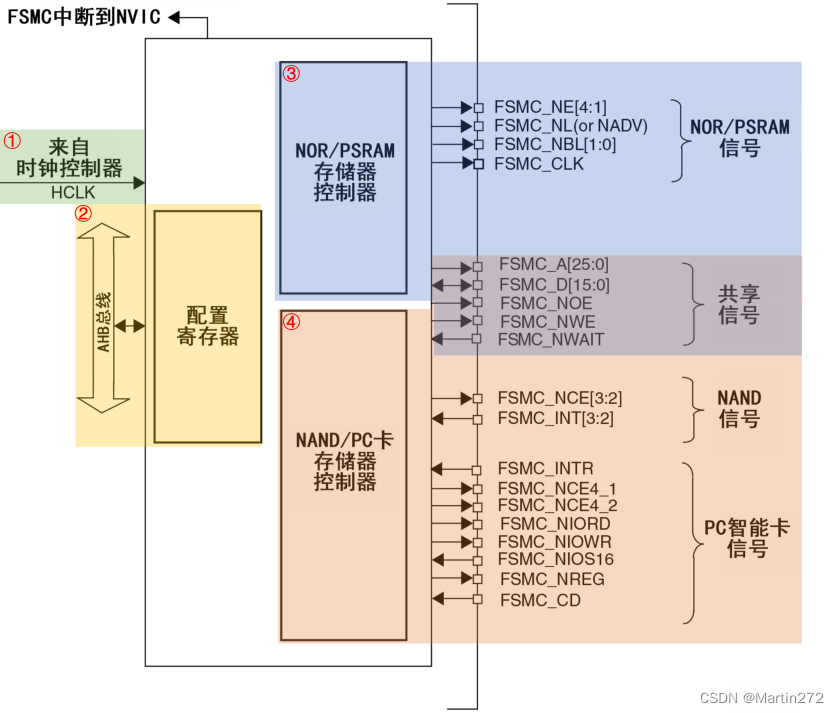
FSMC内部框图如图 3.1.1 所示,可以看作四部分组成。
① 时钟源
结合时钟树” 可知,FSMC挂在AHB总线下。因此,在使用FSMC时,需要先使能AHB总线时钟。
②AHB 总线 接口
AHB总线接口是CPU、DMA等AHB总线主设备访问FSMC的通道,它负责将AHB总线信号转换成外设通信协议。配置寄存器则描述了扩展外设的具体形式、通信协议和接口形式。
③NOR/PSRAM 存储器控制器
配置寄存器描述外设的特征和时序后,控制器将自动生成对应的驱动时序,以驱动8位、16位、32位的异步SRAM、异步PSRAM或NOR闪存。
④NAND/PC卡 卡 存储器控制器
配置寄存器描述外设的特征和时序后,控制器将自动生成对应的驱动时序,以驱动8位、16位的NAND存储器或16位的PC卡兼容设备。
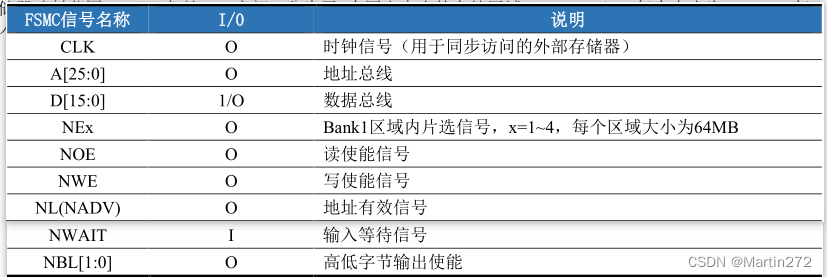
FSMC所接外设共用一组地址总线(A[25:0])、数据总线(D[15:0])、输出使能(NOE)、写使能(NWE)和输入等待(NWAIT),如图 3.1.1 中的“共享信号”。地址总线用于寻址,数据总线用于传输数据,读写使能控制数据传输的方向,输入等待用于同步数据。这几个信号,是最基础的,基本所有外设都需要。
FSMC为所接外设提供一个片选信号,如NOR/PSRAM中的NE信号、NAND/PC卡中的NCE信号。通过片选信号,可以实现总线的分时复用。
剩下的其它外设接口信号,与所接外设有关,不同的外设需要不同的控制信号,比如NL用于NOR Flash的锁存使能、NBL[1:0]用于PSARM的高低字节输出使能。如表 37.1.1 所示,为NOR/PSRAM存储器控制器接口信号总结。
- 图 3.1.1 FSMC 内部框图
- 表 3.1.1 NOR/PSRAM 存储器控制器接口信号
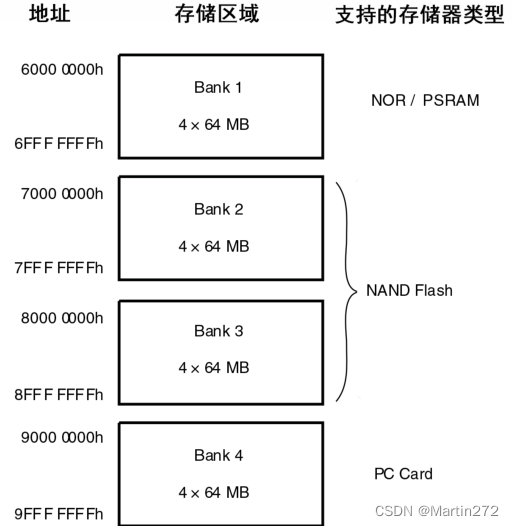
由STM32存储器映射结构”可知,0x6000 0000-0x9FFF FFFF共计1GB空间为FSMC的存储器映射范围。FSMC把这1GB空间,分为了4个固定大小的存储区域(Bank1~4),每个大小为256MB,每个Bank都由一组独立的配置寄存器控制,相互之间不受干扰,如图 3.1.2 所示。
- Bank1(0x6000 000~0x6FFF FFFF):用于NOR/PSRAM设备,该区域又被分为4块,每块64MB,可连接4个NOR Flash设备或PSRAM设备,每个区域通过片选引脚NE[4:1]进行选择;
- Bank2(0x7000 000~0x7FFF FFFF):用于NAND Flash设备;
- Bank3(0x8000 000~0x8FFF FFFF):用于NAND Flash设备;
- Bank4(0x9000 000~0x9FFF FFFF):用于PC卡设备;
- 图 3.1.2 FSMC 存储器地址映射
本章实验重点介绍的如何驱动SRAM,因此重点分析NOR/PSRAM控制器,即Bank1。
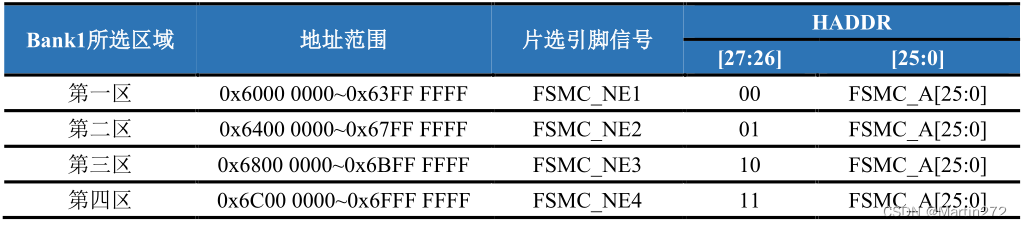
CPU需要28根AHB地址总线,才能寻址完Bank1的256MB空间(2 28 =256MB),这里用HADDR[27:0]表示需要的地址总线。HADDR[25:0]对应连接外部存储器的FSMC_A[25:0],HADDR[26:27]对应片选信号引脚NE[4:1],如表 3.1.2 所示。
- 表 3.1.2 Bank1 存储区选择
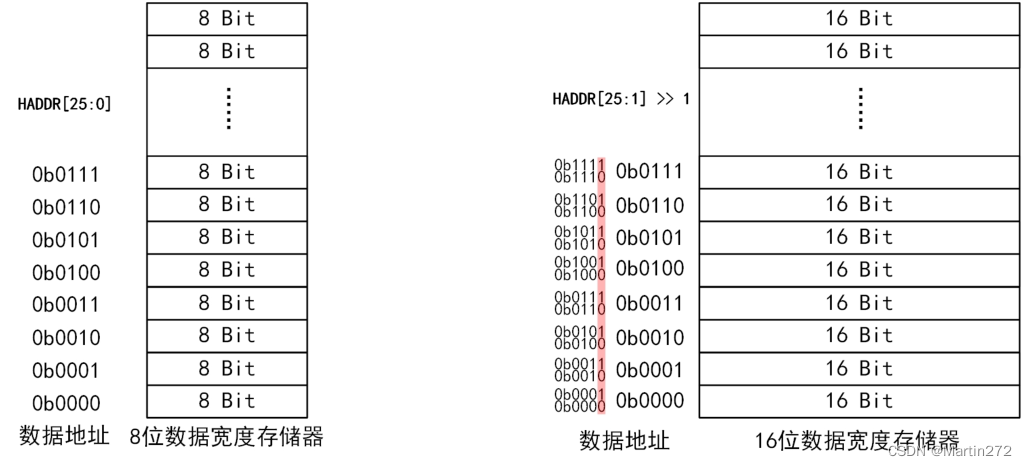
CPU访问一个地址,只能读取一字节(8位)数据,因此当外部存储器数据宽度不同时,实际向存储器发送的地址也将有所不同,如表 3.1.3 所示。 - 表 3.1.3 不同数据宽度发送的地址

假设某8位数据宽度的外部存储器接在Bank1的第一区,则FSMC_NE1连接该外部存储器片选,此时HADDR[26:27]值为0x00;FSMC_A[25:0]连接该外部存储器地址引脚。此时一个地址对应一字节(8位)数据,通过HADDR[25:0]寻址该外部存储器,得到8位数据。
假设某16位数据宽度的外部存储器接在Bank1的第二区,则FSMC_NE2连接该外部存储器片选,此时HADDR[26:27]值为0x01,FSMC_A[25:0]连接该外部存储器地址引脚。此时一个地址对应两字节(16位)数据,通过HADDR[25:1]>>1寻址该外部存储器,得到16位数据。
这里解释下为什么对于16位数据宽度的外部存储器,要使用HADDR[25:1]>>1寻址。假设CPU想访问存储器0b0000地址数据,得到16位数据,此时只能获取此16位的低8位。接着想通过0b0001地址访问剩下的8位,却访问的是下一个16位数据。但如果将访问地址右移1位,即无论是0b0000还是0b0001,都是0b0000,再通过NBLx切换高低8位,即可完整的获取存储器0b0000处的16位数据,如图 3.1.3 所示。
- 图 3.1.3 访问不同数据宽度的存储器
NOR/PSRAM控制器支持同步访问和异步访问,这里的同步、异步概念,与前面“15.3 同步/异步通信”的概念类似。
同步访问需要一个时钟信号作为收发双方的参考信号,FSMC使用HCLK分频后的时钟,作为与外部存储器的时钟同步信号FSMC_CLK。
异步访问无需时钟信号,通过提前制定规则保证数据传输的准确,因此FSMC需要设置多个时间参数,比如数据建立时间(Data-Phase Duration,DATAST)、地址保持时间(Address-hold Phase Duration,ADDHLD)和地址建立时间(Address Setup Phase Duration ,ADDSET)。
NOR/PSRAM控制器支持的器件类型众多,不同的器件读写操作时序会有差异,因此控制器通过切换不同的模式,以支持不同的器件,如表 3.1.4 所示。
- 表 37.1.4 NOR/PSRAM 控制器的异步访问模式
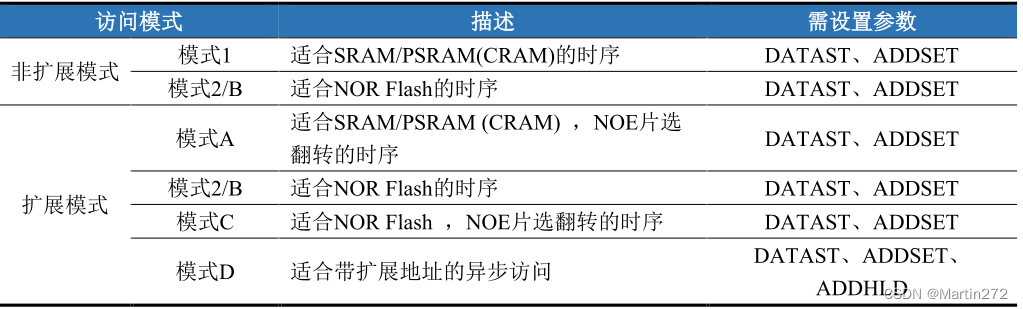
在非扩展模式下(FSMC_BCRx寄存器的EXTMOD位置0),如果连接的是SRAM/PSRAM,则默认访模式为模式1,如果连接的是NOR Flash,则默认访问模式为模式2。
在扩展模式下(FSMC_BCRx寄存器的EXTMOD位置1),支持四种扩展模式:模式A、模式B、模式C和模式D。也可以混合使用模式A、B、C、D的读写操作,比如可以使用模式A进行读,模式B进行写。
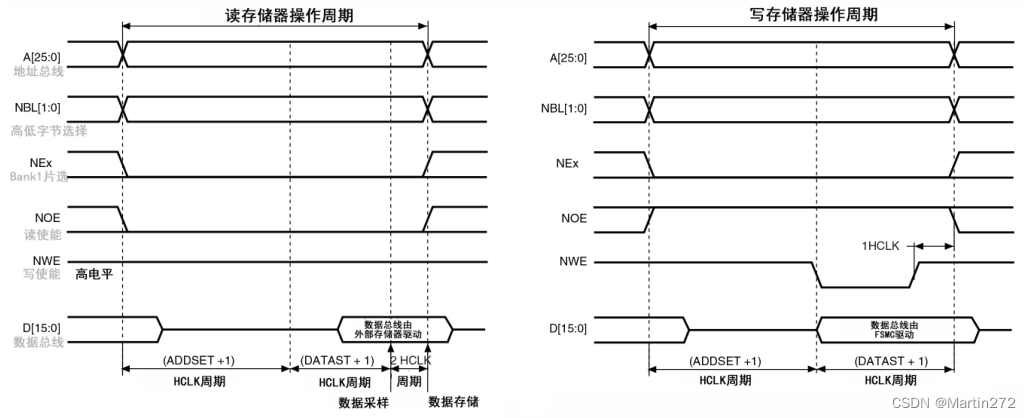
本章实验关于SRAM,因此这里介绍模式1和模式A的时序。模式1读写访问外部存储器的时序如图
3.1.4 所示。
FSMC读外部存储器时,首先Bank1区域内片选信号引脚NEx拉低,选中外部存储器所在Bank;同时读使能信号引脚NOE拉低,写使能信号引脚NWE保持高电平;接着地址总线A[25:0]在高低字节选择信号NBL[1:0]的配合下寻址,经历(ADDSET+1)个HCLK周期完成寻址;在随后的(DATASET+1)个HCLK周期里,外部存储器控制数据总线D[15:0]发送数据;最后,再经历2个HCLK周期后,Bank区域内片选信号引脚NEx和读使能信号引脚NOE都恢复为高电平。
FSMC写外部存储器时,首先Bank区域内片选信号引脚NEx拉低,选中外部存储器所在Bank;同时读使能信号引脚NOE拉高,写使能信号引脚NEW先暂时保持高电平;接着地址总线A[25:0]在高低字节选择信号NBL[1:0]的配合下寻址,经历(ADDSET+1)个HCLK周期完成寻址;然后写使能信号引脚NWE拉低,在随后的(DATASET+1)个HCLK周期里,FSMC控制数据总线D[15:0]发送数据,使能信号引脚NEW提前1个HCLK周期拉高;最后,Bank区域内片选信号引脚NEx恢复为高电平,读使能信号引脚NOE都恢复为低电平。
- 图 3.1.4 FSMC 模式1读写时序
模式A读写访问外部存储器的时序和模式1基本类似,如图 37.1.5所示。主要区别在于FSMC读外部存储器时,读使能信号引脚NOE不是一开始就拉高,而是等寻址完后才拉低。
其它几种模式的时序,这里不再过多赘述,读者在需要用到的时候,参考《参考手册》分析即可。
图 3.1.5 FSMC 模式 A 读写时序SRAM 芯片介绍100ASK_STM32F103开发板,板载一颗ISSI公司(Integrated Silicon Solution, Inc)生产的SRAM芯片IS62WV51216BLL。它是一颗16位数据宽度的512K(512K*16/8=1MB)大小的CMOS静态内存芯片。
如图3.1.6 所示为该芯片的框图和引脚描述,整个框图可以看作两部分组成。
- 图 3.1.6 IS62WV51216BLL 框图和引脚描述
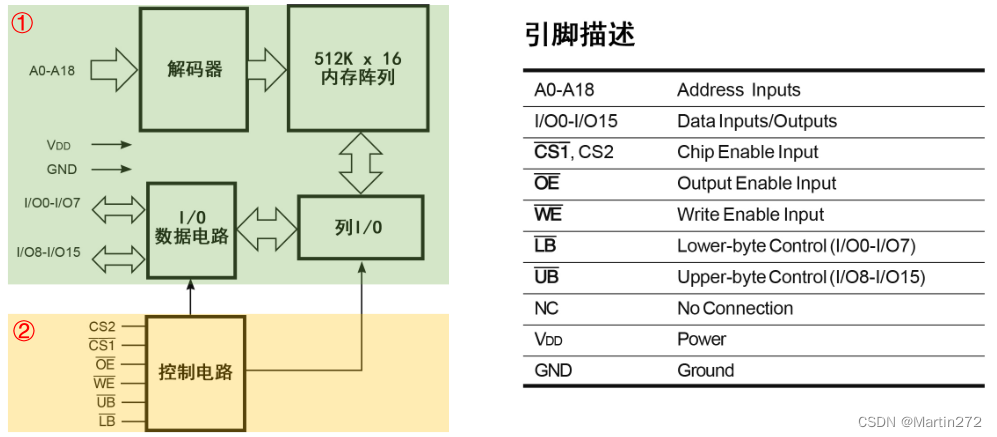
①地址 、数据部分
- A0-A18:为地址输入,一共19根,寻址范围为219=524288/1024=512K,每个地址存放16Bit数据,总容量1MB;
- I/O0-I/O15:为数据输入/输出,一共16根,传输16Bit数据;
②控制部分
- CS1,CS2:为片选信号,其中有上划线的CS1为低电平有效,CS2为高电平有效;CS2仅存在于48脚的mini BGA封装,开发板上使用的44脚的TSOP封装没有该脚;
- OE :输出(读)使能信号,低电平有效;
- WE :写使能信号,低电平有效;
- UB :高字节控制信号(I/O8-I/O15),低电平有效;
- LE :低字节控制信号(I/O0-I/O17),低电平有效;
最后,再看一下IS62WV51216BLL的真值表,如图 37.1.7 所示,重点关注后面的读、写模式。
在读模式下,写使能 WE 拉高,片选CS1 拉低,读使能OE 拉低, 低字节控制信号LE 拉低则I/O0-I/O7输出数据, 高字节控制信号 UB拉低则I/O8-I/O15输出数据。
在写模式下,写使能 WE拉低,片选CS1拉低,读使能OE拉高, 低字节控制信号LE拉低则I/O0-I/O7输入数据, 高字节控制信号 UB拉低则I/O8-I/O15输入数据。
- 图 37.1.7 真值表
在这里插入图片描述
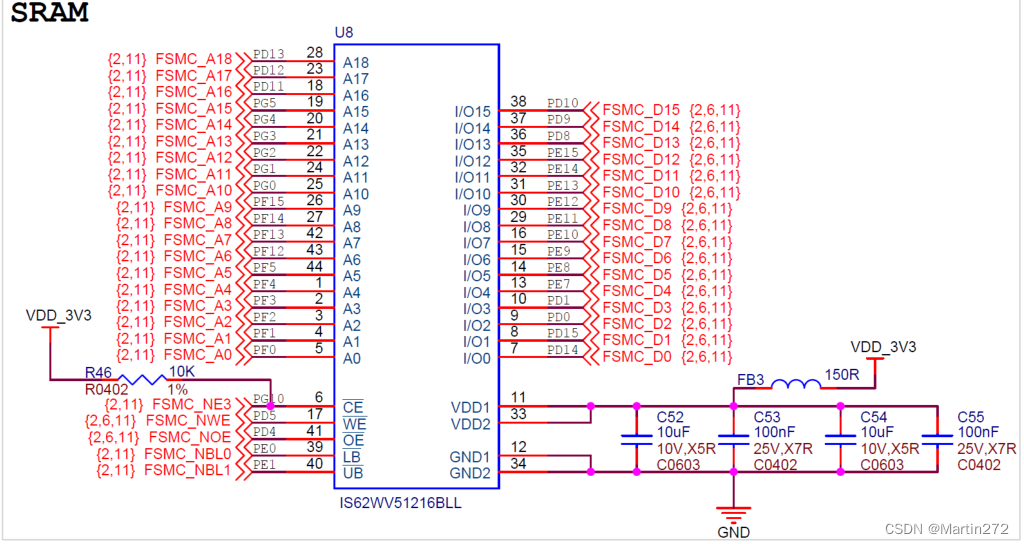
3.2 硬件设计
如图 3.2.1 为开发板SRAM部分的原理图,U8为SRAM芯片IS62WV51216BLL。FSMC的A0-A18接在SRAM的A0-A18,FSMC的D0-D15接在SRAM的I/O0~I/O15,FSMC_NE3接在SRAM的片选上(即选择的Bank1的第三区域),FSMC_NWE接在SRAM的 WE ,FSMC_NOE接在SRAM的 OE, FSMC_NBL0和NBL1接在SRAM的 LE和UB 。
涉及的GPIO端口包含D、E、F、G,后面初始化引脚时,需要使能这些引脚所在端口的时钟。
- 图 37.2.1 SRAM 原理图
3.3 软件设计
3.3.1 软件设计思路
实验目的:本实验使用FSMC接口对外部SRAM进行读写。
- 初始化FSMC相关参数:配置时间参数、模式选择等;
- 初始化FSMC涉及的硬件相关参数:初始化时钟、配置涉及的GPIO;
- 封装外部SRAM的读写函数;
- 主函数编写控制逻辑:产生若干随机数,按键按下,将数据写入外部SRAM,再读出对比;
3.3.2 软件设计讲解
- GPIO端口定义
由前面原理图可知,IS62WV51216BLL需要用到40个GPIO,其中地址线19个,数据线16个,控制信号线5个,涉及GPIO端口D、E、F、G,这里先定义涉及的GPIO端口,方便后面初始化使用,如代码段 3.3.1所示。
代码段 37.3.1 相关宏定义(driver_fsmc.h)
/****************** BANK1 Address *****************/
#define BANK1_AREA1_ADDR ((uint32_t)(0x60000000))
#define BANK1_AREA2_ADDR ((uint32_t)(0x64000000))
#define BANK1_AREA3_ADDR ((uint32_t)(0x68000000))
#define BANK1_AREA4_ADDR ((uint32_t)(0x6C000000))
// PD0 PD1 PD4 PD5 PD8 PD9 PD10 PD11 PD12 PD13 PD14 PD15
#define FSMC_GPIOD_PIN ( GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_8 | GPIO_PIN_9 \
| GPIO_PIN_10 | GPIO_PIN_11 | GPIO_PIN_12 | GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15)
// PE0 PE1 PE7 PE8 PE9 PE10 PE11 PE12 PE13 PE14 PE15
#define FSMC_GPIOE_PIN ( GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_7 | GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 \
| GPIO_PIN_11 | GPIO_PIN_12 | GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15)
// PF0 PF1 PF2 PF3 PF4 PF5 PF12 PF13 PF14 PF15
#define FSMC_GPIOF_PIN ( GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 | GPIO_PIN_4 | GPIO_PIN_5 \
| GPIO_PIN_12 | GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15)
// PG0 PG1 PG2 PG3 PG4 PG5 PG10
#define FSMC_GPIOG_PIN ( GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 | GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_10)
- 1~5行:定义Bank1四个区域的起始地址,这里使用FSMC_NE3片选,即外部SRAM的起始地址为0x68000000;
- 7~21行:定义FSMC连接外部SRAM用到的GPIO端口;
- FSMC 初始化
FSMC的初始化,包含两部分:协议部分和硬件部分。
协议部分初始化如代码段 3.3.2 所示。
代码段 3.3.2 FSMC 协议初始化(driver_fsmc.c)
static FSMC_NORSRAM_TimingTypeDef hfsmc_timing;
static SRAM_HandleTypeDef hsram;
static uint8_t fsmc_rw_flag = 0;
/*
* 函数名:void FSMC_SRAM_Init(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:初始化 FSMC
*/
void FSMC_SRAM_Init(void)
{
hfsmc_timing.AddressSetupTime = 0x00; // 地址建立时间 ADDSET 范围:0~15 (模式 A 需要设置)
// hfsmc_timing.AddressHoldTime = 0x01; // 地址保持时间 ADDHLD 范围:1~15
hfsmc_timing.DataSetupTime = 0x02; // 数据建立时间 DATAST 范围:1~255 (模式 A 需要设置)
// hfsmc_timing.BusTurnAroundDuration = 0x00; // 总线恢复时间 BUSTURN 范围:0~15
// hfsmc_timing.CLKDivision = 0x02; // 时钟分频因子 CLKDIV 范围:2~16
// hfsmc_timing.DataLatency = 0x02; // 数据产生时间 ACCMOD 范围:2~17
hfsmc_timing.AccessMode = FSMC_ACCESS_MODE_A; // 模式 A
hsram.Instance = FSMC_NORSRAM_DEVICE; // 实例类型:NOR/SRAM 设备
hsram.Extended = FSMC_NORSRAM_EXTENDED_DEVICE;
hsram.Init.NSBank = FSMC_NORSRAM_BANK3; // 使用 NE3,对应 BANK1(NORSRAM)的区域 3
hsram.Init.DataAddressMux = FSMC_DATA_ADDRESS_MUX_DISABLE; // 地址/数据线不复用(nonmultiplexed)
hsram.Init.MemoryType = FSMC_MEMORY_TYPE_SRAM; // 存储器类型:SRAM
hsram.Init.MemoryDataWidth = FSMC_NORSRAM_MEM_BUS_WIDTH_16; // 选择 16 位数据宽度(所接 SRAM 为 16 位数据宽度)
// hsram.Init.BurstAccessMode = FSMC_BURST_ACCESS_MODE_DISABLE; // 是否使能突发访问,仅对同步突发存储器有效,此处未用到
// hsram.Init.WaitSignalPolarity = FSMC_WAIT_SIGNAL_POLARITY_LOW; // 等待信号的极性,适用于突发模式访问,此处未用到
// hsram.Init.WaitSignalActive = FSMC_WAIT_TIMING_BEFORE_WS; // 存储器是在等待周期之前的一个时钟周期还是等待周期期间使能 NWAIT,适用于突发模式访问,此处未用到
hsram.Init.WriteOperation = FSMC_WRITE_OPERATION_ENABLE; // 存储器写使能
// hsram.Init.WaitSignal = FSMC_WAIT_SIGNAL_DISABLE; // 等待使能位,适用于突发模式访问,此处未用到
hsram.Init.ExtendedMode = FSMC_EXTENDED_MODE_ENABLE; // 启用扩展模式,使用模式 A
// hsram.Init.AsynchronousWait = FSMC_ASYNCHRONOUS_WAIT_DISABLE; // 是否使能异步传输模式下的等待信号,此处未用到
// hsram.Init.WriteBurst = FSMC_WRITE_BURST_DISABLE; // 禁止突发写,适用于突发模式访问,此处未用到
if(HAL_SRAM_Init(&hsram, &hfsmc_timing, &hfsmc_timing) != HAL_OK)
{
Error_Handler();
}
}
-
14~20行:定义NOR/SRAM时序参数;由于外接设备为SRAM,只能使用模式1或模式A,在后面使能了扩展模式,因此这里只能使用模式A;使用模式A需要设置地址建立时间(ADDSET)和数据建立时间(DATAST)两个时序参数;
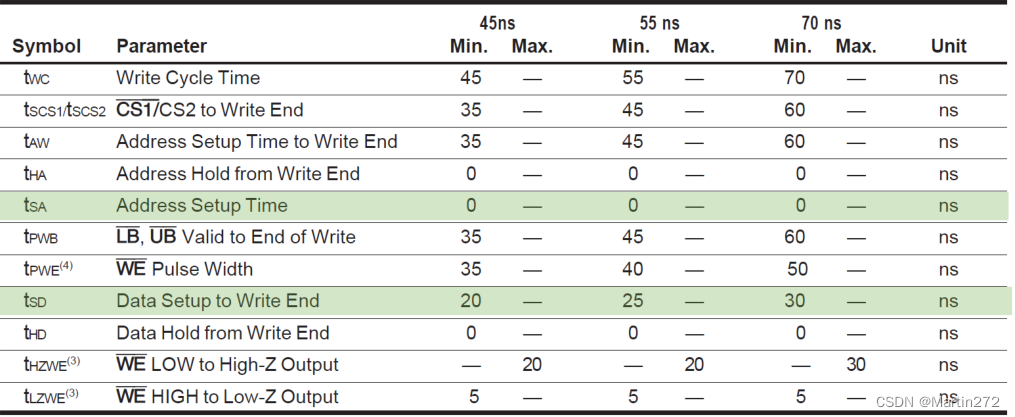
- 14行:设置地址建立时间,取值范围为0~15个T HCLK ,由IS62WV51216BLL芯片手册可知,如图 3.3.1所示,地址建立时间t SA 大于0即可,因此这里设置AddressSetupTime值为0;
- 16行:设置数据建立时间,取值范围为1~255个T HCLK ,由IS62WV51216BLL芯片手册可知,如图 3.3.1所 示 , 数 据 建 立 时 间 t SD 需 要 大 于 20ns , 当 系 统 时 钟 为 72MHz , HCLK 也 为 72MHz ,T HCLK =1/72us=13.8ns,至少需要2个T HCLK 才能大于t SD ,因此这里设置DataSetupTime值为2;
-
图 37.3.1 IS62WV51216BLL 写周期时间特性
- 20行:设置FSMC的访问模式为模式A;
-
22~37行:定义SRAM属性;
- 22~23行:设置实例类型为NOR/SRAM设备;
- 24行:硬件上使用的FSMC_NE3连接的SRAM,因此对应BANK1(NORSRAM)的区域3;
- 25行:地址/数据线不复用(nonmultiplexed);
- 26行:设置存储器类型为SRAM;
- 27行:设置16位数据宽度(所接SRAM为16为数据宽度);
- 33行:存储器写使能;
- 35行:启用扩展模式,这样才能使用前面设置的模式A,否则为模式1;
-
39~42行:使用HAL库提供的“HAL_SRAM_Init()”函数,将前面设置的NOR/SRAM时序参数和定义的SRAM属性初始化;
“HAL_SRAM_Init()”初始化函数会调用“HAL_SRAM_MspInit()”函数初始化硬件,FSMC相关的硬
件初始化如代码段 3.3.3 所示。
代码段 3.3.3 FSMC 硬件相关初始化(driver_fsmc.c)
void HAL_SRAM_MspInit(SRAM_HandleTypeDef *hsram)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_FSMC_CLK_ENABLE(); // 使能 FSMC 时钟
__HAL_RCC_GPIOD_CLK_ENABLE(); // 使能 GPIO 端口 D 时钟
__HAL_RCC_GPIOE_CLK_ENABLE(); // 使能 GPIO 端口 E 时钟
__HAL_RCC_GPIOF_CLK_ENABLE(); // 使能 GPIO 端口 F 时钟
__HAL_RCC_GPIOG_CLK_ENABLE(); // 使能 GPIO 端口 G 时钟
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 配置为复用推挽功能
GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 引脚翻转速率快
// PDx
GPIO_InitStruct.Pin = FSMC_GPIOD_PIN; // 按上面参数配置 D 组所有 GPIO
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
// PEx
GPIO_InitStruct.Pin = FSMC_GPIOE_PIN; // 按上面参数配置 E 组所有 GPIO
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
// PFx
GPIO_InitStruct.Pin = FSMC_GPIOF_PIN; // 按上面参数配置 F 组所有 GPIO
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
// PGx
GPIO_InitStruct.Pin = FSMC_GPIOG_PIN; // 按上面参数配置 G 组所有 GPIO
HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
}
- 5~9行:使能FSMC和涉及GPIO所在端口的时钟;
- 11~13行:设置GPIO为复用推挽上拉模式,翻转速率快;
- 15~29行:依次将涉及的GPIO按上述属性设置;
- 实现SRAM 读写函数
尽管开发板接的外部SRAM是16位数据位,理论上只能一次读、写16位数据。但CPU通过AHB总线访问接在FSMC上的设备,可以按字、半字、字节的方式访问,AHB将自动转换控制FSMC访问。这里以按字读、写为例讲解,如代码段 3.3.4 所示。
代码段 3.3.4 外部 SRAM 按字读写
/*
* 函数名:void SRAM_WriteBufferWord(uint32_t *pdata, uint32_t addr, uint32_t sz)
* 输入参数:pdata->要写入数据的首地址
* addr ->要写到 RAM 的初始地址
* sz ->要写入的数据个数
* 输出参数:无
* 返回值:无
* 函数作用:往片外 RAM 地址 addr 开始写入 sz 个字
*/
void SRAM_WriteBufferWord(uint32_t *pdata, uint32_t addr, uint32_t sz)
{
uint32_t i = 0;
__IO uint32_t offset = (uint32_t)addr;
for(i=0; i<sz; i++)
{
*(__IO uint32_t *)(IS62WV51216_BASE_ADDR + offset) = pdata[i];
offset += 4; // 字 word,32 位,偏移 32/8=4 个地址
}
}
/*
* 函数名:void SRAM_ReadBufferWord(uint32_t *pdata, uint32_t addr, uint32_t sz)
* 输入参数:pdata->要读出数据的首地址
* addr ->要读出的 RAM 的初始地址
* sz ->要写读出的数据个数
* 输出参数:无
* 返回值:无
* 函数作用:往片外 RAM 地址 addr 开始读出 sz 个字
*/
void SRAM_ReadBufferWord(uint32_t *pdata, uint32_t addr, uint32_t sz)
{
uint16_t i = 0;
__IO uint32_t offset = (uint32_t)addr;
for(i=0; i<sz; i++)
{
pdata[i] = *(__IO uint32_t *)(IS62WV51216_BASE_ADDR + offset);
offset += 4; // 字 word,32 位,偏移 32/8=4 个地址
}
}
- 15~19行:循环将每个字写入SRAM;
- 17行:将数据写入SRAM所在的Bank1的区域3地址0x6800 0000;
- 39行:偏移4个地址,准备写下一个字;
- 36~40行:循环从SRAM读出字;
- 17行:从SRAM所在的Bank1的区域3地址0x6800 0000读出数据;
- 39行:偏移4个地址,准备读下一个字;
- 主函数控制逻辑
在主函数里,初始化系统时钟、打印串口、按键后,循环检测按键是否按下。当按键按下后,产生随机数据,然后写入外部SRAM,再读出比较,如代码段 3.3.5 所示。
代码段 37.3.5 主函数控制逻辑(main.c)
// 初始化按键
KeyInit();
while(1)
{
if(FSMC_RW_GetFlag())
{
FSMC_RW_SetFlag(0);
// 准备随机生成的写入数据
for(i=0;i< TEST_NUM;i++)
{
WriteDataBytes[i] = rand();
WriteDataHalfWord[i] = rand();
WriteDataWord[i] = rand();
}
// 读写 N 个字节并判断是否一致
SRAM_WriteBufferBytes(WriteDataBytes, 0, TEST_NUM);
SRAM_ReadBufferBytes(ReadDataBytes, 0, TEST_NUM);
printf("**********************************************\n\r");
for(i=0;i<TEST_NUM;i++)
{
if(WriteDataBytes[i] != ReadDataBytes[i])
printf("Error! \n\r");
printf("WriteBytes[%03d]=0x%02x, ReadBytes[%03d]=0x%02x\n\r", i, WriteDataBytes[i], i, ReadDataBytes[i]);
}
// 读写 N 个半字并判断是否一致
SRAM_WriteBufferHalfWord(WriteDataHalfWord, 1000, TEST_NUM);
SRAM_ReadBufferHalfWord(ReadDataHalfWord, 1000, TEST_NUM);
printf("**********************************************\n\r");
for(i=0;i<TEST_NUM;i++)
{
if(WriteDataHalfWord[i] != ReadDataHalfWord[i])
printf("Error! \n\r");
printf("WriteHalfWord[%03d]=0x%04x, ReadHalfWord[%03d]=0x%04x\n\r", i, WriteDataHalfWord[i], i, ReadDa
taHalfWord[i]);
}
// 读写 N 个字并判断是否一致
SRAM_WriteBufferWord(WriteDataWord, 2000, TEST_NUM);
SRAM_ReadBufferWord(ReadDataWord, 2000, TEST_NUM);
printf("**********************************************\n\r");
for(i=0;i<TEST_NUM;i++)
{
if(WriteDataWord[i] != ReadDataWord[i])
printf("Error! \n\r");
printf("WriteWord[%03d]=0x%08x, ReadWord[%03d]=0x%08x\n\r", i, WriteDataWord[i], i, ReadDataWord[i]);
}
}
}
4. LCD 屏显示
4.1 关于LCD
4.1.1 显示屏基础知识
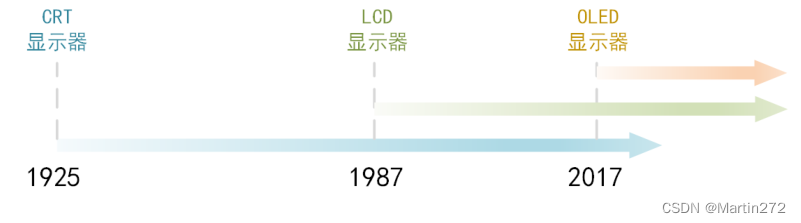
从第一个显示装置发明至今,已经快有百年历史。在显示屏的发展中,依次出现了三大显示技术:CRT、LCD、OLED,如图 4.1.1 所示。
-
图 4.1.1 屏幕发展史
-
CRT 显示屏
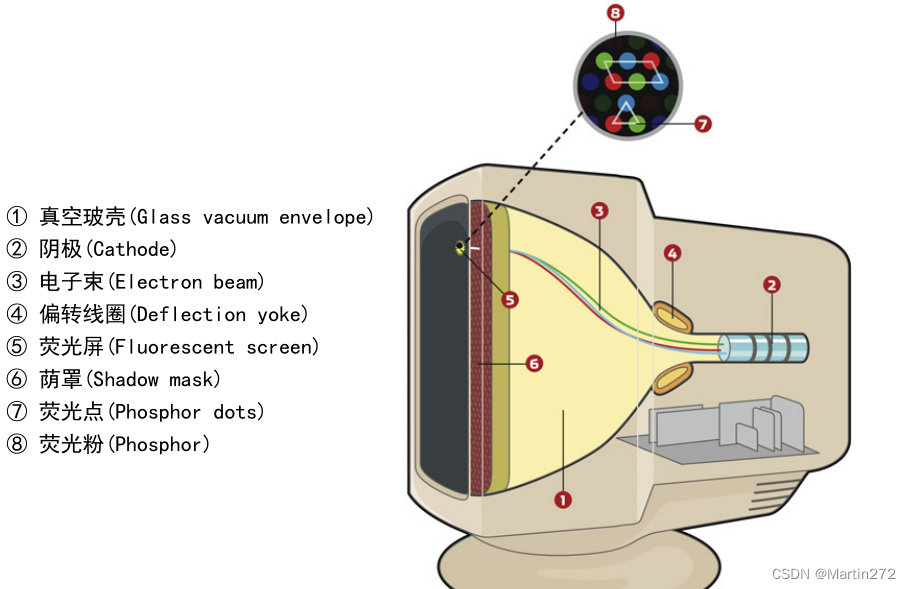
1897年,德国电气工程师、发明家、物理学家和诺贝尔物理学奖获得者卡尔·布劳恩(Karl FerdinandBraun),发明了CRT(Cathode Ray Tube,阴极射线管)用于验证粒子、电子等。直到1925年,约翰·洛吉·贝尔德(John Logie Baird)基于CRT技术创造了世界上最早的电视。在之后的几十年里,无论是电视还是电脑,都使用CRT显示器作为显示屏。如图 4.1.2 所示,CRT显示器有一个很显著的特征,就是受限阴极射线管工作原理,需要纵深很长的内部空间,因此俗称“大屁股电视”,其内部工作原理如图 4.1.3 所示。
- 图 4.1.2 CRT 电脑显示器(左边)和 CRT 电视显示器(右)

在真空玻壳(Glass vacuum envelope,标号①)里,阴极(Cathode,标号②)在电路控制下发出三束由电子组成的电子束(Electron beam)。电路上控制偏转线圈(Deflection yoke,标号④)产生磁场使电子束偏转到荧光屏(Fluorescent screen,标号⑤)指定位置(也就是像素点),荫罩(Shadow mask,标号⑥)用于过滤电子束,防止“溢出”到相邻像素点。荧光屏上布满荧光粉(Phosphor,标号⑧),每个荫罩对应的像素点位置都有三个荧光点(Phosphor dots,标号⑦),分别对应红色、绿色、蓝色,电子打在上面会产生对应颜色的光。通过控制阴极三束电子的发射强度,就能控制三原色各自的亮度,从而组合形成任意颜色。最后,电子枪依次激发屏幕上的所有荧光点,达到一定速度后,由于人的视觉暂留效应(Persistence of vision),就会看到整个屏幕显示图像。
- 图 4.1.3 CRT 显示器工作原理
- LCD 显示屏
1888年,奥地利植物学家和化学家斐德烈‧莱尼泽(Friedrich Reinitzer)从胡萝卜中提炼出一种化合物,该化合物在特定条件下,具备液体的流动性和类似晶体的某种排列特性,因此命名为液晶(Liquid Crystal)。
到20世纪60年代,RCA实验室的研究人员发现液晶在电场的作用下,液晶分子的排列会产生变化,继而造成光线的扭曲或折射,这种现象被称为电光效应。随后在1964年,RCA实验室的研究人员利用液晶的电光效应发明了首个液晶显示器(Liquid Crystal Display,LCD)。
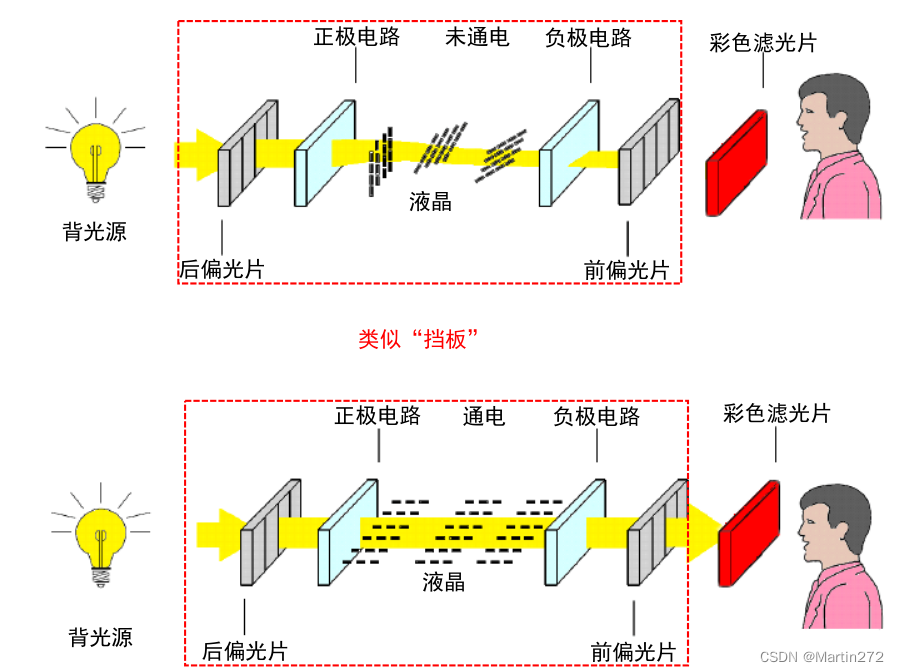
LCD的工作原理如图 4.1.4 所示。首先由背光源产生一个非偏振光源,当它经过后偏光片(假设为垂直偏光片)时,光线将变为垂直偏振,随后该光进入液晶。如果此时电路未通电,相邻液晶分子之间方向略有不同,将垂直偏振光逐渐变为水平偏振光,最后前偏光片(假设为垂直偏光片)将阻挡水平偏振光,观察者只能看到一片黑色。如果此时电路通电,相邻液晶分子在电场作用下统一水平排列,垂直偏振光不发生任何变化,最后通过前偏光片(假设为垂直偏光片)照在彩色滤光片上,观察者将看到一片红色。
这里可以简单的把偏光片、控制电路、液晶看作一个不透光的挡板。可以通过电路实现整个单板的开闭的多少,实现背光源照在彩色滤波片的多少,从而控制红色的亮度。再类似的实现绿色、蓝色,便可实现彩色显示。
- 图 4.1.4 LCD 显示原理
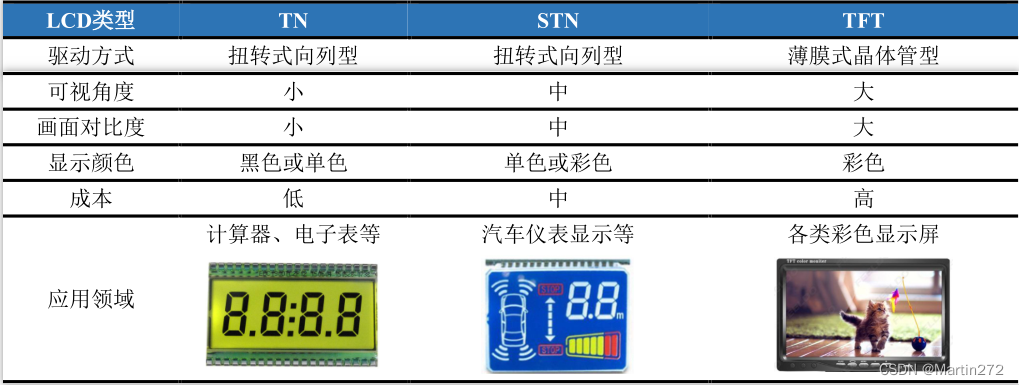
根据液晶排列方式的不同,可分为扭转式向列型(Twisted Nematic, TN)、超扭转式向列型(SuperTwisted Nematic, STN)、横向电场效应型(In Panel Switch,IPS)、垂直排列型 (Vertical Alignment,VA)。
根据驱动形式的不同,可分为无源矩阵液晶显示屏(Passive Matrix LCD,PMLCD),主要用于TN、STN;有源矩阵液晶显示屏(Active Matrix LCD,AMLCD),主要用于TFT。
- 表 4.1.1 常见 LCD 对比
- OLED 显示屏
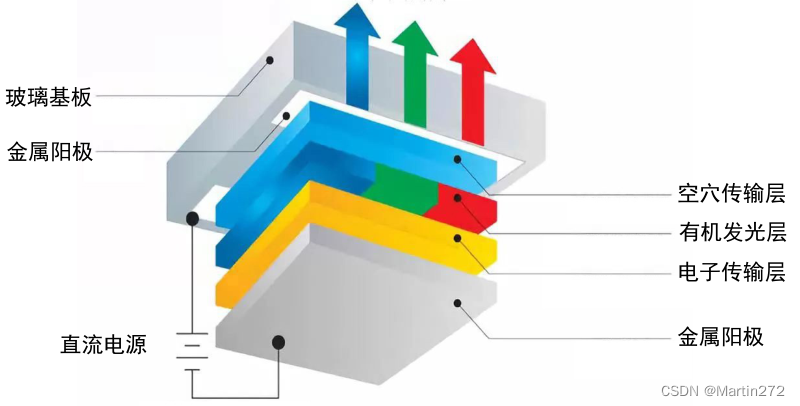
1979年的一天晚上,华裔科学家邓青云(Dr. C. W. Tang)博士在回家路上忽然想起了有东西忘记在实验室。晚上回到实验室,在黑暗中看到机蓄电池在闪闪发光,于是开始了对有机发光二极管的研究。随着有机发光二极管技术难题的逐渐突破,柯达公司生产出有机发光二极管显示器(Organic Light-Emitting Diode,OLED)。
LCD的工作原理如图 4.1.5 所示。OLED的工作原理比较简单,使用有机材料实现了类似半导体PN结的功能效果,通电后有机发光二极管就发光,通的电越多,亮度越高,通过红、绿、蓝不同配比,实现组成各种颜色。
-
图 4.1.5 OLED 显示原理
-
LED 显示屏和 和Micro LED 显示屏
前面OLED使用的有机发光二极管组成显示器,有没有直接使用生活中常见的半导体发光二极管,作为显示屏呢?这个当然有,在很多大型户外广告牌、店招滚动广告上,都能看到LED显示屏的身影,如图 4.1.6所示。
LED显示屏由众多LED灯组成,由于LED灯结构、工艺、散热、成本等限制,无法做得很小,因此画质清晰度比较差,通常用于远距离观看。
- 图 4.1.6 LED 户外显示屏

而Micro LED技术,将LED长度缩小到100μm以下,是常见LED的1%,比一粒沙子还要小。因为MicroLED单元过于微小,加大了制造的复杂性和更多的潜在问题,目前各企业正在积极研发中。
- 图 4.1.7 三星 Micro LED
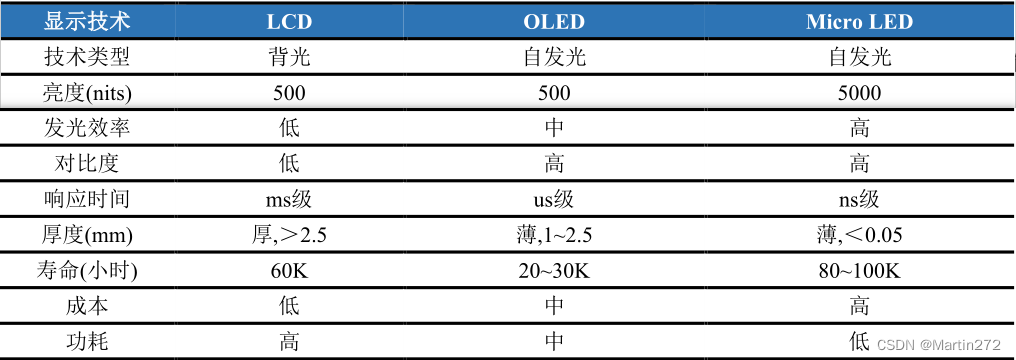
显示屏Micro LED没有LCD的液晶层,可以像OLED一样独立控制每个像素的开关和亮度,继承了几乎所有LCD和OLED的优点,如果后面Micro LED技术成熟,解决生产上的技术难题,那么Micro LED可能将会是下一代主流显示技术。如表4.1.2 所示,为LCD、OLED、Micro LED的对比。
- 表 4.1.2 LCD、OLED、Micro LED 技术对比
- 最后再介绍几个显示屏的基本参数。
- 像素
像素(Pixel)由图像(Picture)和元素(Element)这两个单词的字母所组成。指组成图像的最小单位,也就是前面屏幕中的每一个显示单元。 - 分辨率
由显示像素的数量定义,表示为水平方向的像素数量x垂直方向的像素数量。比如分辨率320x240表示水平方向有320个像素点,垂直方向有240个像素点。 - 色深
由可以绘制像素的颜色数量定义,以每像素位数(bpp)来表示。比如24bpp的色深(也可以使用RGB888表示),即组成每个像素的红、绿、蓝,每个都有2 8 个亮度等级,组合起来就有2^8 *2^8 *2^8 =16777216,即每个像素颜色有16777216种。 - 刷新率
每秒图像刷新的次数,单位Hz。刷新率越高,图像画面看起来过渡更流畅。
4.1.2 显示屏接口介绍
前面介绍了几种常见显示屏工作原理和内部结构,在嵌入式领域,由于成本、使用寿命等限制,通常使用LCD作为显示屏。
通常的嵌入式图形系统如图 4.1.8 所示,可以看作由四部分组成:微控制器、帧缓冲器、显示控制器、显示屏。
- 图 4.1.8 嵌入式图形系统组成示意图
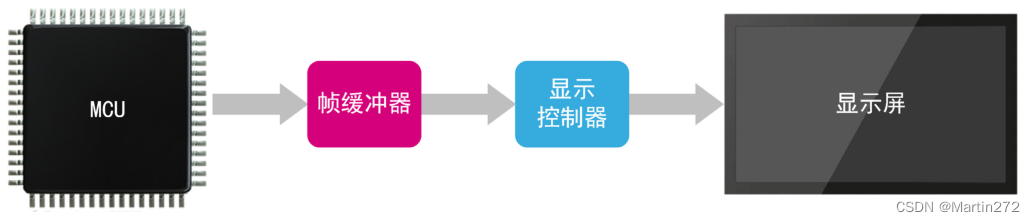
MCU根据代码内容计算需要显示的图像数据,然后将这些图像数据放入帧缓冲器。帧缓冲器本质是一块内存,因此也被称为GRAM(Graphic RAM)。帧缓冲器再将数据传给显示控制器,显示控制器将图像数据解析,控制显示屏对应显示。
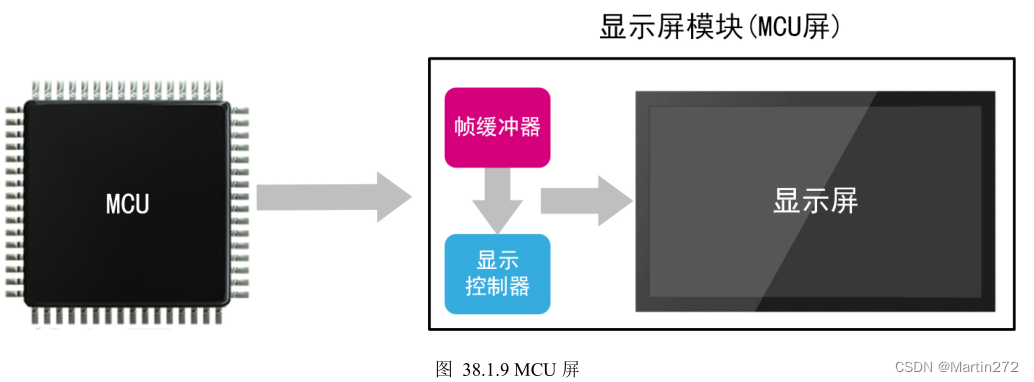
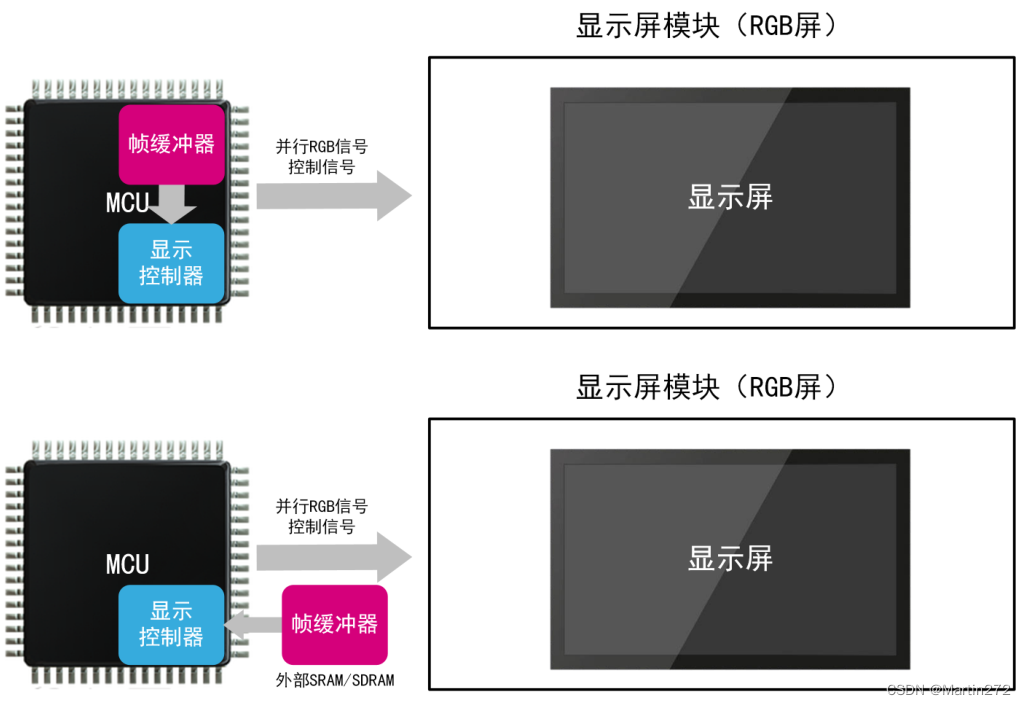
帧缓冲器和显示控制器,可以集成在MCU内部,也可以和显示屏做在一起。对于大部分中、低端MCU,不含显示控制器,内部SRAM也比较小,因此采用如图 4.1.9 所示的显示方案,将帧缓冲器、显示控制器和显示屏制作在一起,这样的屏幕习惯上称为“MCU屏”。
- 图 4.1.9 MCU 屏
对于部分高端MCU或MPU,本身含有显示控制器,使用内部SRAM或外部SRAM,如图4.1.10 所示,通过并行的RGB信号和控制信号直接控制显示屏,这样的屏幕习惯上称为“RGB屏”。
- 图 4.1.10 RGB 屏
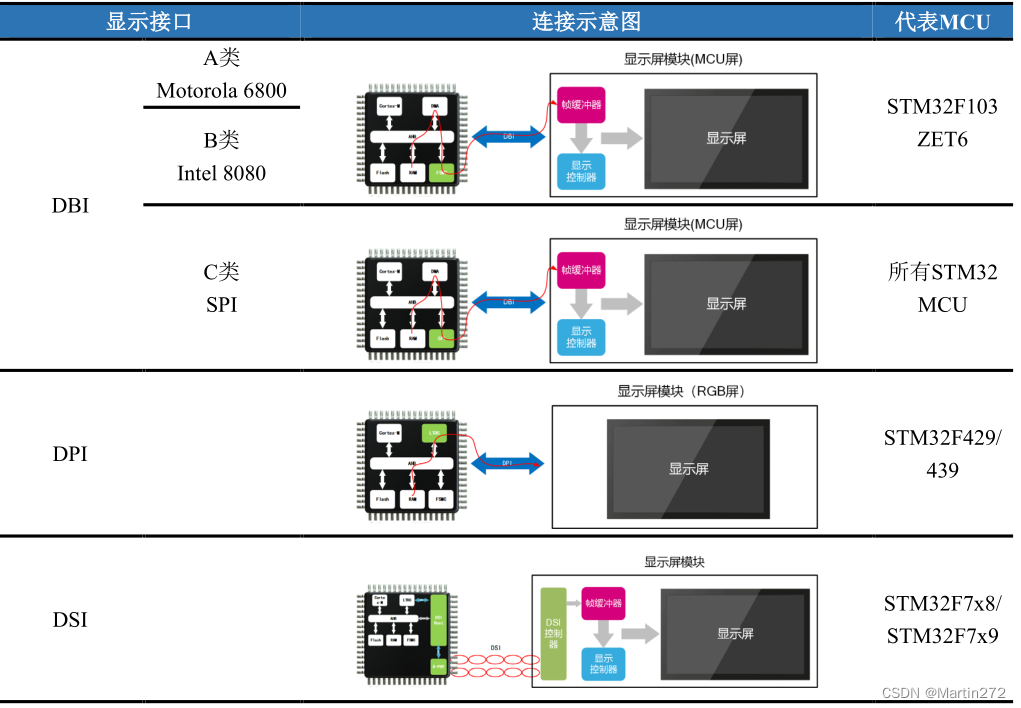
MIPI(Mobile Industry Processor Interface,移动行业处理器接口)是ARM、ST、TI等公司成立的一个联盟,致力于定义和推广移动设备接口的规范标准化,从而减小移动设备的设计复杂度。
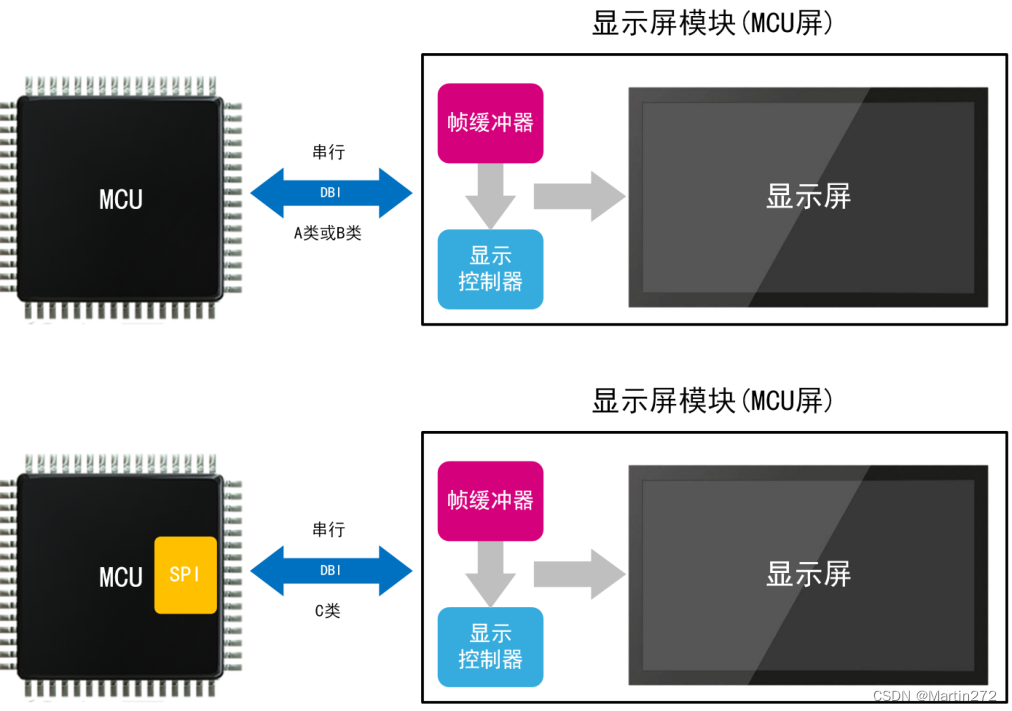
MIPI-DBI(Display Bus Interface,显示总线接口)是MIPI联盟发布的第一个显示标准,用来规定显示接口,MIPI-DBI中定义了三类接口:
- A类:基于Motorola 6800总线
- B类:基于Intel 8080总线
- C类:基于SPI协议
MIPI-DBI用于与MCU屏(带有显示控制器和帧缓冲器)进行连接,如图 4.1.11 所示。
- 图 4.1.11 MIPI-DBI 的 A 类、B 类(上)和 C 类接口(下)
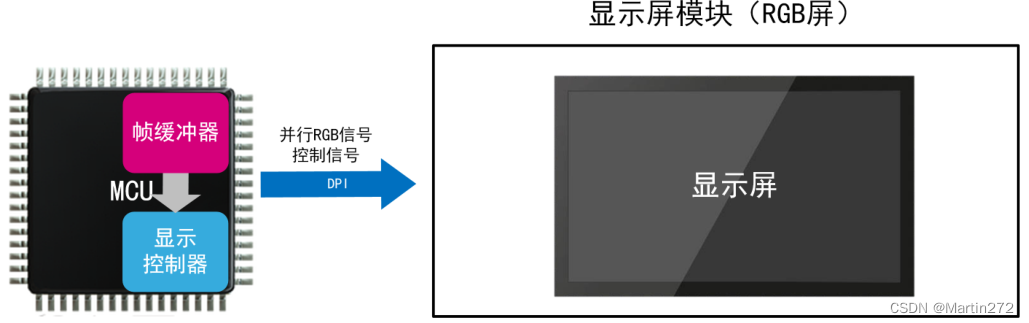
MIPI-DPI(Display Pixel Interface,显示像素接口),从名称就可以看出它是直接对屏幕的各像素点进行操作,利用H-SYNC(行同步信号)和V-SYNC(场同步信号)对各像素点进行颜色填充,类似CRT中电子枪那样扫描显示。MIPI-DPI用于与RGB屏(不含显示控制器和帧缓冲器)进行连接,如图 4.1.12 所示,像素数据需要实时流式传输到显示屏,对MCU性能有一定要求。
- 图 4.1.12 MIPI-DPI 接口
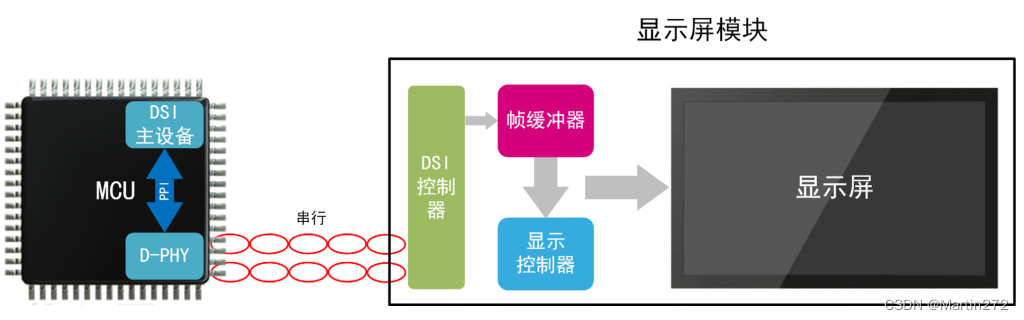
MIPI-DSI(Display Serial Interface,显示串行接口),从名称可以看出它是串行传输,不过传输信号是差分信号,实现了低噪声和低功耗。包含MIPI-DSI接口的MCU与显示屏的某连接如图 4.1.13 所示。DSI封装了DBI或DPI信号,并通过PPI协议将它其发送到D-PHY,通过差分信号传输到显示屏模块的DSI控制器解析。
- 图 4.1.13 MIPI-DSI 接口
对于STM32系列的MCU,不同型号对MIPI联盟显示接口的支持有所不同,总结如下,如表 4.1.3 所示。
-
所有STM32 MCU均支持MIPI-DBI C类接口(基于SPI协议);
-
带FSMC的所有STM32 MCU均支持MIPI-DBI A类和B类接口;
-
带LTDC的STM32 MCU支持MIPI-DPI接口;
-
带DSI Host的STM32 MCU支持MIPI-DSI接口;
-
表 38.1.3 STM32 MCU 支持的显示接口
4.1.3 显示屏控制器
STM32F103ZET6只有FSMC接口,没有LTDC或DSI Host,因此只能接MCU屏。
如图 4.1.14 所示,为图 4.1.14 本开发板配套 MCU 屏由屏幕供应商提供的《LCD_3.5寸_320x480_ILI9488_液晶显示模块规格书.pdf》可知,该液晶显示模块为TFT LCD,分辨率为320480,色彩深度为262K(RGB666),接口类型为16 Bit的MCU接口,驱动IC为ILI9488。由《ILI9488驱动芯片数据手册.pdf》可知,该芯片可以驱动320480分辨率,16.7M色彩深度的TFTLCD,同时该芯片内部自带GRAM。
由百问科技提供的《100ASK_LCD_3A5_V11原理图.pdf》可知,底板的主要功能是将LCD屏幕排线转接成所需排针,以便和开发板连接。同时提供背光控制电路和触摸电路,这些在后面用到再讲解。这里重点介绍下显示屏控制器ILI9488,它的框图如图 4.1.15 所示。
- 图 38.1.15 显示屏控制器 ILI9488 框图
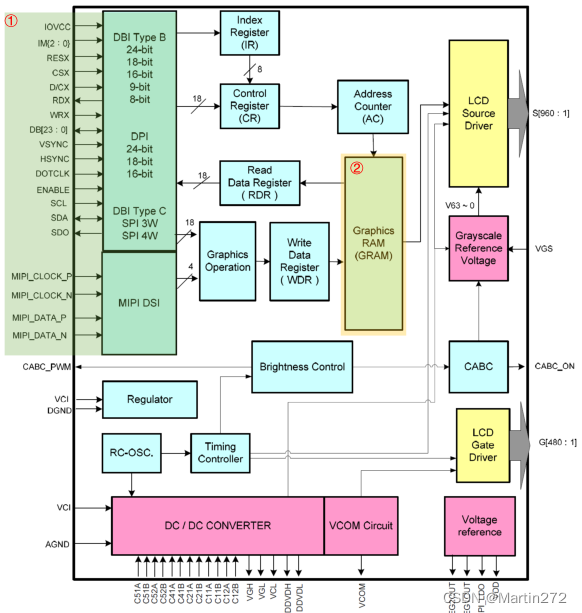
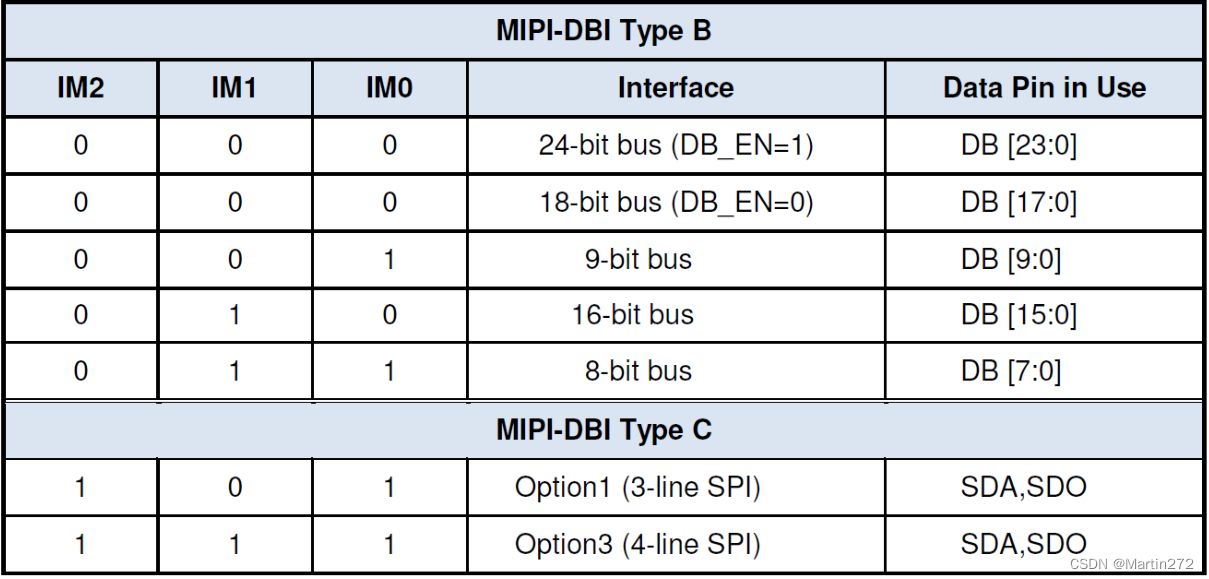
控制引脚IM[2:0]用于设置控制器的接口模式,如表 4.1.4 所示。显示屏支持的接口为16 Bit的MIPI-DBIB类,因此IM[2:0]值为010,该值由屏幕供应商生产时硬件设置,此时用到的数据引脚为DB[15:0]。
-
表 4.1.4 接口模式
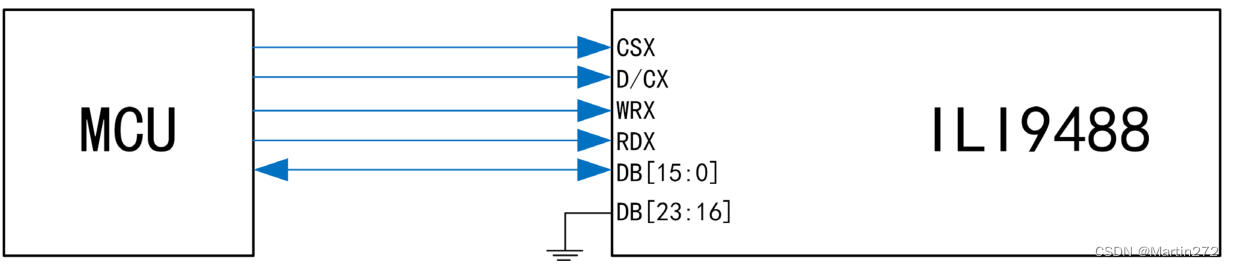
Intel 8080接口16位连接示意图,如图 4.1.16 所示。MCU和控制器之间,有4根控制信号,16个数据信号。CSX为片选信号,低电平有效(X表示低电平有效);D/CX为数据/命令切换信号,低电平时DB传输的为命令,高电平时DB传输的为数据;WRX为写信号,低电平有效;RDX为读信号,低电平有效;DB[15:0]为数据传输信号。 -
图 4.1.16 DBI-B 类接口 16 位连接示意图
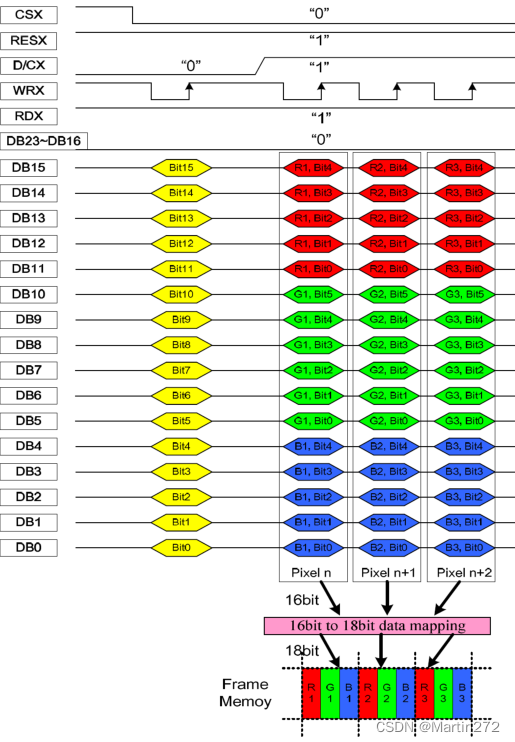
Intel 8080接口16位数据传输示意图,如图 4.1.17 所示。首先片选信号CS拉低,复位信号RES保持为高。数据/命令切换信号D/C拉低,写信号引脚拉低,此时DB[15:0]发送的就是指令(黄色部分);数据/命令切换信号D/C拉高,写信号引脚拉低,此时DB[15:0]发送的就是一个像素点的颜色数据(红、绿、蓝部分),其中低5位为蓝色数据、中6位为绿色数据、高5位为红色数据。
- 图 38.1.17 DBI-B 类接口 16 位数据传输时序图
再来分析一下FSMC接口,如何对应DBI-B类(Intel 8080)接口。对比前面“图 37.1.5 FSMC模式A读写时序”的时序和引脚,可以发现两者几乎吻合,如表 4.1.5 所示。
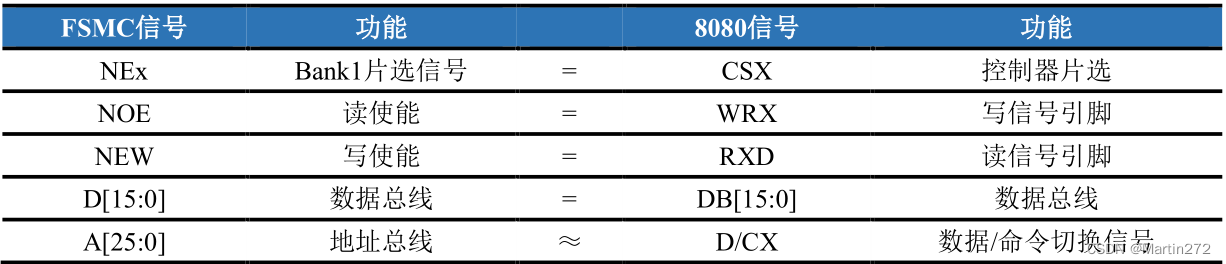
片选、读/写使能、数据总线都能对应,FSMC的地址总线和8080信号的数据/命令切换信号对应不上,如何让两者对应上呢?假设NEx为NE4,即片选的Bank1的第四区,此时FSMC的寻址范围为0x6C000000~0x6FFF FFFF。假设A23与D/C连接,此时CPU访问(0x6C000000 + (1<<24) - 2))地址时,A23为低电平,对应D/C为命令信号;当CPU访问(0x6C000000 + (1<<24))地址时,A23为高电平,对应D/C为数据信号。通过这个方式,即可实现地址总线与D/C的对应。
4.2 硬件设计
LCD的硬件包含两部分,一部分是根据LCD屏幕设计的底板,一部分是开发板的LCD接口。
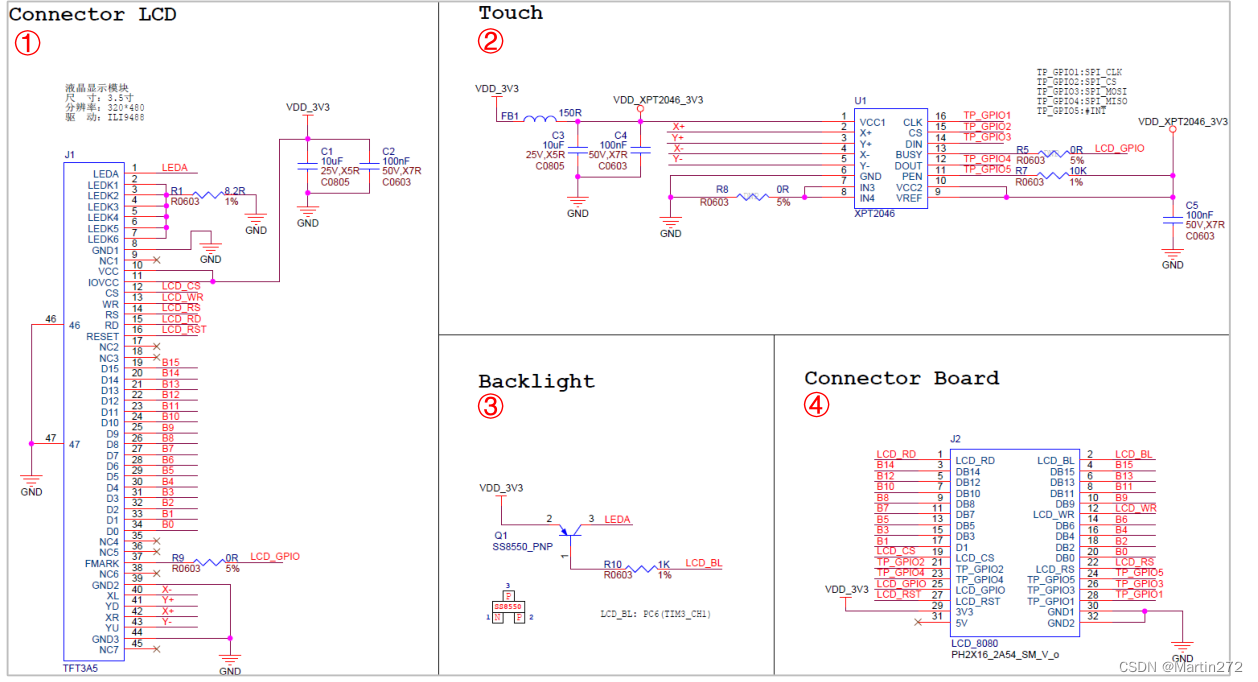
-
如图 4.2.1 所示,整个原理图由四部分组成。①是连接LCD屏幕的FPC排座,它的设计主要参考屏幕供应商提供的《LCD_3.5寸_320x480_ILI9488_液晶显示模块规格书.pdf》,里面详细介绍了这45个引脚的功能;②是触摸芯片电路,用于实现触摸功能,放在后面一章单独讲解;③是背光驱动电路,通过控制三极管的通断,实现背光的开关,需要注意的是,控制引脚支持PWM功能可以实现亮度的调节;④是连接开发板的排针接口,该接口与开发板的LCD接口一致。
-
图 38.2.1 LCD 底板原理图
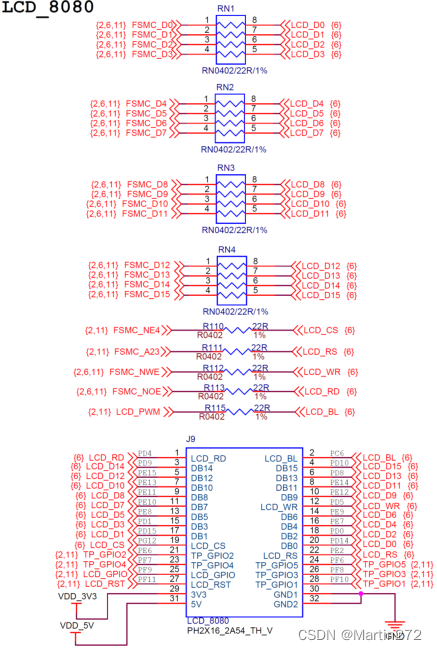
开发板LCD接口电路如图4.2.2 所示,RNx是排阻,可以等效看成四个独立并联的电阻。J9是与LCD底板连接的排母接口。
- 图 4.2.2 开发板 LCD 电路
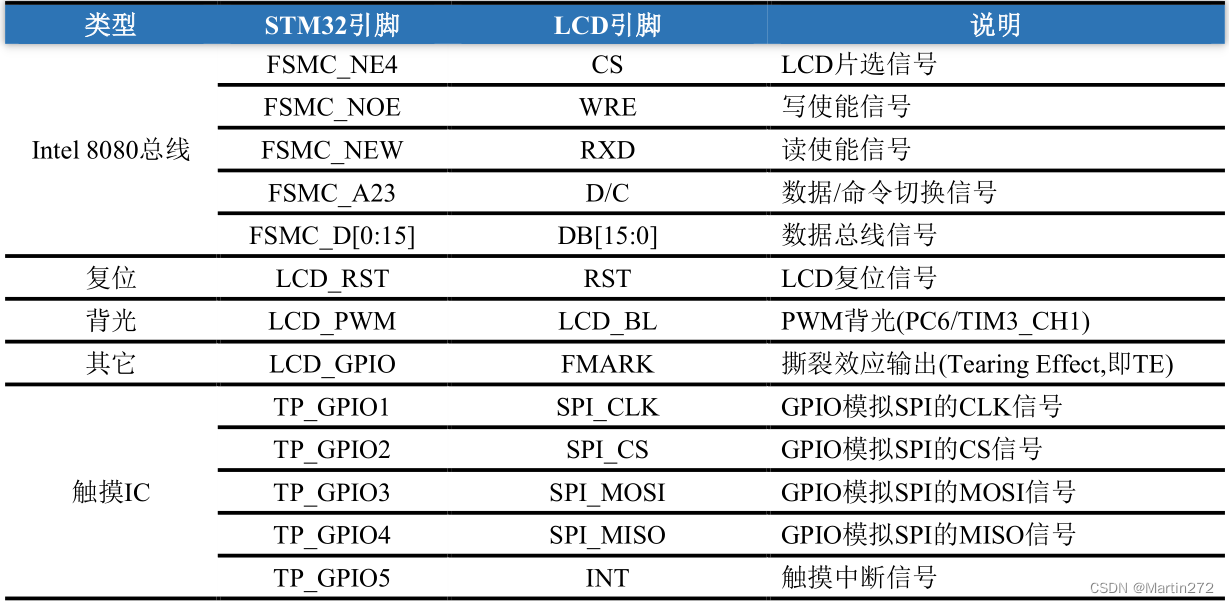
STM32使用FSMC接口实现LCD的Intel 8080总线接口,以及使用GPIO控制LCD其它功能,两者引脚的对应关系,如表 4.2.1 所示。
- 表 38.2.1 LCD 引脚对应
4.3 软件 设计
4.3.1 软件设计思路
实验目的:本实验通过STM32的FSMC接口操作LCD,在LCD上显示字符和简单图形。
- 初始化定时器、PWM输出控制背光;
- 初始化FSMC接口;
- 初始化LCD控制器,LCD设置;
- 实现LCD像素点显示、字符显示、数字显示、画线等功能;
- 主函数编写控制逻辑:清屏,使用LCD提供的函数,在指定位置显示字符、字符串、数字、图形等;
4.3.2 软件设计讲解
- 初始化定时器
这里定时器主要有两个作用,第一个是实现us延时用于LCD控制延时,第二个是实现PWM输出用于LCD背光亮度。us延时使用的TIM2,实现原理参考前面“第25章 定时器—us延时”,如代码段 4.3.1 所示。
代码段 38.3.1 定时器实现 us 延时(driver_timer.c)
/*
* 函数名:void TimerInit(void)
* 输入参数:
* 输出参数:无
* 返回值:无
* 函数作用:初始化定时器
*/
void TimerInit(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
// 定时器基本功能配置
htim.Instance = TIM2; // 使用定时器 2
htim.Init.Prescaler = 72-1; // 预分频系数 PSC=72-1(范围:0~0xFFFF)
// 72MHz 经过 72 分频后,定时器时钟为 1MHz,即定时器计数 1 次的时间,刚好为 1us
htim.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数
htim.Init.Period = 0; // 自动装载器 ARR 的值(范围:0~0xFFFF)
htim.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // 时钟分频(与输入采样相关)
//htim.Init.RepetitionCounter = 0; // 重复计数器值,仅存在于高级定时器
htim.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; // 不自动重新装载
if (HAL_TIM_Base_Init(&htim) != HAL_OK)
{
Error_Handler();
}
// 定时器时钟源选择
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; // 选用内部时钟作为定时器时钟源
if (HAL_TIM_ConfigClockSource(&htim, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
}
/*
* 函数名:void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
* 输入参数:htim-TIM 句柄
* 输出参数:无
* 返回值:无
* 函数作用:使能 TIM 时钟
*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2)
{
__HAL_RCC_TIM2_CLK_ENABLE(); // 使能 TIM2 的时钟
}
}
/*
* 函数名:void us_timer_delay(uint16_t t)
* 输入参数:t-延时时间 us 范围-0~65535us
* 输出参数:无
* 返回值:无
* 函数作用:定时器实现的延时函数,延时时间为 t us,为了缩短时间,函数体使用寄存器操作
*/
void us_timer_delay(uint16_t t)
{
uint16_t counter = 0;
__HAL_TIM_SET_AUTORELOAD(&htim, t); // 设置定时器自动加载值
__HAL_TIM_SET_COUNTER(&htim, counter); // 设置定时器初始值
HAL_TIM_Base_Start(&htim); // 启动定时器
while(counter != t) // 直到定时器计数从 0 计数到 t 结束循环,刚好 t us
{
counter = __HAL_TIM_GET_COUNTER(&htim); // 获取定时器当前计数
}
HAL_TIM_Base_Stop(&htim); // 停止定时器
}
由原理图可知,使用的PC6连接LCD的背光控制电路,PC6可重映射为TIM3_CH1,如代码段 4.3.2 所示。
代码段 38.3.2 定时器实现 PWM 输出(driver_timer.c)
/*
* 函数名:void TimerPWMInit(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:初始化定时器,输出频率 1Hz,占空比 50%的 PWMN 波
*/
void TimerPWMInit(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig;
TIM_OC_InitTypeDef sConfig;
// 定时器基本功能配置
hpwm.Instance = TIMx; // 指定定时器 TIM3
hpwm.Init.Prescaler = TIM_PRESCALER; // 预分频系数 PSC=360-1
hpwm.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数
hpwm.Init.Period = TIM_PERIOD; // 自动装载器 ARR 的值,ARR=2000-1
// 72MHz 经过 360 分频后,定时器时钟为 200KHz,即计数器每间隔 5us 计数一次,从 0 计数到 ARR,经历 10ms
hpwm.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // 定时器时钟不从 HCLK 分频
//hpwm.Init.RepetitionCounter = 0; // 重复计数器值,仅存在于高级定时器
hpwm.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; // 不自动重新装载
// 将 TIM3 按 PWM 模式初始化
if (HAL_TIM_PWM_Init(&hpwm) != HAL_OK)
{
Error_Handler();
}
// 定时器时钟源选择
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; // 选用内部时钟作为定时器时钟源
HAL_TIM_ConfigClockSource(&hpwm, &sClockSourceConfig);
// 配置 PWM 的输出通道参数
sConfig.OCMode = TIM_OCMODE_PWM1; // PWM 输出的两种模式:PWM1 当极性为低,CCR<CNT,输出低电平,反之高
电平
sConfig.OCPolarity = TIM_OCPOLARITY_LOW; // 设置极性为低
sConfig.OCFastMode = TIM_OCFAST_DISABLE; // 输出比较快速使能禁止(仅在 PWM1 和 PWM2 可设置)
sConfig.Pulse = LCD_BRT; // 在 PWM1 模式下,通道 1(LCD_PWM)占空比
if (HAL_TIM_PWM_ConfigChannel(&hpwm, &sConfig, TIM_LCD_PWM_CHANNEL) != HAL_OK)
{
Error_Handler();
}
}
/*
* 函数名:void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
* 输入参数:htim-TIM 句柄
* 输出参数:无
* 返回值:无
* 函数作用:HAL_TIM_PWM_Init 回调硬件初始化
*/
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_PWM_CLK_EN(); // PWM 所涉及的 TIM3 时钟使能
TIM_PWM_GPIO_CLK_EN(); // PWM 所涉及的 GPIOC 时钟使能
__HAL_RCC_AFIO_CLK_ENABLE(); // 重映射涉及时钟使能
//__HAL_AFIO_REMAP_TIM3_PARTIAL(); // 启用 TIM3 重映射
__HAL_AFIO_REMAP_TIM3_ENABLE();
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 复用推挽输出
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Pin = TIM_LCD_PWM_PIN;
HAL_GPIO_Init(TIM_LCD_PWM_PORT, &GPIO_InitStruct); // 初始化 LCD_PWM 引脚
HAL_NVIC_SetPriority(TIMx_IRQn, 0, 0); // 配置定时器中断优先级
HAL_NVIC_EnableIRQ(TIMx_IRQn); // 使能 TIM3 中断
}
/*
* 函数名:void TIM3_IRQHandler(void)
* 输入参数:无
* 输出参数:无
* 返回值:无
* 函数作用:TIM3 中断的中断处理函数
*/
void TIM3_IRQHandler(void)
{
HAL_TIM_IRQHandler(&hpwm);
}
/*
* 函数名:void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
* 输入参数:htim-TIM 句柄
* 输出参数:无
* 返回值:无
* 函数作用:TIM 中断回调周期更新函数
*/
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIMx)
{
__HAL_TIM_SET_COMPARE(&hpwm, TIM_LCD_PWM_CHANNEL, lcd_brt *20);
}
}
需要注意的61行使能重映射,只有在全部重映射时,PC6才能重映射为TIM3_CH1功能,因此需要使用“__HAL_AFIO_REMAP_TIM3_ENABLE()”函数使能。
TIM3的计数器CNT从0开始计数到CCR,输出低电平,LCD背光亮,然后计数器CNT从CCR到ARR,输出高电平,LCD灭。即,CCR值越小,占空比越大,背光越暗,CCR值越大,占空比小,背光越亮,CCR值与亮度成正比。CCR的计数范围为0~2000,因此在TIM3中断回调函数里,修改CCR值,即可改变PWM占空比,实现背光不同亮度。
- 初始化FSMC
FSMC的初始化,包含两部分:协议部分和硬件部分。
协议部分初始化如代码段4.3.3 所示。
代码段 4.3.3 FSMC 协议部分初始化(driver_fsmc.c)
static FSMC_NORSRAM_TimingTypeDef hfsmc_rw;
static SRAM_HandleTypeDef hsram;
void FSMC_LCD_Init(void)
{
hfsmc_rw.AddressSetupTime = 0x00; // 地址建立时间 ADDSET 范围:0~15 (模式 A 需要设置)
// hfsmc_rw.AddressHoldTime = 0x01; // 地址保持时间 ADDHLD 范围:1~15
hfsmc_rw.DataSetupTime = 0x02; // 数据建立时间 DATAST 范围:1~255 (模式 A 需要设置)
// hfsmc_rw.BusTurnAroundDuration = 0x00; // 总线恢复时间 BUSTURN 范围:0~15
// hfsmc_rw.CLKDivision = 0x00; // 时钟分频因子 CLKDIV 范围:2~16
// hfsmc_rw.DataLatency = 0x00; // 数据产生时间 ACCMOD 范围:2~17
hfsmc_rw.AccessMode = FSMC_ACCESS_MODE_A; // 模式 A
hsram.Instance = FSMC_NORSRAM_DEVICE; // 实例类型:NOR/SRAM 设备
hsram.Extended = FSMC_NORSRAM_EXTENDED_DEVICE;
hsram.Init.NSBank = FSMC_NORSRAM_BANK4; // 使用 NE4,对应 BANK1(NORSRAM)的区域 4
hsram.Init.DataAddressMux = FSMC_DATA_ADDRESS_MUX_DISABLE; // 地址/数据线不复用(nonmultiplexed)
hsram.Init.MemoryType = FSMC_MEMORY_TYPE_SRAM; // 存储器类型:SRAM
hsram.Init.MemoryDataWidth = FSMC_NORSRAM_MEM_BUS_WIDTH_16; // 选择 16 位数据宽度(所接 LCD 为 16 位数据宽度)
// hsram.Init.BurstAccessMode = FSMC_BURST_ACCESS_MODE_DISABLE; // 是否使能突发访问,仅对同步突发存储器有效,此处未用到
// hsram.Init.WaitSignalPolarity = FSMC_WAIT_SIGNAL_POLARITY_LOW; // 等待信号的极性,适用于突发模式访问,此处未用到
// hsram.Init.WaitSignalActive = FSMC_WAIT_TIMING_BEFORE_WS; // 存储器是在等待周期之前的一个时钟周期还是等待周期期间使能 NWAIT,适用于突发模式访问,此处未用到
hsram.Init.WriteOperation = FSMC_WRITE_OPERATION_ENABLE; // 写使能
// hsram.Init.WaitSignal = FSMC_WAIT_SIGNAL_DISABLE; // 等待使能位,适用于突发模式访问,此处未用到
hsram.Init.ExtendedMode = FSMC_EXTENDED_MODE_ENABLE; // 启用扩展模式,使用模式 A
// hsram.Init.AsynchronousWait = FSMC_ASYNCHRONOUS_WAIT_DISABLE; // 是否使能异步传输模式下的等待信号,此处未用到
// hsram.Init.WriteBurst = FSMC_WRITE_BURST_DISABLE; // 禁止突发写,适用于突发模式访问,此处未用到
if(HAL_SRAM_Init(&hsram, &hfsmc_rw, &hfsmc_rw) != HAL_OK)
{
Error_Handler();
}
}
-
6~12行:定义NOR/SRAM时序参数;外接设备为Intel 8080接口的LCD,可以看作SRAM设备,可以使用模式1或模式A,在后面使能了扩展模式,因此这里只能使用模式A;使用模式A需要设置地址建立时间(ADDSET)和数据建立时间(DATAST)两个时序参数;
-
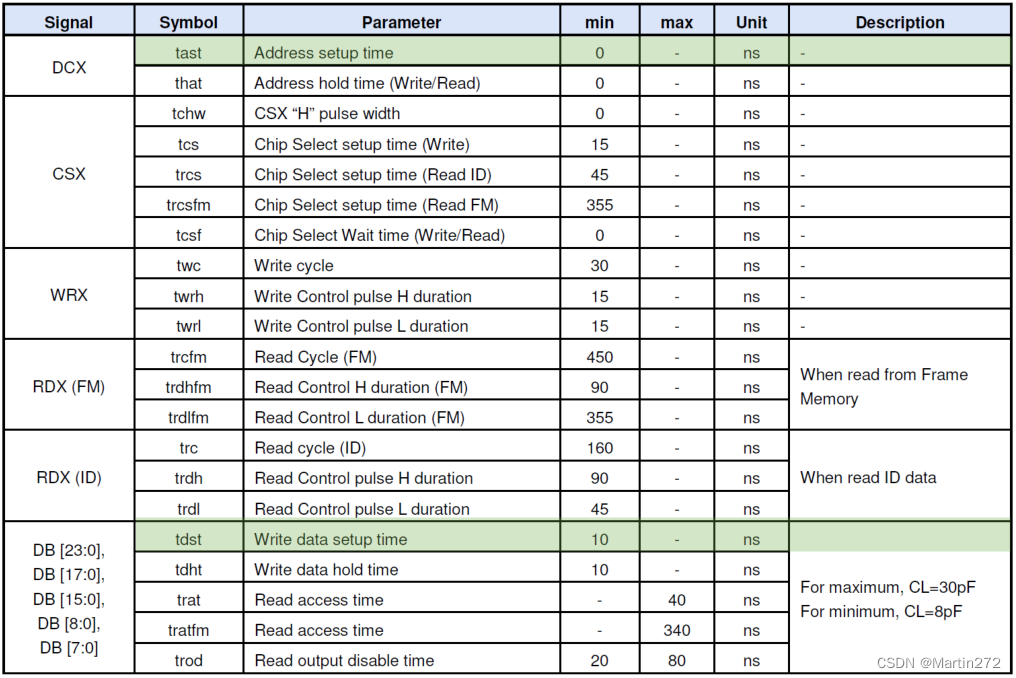
6行:设置地址建立时间,取值范围为0~15个T HCLK 。由ILI9488驱动芯片手册可知,DBI B类的地址建立时间如图 4.3.1 所示,地址建立时间t ast 大于0即可,因此这里设置AddressSetupTime值为0;
-
8行:设置数据建立时间,取值范围为1~255个T HCLK ,由ILI9488驱动芯片手册可知,如图 4.3.1 所示,数据建立时间t dst 需要大于10ns,当系统时钟为72MHz,HCLK也为72MHz,T HCLK =1/72us=13.8ns,只要1个T HCLK 就能大于t dst ,这里设置DataSetupTime值为2;
-
图 38.3.1 时序特性
-
12行:设置FSMC的访问模式为模式A;
-
14~30行:定义LCD(类似SRAM)属性;
- 14~15行:设置实例类型为NOR/SRAM设备;
- 16行:硬件上使用的FSMC_NE4连接的SRAM,因此对应BANK1(NORSRAM)的区域4;
- 17行:地址/数据线不复用(nonmultiplexed);
- 18行:设置存储器类型为SRAM;
- 19行:设置16位数据宽度(所接LCD为16为数据宽度);
- 26行:写使能;
- 28行:启用扩展模式,这样才能使用前面设置的模式A;
-
32~35行:使用HAL库提供的“HAL_SRAM_Init()”函数,将前面设置的NOR/SRAM时序参数和定义的属性初始化;
“HAL_SRAM_Init()”初始化函数会调用“HAL_SRAM_MspInit()”函数初始化硬件,FSMC相关的硬
件初始化如代码段 4.3.4 所示。
代码段 4.3.4 FSMC 硬件部分初始化(driver_fsmc.c)
void HAL_SRAM_MspInit(SRAM_HandleTypeDef *hsram)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_FSMC_CLK_ENABLE(); // 使能 FSMC 时钟
__HAL_RCC_GPIOC_CLK_ENABLE(); // 使能 GPIO 端口 C 时钟
__HAL_RCC_GPIOD_CLK_ENABLE(); // 使能 GPIO 端口 D 时钟
__HAL_RCC_GPIOE_CLK_ENABLE(); // 使能 GPIO 端口 E 时钟
__HAL_RCC_GPIOF_CLK_ENABLE(); // 使能 GPIO 端口 F 时钟
__HAL_RCC_GPIOG_CLK_ENABLE(); // 使能 GPIO 端口 G 时钟
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 配置为推挽输出功能
GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 引脚翻转速率快
GPIO_InitStruct.Pin = LCD_RST_PIN;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct); // 按上面参数配置 LCD_RST 引脚
(PF11)
GPIO_InitStruct.Pin = LCD_CS_PIN;
HAL_GPIO_Init(GPIOG, &GPIO_InitStruct); // 按上面参数配置 LCD_CS 引脚(PG12)
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 配置为复用推挽功能
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 引脚翻转速率快
// PDx
GPIO_InitStruct.Pin = LCD_GPIOD_PIN;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct); // 按上面参数配置 D 组涉及的 GPIO
// PEx
GPIO_InitStruct.Pin = LCD_GPIOE_PIN;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct); // 按上面参数配置 E 组涉及的 GPIO
}
- 初始化LCD 控制器
接着是使用初始化后的FSMC接口,访问LCD控制器ILI9488。前面提到可以使用FSMC的任意地址线模拟Intel 8080接口的数据/命令切换信号。硬件上使用的FSMC_A23与D/C引脚相连,因此在访问“0x6D000000-2”地址时,FSMC_A23为低,对应命令信号,在访问“0x6D000000”地址时,FSMC_A23为高,对应数据信号。
如代码段 4.3.5 所示,定义“_lcd”结构体,里面有两个成员,每个成员为无符号16位数据类型。
代码段 4.3.5 LCD 结构体定义(driver_lcd.h)
/* LCD 指令结构体,用于读写 LCD 数据和寄存器 */
typedef struct
{
__IO uint16_t reg; // 寄存器值
__IO uint16_t data; // 数据值
}_lcd;
随后定义结构体“_lcd”的地址为“0x6D000000-2”,则成员“reg”地址为“0x6D000000-2”,成员“data”
的地址为“0x6D000000”,以后访问这两个地址,就可以分别发送命令、数据内容,如代码段 4.3.6 所示。
代码段 4.3.6 访问 LCD 控制器(driver_lcd.c)
#define LCD ((__IO _lcd*)(0x6C000000 + (1<<24) - 2))
/********** LCD 读写函数定义 **********/
/* 函数名: void LCD_Write_Cmd(uint16_t _cmd)
* 输入参数:_cmd->要写入的指令
* 输出参数:无
* 返回值: 无
* 函数作用:往 LCD 写入指令
*/
void LCD_Write_Cmd(uint16_t _cmd)
{
LCD->reg = _cmd;
}
/* 函数名: void LCD_Write_Data(uint16_t _data)
* 输入参数:_data->要写入的数据
* 输出参数:无
* 函数作用:往 LCD 写入数据
*/
void LCD_Write_Data(uint16_t _data)
{
LCD->data = _data;
}
现在可以读写LCD的控制器ILI9488的寄存器了,需要根据ILI9488手册介绍的寄存器,依次进行配置。但ILI9488寄存器众多,依次配置效率不高,通常开发中,LCD屏幕厂商会提供初始化参考代码,用户直接使用即可。这里我们将厂商提供的初始化代码精简,提炼出几个重要的寄存器简单介绍一下,如代码段4.3.7 所示。
代码段 4.3.7 LCD 控制器初始化(driver_ili9488.c)
/* 函数名: static void ILI9488_RegConfig(void)
* 输入参数:无
* 输出参数:无
* 返回值: 无
* 函数作用:ILI9488 寄存器初始化
*/
static void ILI9488_RegConfig(void)
{
LCD_Write_Cmd(0x3A); // Interface Pixel Format
LCD_Write_Data(0x05); // DBI-16bit
LCD_Write_Cmd(0xB6); // Display Function Control
LCD_Write_Data(0x02); // RM:System interface
LCD_Write_Data(0x22); // SS:S960->S1 GS:G1->G480
LCD_Write_Data(0x3B); // NL
LCD_Write_Cmd(0x11); // Sleep OUT
LCD_Write_Data(0x00); // No parameter
LCD_Write_Cmd(0x29); // Display ON
LCD_Write_Data(0x00); // No parameter
}
-
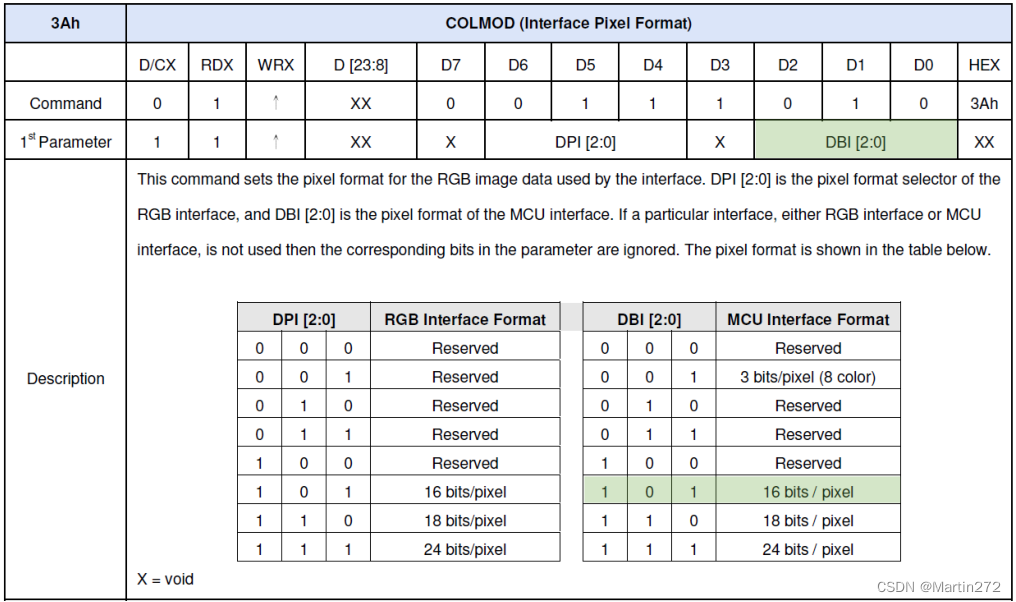
9~10行:设置LCD控制器的接口像素格式;如图 38.3.2 所示,使用DBI 16位接口时,D[2:0]需要设置为0x5;
-
图 38.3.2 LCD 控制器(Interface Pixel Format 寄存器)
-
12~15行:设置通过何种接口访问GRAM,LCD源极的驱动方向等;鉴于篇幅,这里就不展开挨个介绍,读者可以自行参考手册里该寄存器的每一位;
-
17~18行:退出休眠,发送指令后,发送一个空数据占位;
-
20~21行:启动显示,发送指令后,发送一个空数据占位;
正看本开发板的屏幕时,长小于宽,属于竖排显示,通过设置Memory Access Control(0x36)控制器,实现LCD的显示方向,如代码段 4.3.8 所示。
代码段 4.3.8 设置 LCD 显示方向(driver_lcd.c)
/* 函数名: void LCD_Scan_Dir(uint8_t _dir)
* 输入参数:_dir:方向选项 0~7
* 输出参数:无
* 返回值: 无
* 函数作用:设置 LCD 的方向
*/
void LCD_Scan_Dir(uint8_t _dir)
{
// bit[7] MY:Row Address Order
// bit[6] MX:Column Address Order
// bit[5] MV:Row/Column Exchange
// bit[3] BGR:RGB-BGR Order
_dir = (_dir<<5) | 0x08; // 获取高 3 位值,RGB to BGR
LCD_Write_Cmd(0x36); // Memory Access Control
LCD_Write_Data(_dir); //根据 scan_mode 的值设置 LCD 方向,共 0-7 种模式
}
/* 函数名: void LCD_GRAM_Scan(uint8_t _opt)
* 输入参数:_opt:扫描方式 0~7
* 输出参数:无
* 返回值: 无
* 函数作用:设置 LCD 的扫描方式
*/
void LCD_GRAM_Scan(uint8_t _opt)
{
uint8_t tmp = _opt%2;
if(_opt > 7)
_opt = 0;
lcddev.setx_cmd = 0x2A; // Column Address Set
lcddev.sety_cmd = 0x2B; // Page Address Set
lcddev.gram_cmd = 0x2C; // Memory Write
lcddev.scan_mode = _opt; // 记录扫描模式以便之后判断屏幕方向
if(tmp == 0) // 0 2 4 6 竖屏
{
if(lcddev.dev_id == 0x9488)
{
lcddev.hor_res = 320;
lcddev.ver_res = 480;
}
}
else if(tmp == 1) // 1 3 5 7 横屏
{
if(lcddev.dev_id == 0x9488)
{
lcddev.hor_res = 480;
lcddev.ver_res = 320;
}
}
LCD_Scan_Dir(lcddev.scan_mode);
}
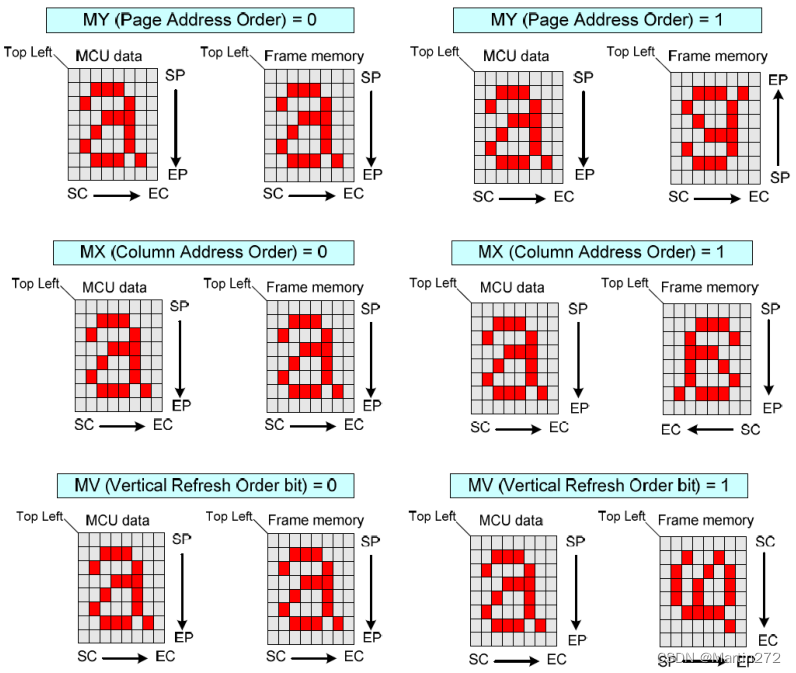
Memory Access Control寄存器的Bit[7:5]三位一起控制内存的读写方向。MY(Bit[7])控制行地址顺序,MX(Bit[6])控制列地址顺序,MV(Bit[5])控制行列交换,如图 4.3.3 所示。
- 图 38.3.3 LCD 方向控制
- LCD 显示功能函数
LCD正常工作后,接下来需要实现一些常用的功能函数,比如清屏、显示字符、字符串、数字变量、画线、填充等功能。
清屏功能的实现比较简单,先设置要填充的区域,然后向GRAM写入要填充的颜色即可,如代码段
4.3.9 所示。
代码段 4.3.9 LCD 清屏函数实现(driver_lcd.c)
/* 函数名: void LCD_SetCursor(uint16_t x, uint16_t y)
* 输入参数:x:光标 x 坐标 y:光标 y 坐标
* 输出参数:无
* 返回值: 无
* 函数作用:设置光标位置
*/
void LCD_SetCursor(uint16_t x, uint16_t y)
{
LCD_Write_Cmd(lcddev.setx_cmd); // 设置 X 坐标指令
LCD_Write_Data(x>>8); // 开始地址高 8 位
LCD_Write_Data(x&0xFF); // 开始地址低 8 位
LCD_Write_Data((lcddev.hor_res-1)>>8); // 结束地址高 8 位
LCD_Write_Data((lcddev.hor_res-1)&0xFF); // 结束地址低 8 位
LCD_Write_Cmd(lcddev.sety_cmd); // 设置 Y 坐标指令
LCD_Write_Data(y>>8); // 开始地址高 8 位
LCD_Write_Data(y&0xFF); // 开始地址低 8 位
LCD_Write_Data((lcddev.ver_res-1)>>8); // 结束地址高 8 位
LCD_Write_Data((lcddev.ver_res-1)&0xFF); // 结束地址低 8 位
}
/* 函数名: void LCD_Clear(uint16_t _color)
* 输入参数:_color:颜色
* 输出参数:无
* 返回值: 无
* 函数作用:LCD 清屏
*/
void LCD_Clear(uint16_t _color)
{
uint32_t i = 0;
uint32_t totalpoint = lcddev.hor_res * lcddev.ver_res; // 像素点总数
lcd_color.backcolor = _color; // 设置背景颜色
LCD_SetCursor(0, 0); // 设置显示位置
LCD_Write_Cmd(lcddev.gram_cmd); // 写入 GRAM 的指令
for(i=0;i<totalpoint;i++) // 循环写像素颜色
{
LCD_Write_Data(lcd_color.backcolor);
}
}
- 9-13行:设置列地址;先设置列开始地址的高低8位,这里假设为0,然后设置列结束地址的高低8位,这里为320,也就是列地址范围为0~320;
- 15-19行:设置行地址;先设置行开始地址的高低8位,这里假设为0,然后设置行结束地址的高低8位,这里为480,也就是列地址范围为0~480;这样设置之后,显示窗口即为整个屏幕空间;
- 36~40行:向GRAM写入颜色数据,颜色数据将在前面设置的显示窗口显示;
接着实现在LCD上显示字符,这个稍微复杂一点,需要先实现在LCD上指定位置显示像素点,如代码段4.3.10 所示。
代码段 4.3.10 LCD 显示像素点(driver_lcd.c)
/* 函数名: void LCD_DrawPoint(uint16_t x, uint16_t y, uint16_t color)
* 输入参数:x,y:坐标 color:颜色
* 输出参数:无
* 返回值: 无
* 函数作用:LCD 描点
*/
void LCD_DrawPoint(uint16_t x, uint16_t y, uint16_t color)
{
LCD_Write_Cmd(lcddev.setx_cmd); // 设置 X 坐标指令
LCD_Write_Data(x>>8); // 开始地址高 8 位
LCD_Write_Data(x&0xFF); // 开始地址低 8 位
LCD_Write_Data((lcddev.hor_res-1)>>8); // 结束地址高 8 位
LCD_Write_Data((lcddev.hor_res-1)&0xFF); // 结束地址低 8 位
LCD_Write_Cmd(lcddev.sety_cmd); // 设置 Y 坐标指令
LCD_Write_Data(y>>8); // 开始地址高 8 位
LCD_Write_Data(y&0xFF); // 开始地址低 8 位
LCD_Write_Data((lcddev.ver_res-1)>>8); // 结束地址高 8 位
LCD_Write_Data((lcddev.ver_res-1)&0xFF); // 结束地址低 8 位
LCD_Write_Cmd(lcddev.gram_cmd); // 写入 GRAM 的指令
LCD_Write_Data(color); // 写入颜色数据
}
- 9~19行:指定显示窗口位置;
- 21~22行:向GRAM写入一个颜色数据,因此只会在显示窗口的起始位置,显示指定的颜色;
接着实现在LCD上显示字符,这个稍微复杂一点,需要先准备ASCII字符表二维数组,每个字符由若干数据组成,定义在“font.h”里,字符显示的实现如代码段 4.3.11 所示。
代码段 4.3.11 LCD 显示字符(driver_lcd.c)
/* 函数名: void LCD_ShowChar(uint16_t x, uint16_t y, uint8_t num, uint8_t size, uint8_t mode)
* 输入参数:x,y:起始坐标 num:要显示的字符(" "--->"~") size:字体大小 12/16/24 mode: 是否叠加(1 叠加)
* 输出参数:无
* 返回值: 无
* 函数作用:在指定位置显示一个字符
*/
void LCD_ShowChar(uint16_t x, uint16_t y, uint8_t num, uint8_t size, uint8_t mode)
{
uint8_t data, t, t1;
uint16_t y0 = y;
uint8_t csize = (size/8+((size%8)?1:0))*(size/2); // 得到字体一个字符对应点阵集所占的字节数
num=num-' '; // 得到偏移后的值(ASCII 字库是从空格开始取模,所以-' '就是对应字符的字库)
for(t=0; t<csize; t++)
{
if(size==12)
data = asc2_1206[num][t]; //调用 1206 字体
else if(size==16)
data = asc2_1608[num][t]; //调用 1608 字体
else if(size==24)
data = asc2_2412[num][t]; //调用 2412 字体
else
return;
for(t1=0;t1<8;t1++)
{
if(data&0x80) // 依次画最高位像素点
LCD_DrawPoint(x, y, lcd_color.textcolor);
else if(mode==0)
LCD_DrawPoint(x, y, lcd_color.backcolor);
data <<= 1;
y++;
if(y>lcddev.ver_res) // 超出垂直显示区域
return;
if((y-y0)==size) // 一列画完
{
y = y0;
x++;
if(x>lcddev.hor_res) // 超出水平显示区域
return;
break;
}
}
}
}
- 11行:计算字体一个字符对应点阵集所占的字节数;
- 12行:得到字符在数组中的位置;
- 14行:循环把该字符所有的字节挨个处理;
- 16~23行:得到对应字库的对应字节;
- 25行:循环处理每个字节;
- 27~30行:取该字节最高位的数据,进行描点;
- 32行:更新最高字节内容;
- 33行:行数记录加1;
- 35~36行:当显示行数大于屏幕边界,退出;
- 38~45行:描完一列后,准备描下一列,更新相关标记;
接着实现字符串的显示,调用前面实现字符显示函数即可,注意显示边界,如代码段 4.3.12 所示。
代码段 4.3.12 LCD 显示字符串(driver_lcd.c)
/* 函数名: void LCD_ShowString(uint16_t x, uint16_t y, uint8_t size, uint8_t *p)
* 输入参数:x,y:起点坐标 size:字体大小 *p:字符串起始地址
* 输出参数:无
* 返回值: 无
* 函数作用:显示字符串
*/
void LCD_ShowString(uint16_t x, uint16_t y, uint8_t size, char *p)
{
while((*p<='~')&&(*p>=' ')) // 判断是不是非法字符
{
LCD_ShowChar(x, y, *p, size, 0); // 显示该字符
x+=size/2; // 字符位置水平偏移
p++; // 指向下一个字符
if(x>(lcddev.hor_res-size/2)) // 超出水平显示区域
{
x = 0;
y+=size;
}
if(y>(lcddev.ver_res-size)) // 超出垂直显示区域
break;
}
}
其它的显示函数就不一一列举了,读者可直接看源码分析实现过程。
- 主函数控制逻辑
在主函数里,依次初始化定时器、PWM、FSMC接口和LCD控制器。然后清屏,显示字符、字符串、数字、画线、填充矩形来验证LCD显示,如代码段 4.3.13 所示。
代码段 4.3.13 主函数逻辑控制(main.c)
printf("**********************************************\n\r");
printf("-->嘻嘻嘻:www.xxx.net\n\r");
printf("-->LCD 显示实验\n\r");
printf("**********************************************\n\r");
TimerInit(); // 定时器初始化
TimerPWMInit(); // PWM 初始化
FSMC_LCD_Init(); // FSMC 接口初始化
LCD_Init(); // LCD 初始化
LCD_Clear(WHITE); // 清屏为白色
LCD_ShowChar(0, 0, 'A', 24, 0); // 显示字符
LCD_SetColor(BLACK, WHITE); // 设置字符串颜色和背景色,显示字符串
LCD_ShowString(0, 24, 24, "www.100ask.net");
LCD_SetColor(WHITE, RED); // 设置字符串颜色和背景色,显示数字
LCD_ShowNum(0, 48, 123456789, 24);
LCD_DrawLine(160, 120, 70, 310, BLUE); // 画线显示三角形
LCD_DrawLine(70, 310, 250, 310, BLUE);
LCD_DrawLine(250, 310, 160, 120, BLUE);
LCD_Color_Fill(110,311, 210,411, GREEN); // 填充矩形
while(1);

















 7145
7145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









