






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
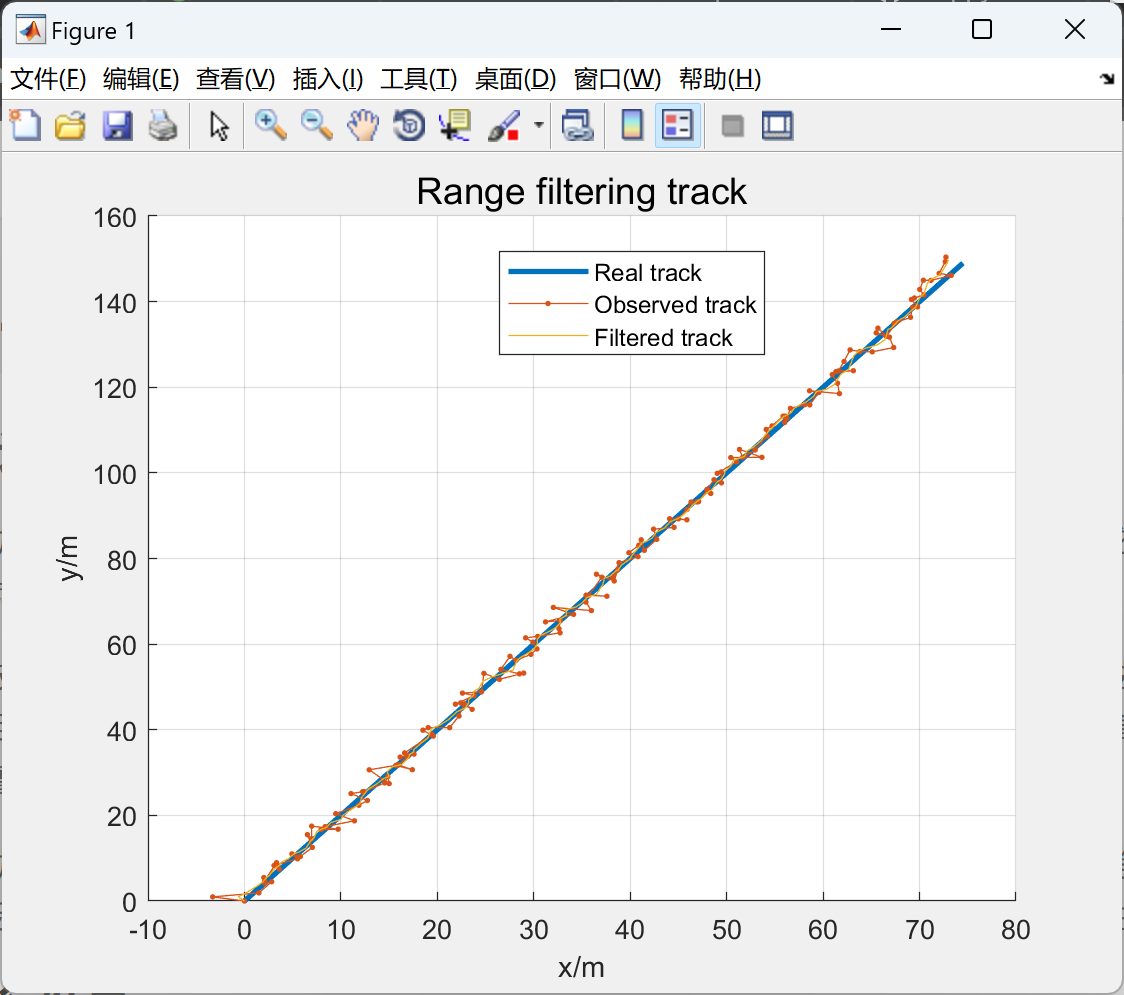
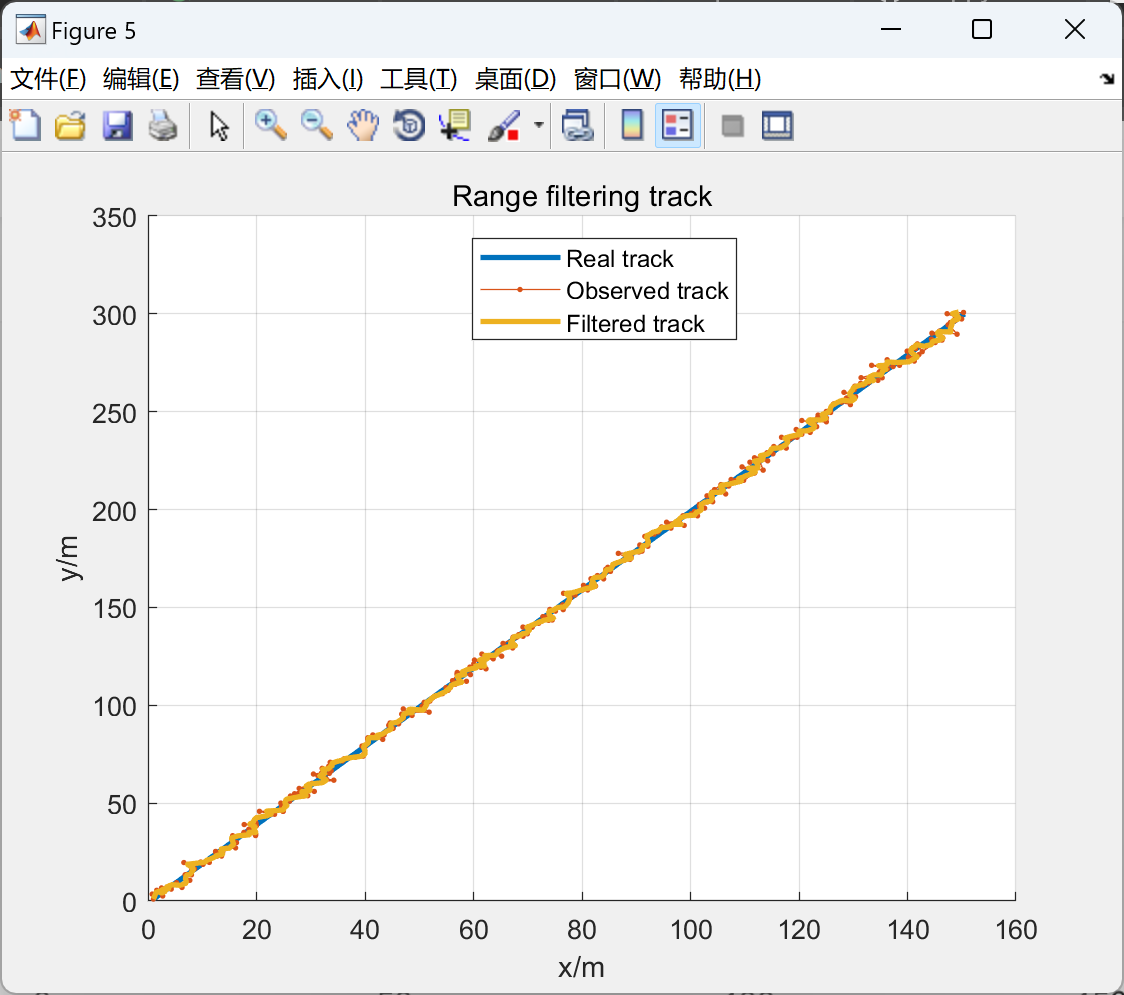
距离滤波轨迹估计是一种用于估计目标位置的方法,其基本思想是通过测量目标与传感器之间的距离,利用滤波算法来修正目标的位置估计,从而提高目标追踪的精度和稳定性。
在距离滤波轨迹估计研究中,常用的滤波算法包括卡尔曼滤波器、粒子滤波器等。这些算法通过不断地更新目标的位置估计值,可以有效地降低测量误差和环境干扰对目标追踪的影响,提高追踪的准确性和鲁棒性。
距离滤波轨迹估计研究的应用范围广泛,包括无人机导航、车辆自动驾驶、智能交通系统等领域。通过对目标位置的准确估计,可以实现更高效的目标追踪和控制,提高系统的性能和可靠性。
卡尔曼滤波是一种常用于状态估计的算法,特别适用于动态系统中的时间序列数据。在轨迹估计中,卡尔曼滤波可以帮助我们估计目标的位置和速度等状态变量,从而实现对目标轨迹的跟踪和预测。
在基于卡尔曼滤波的轨迹估计研究中,我们首先需要建立目标运动模型,包括目标的运动方程和观测方程。然后利用这些模型,我们可以利用观测到的传感器数据来进行状态估计,不断更新目标的位置和速度等状态变量。
一般来说,卡尔曼滤波的具体步骤如下:
1. 初始化状态变量和协方差矩阵;
2. 预测下一个时刻的状态和协方差;
3. 利用观测数据更新状态和协方差;
4. 循环执行上述步骤,实现对目标轨迹的持续估计和跟踪。
通过基于卡尔曼滤波的轨迹估计研究,我们可以更好地理解目标的运动规律,提高对目标轨迹的预测精度,并实现对移动目标的有效跟踪和监测。同时,结合其他技术如雷达、激光等传感器数据,可以进一步提升轨迹估计的精度和鲁棒性。因此,基于卡尔曼滤波的轨迹估计研究在无人驾驶、智能交通系统、机器人导航等领域具有重要的应用前景。
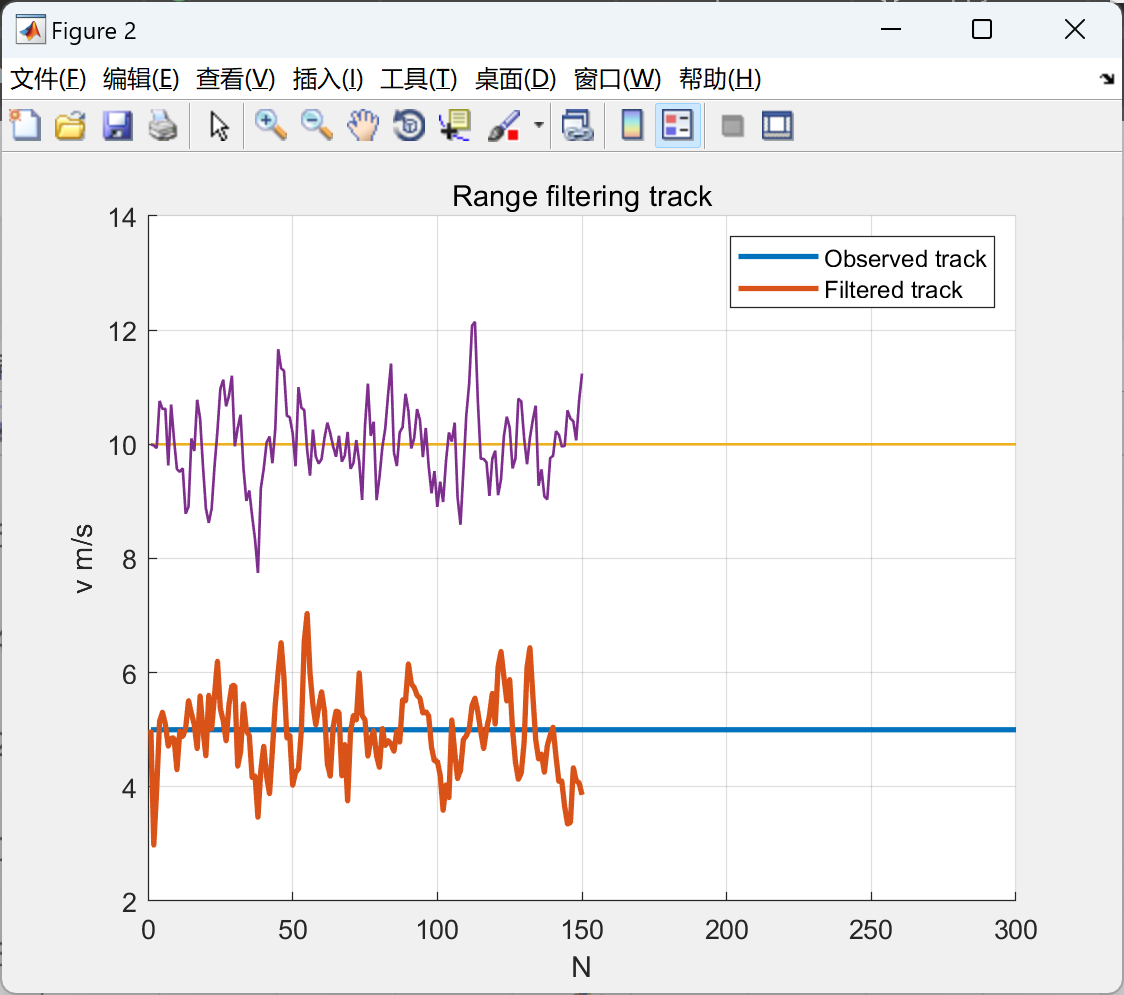
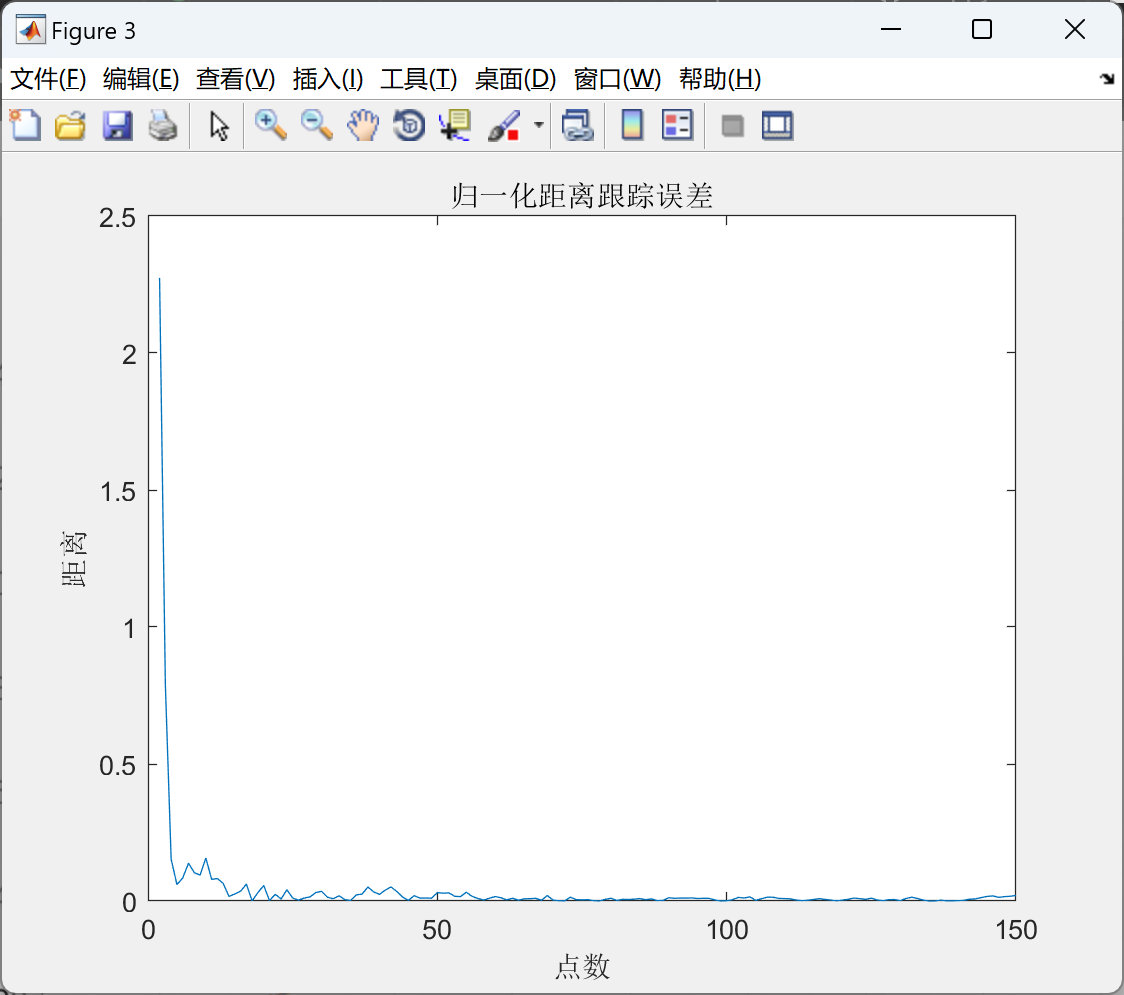
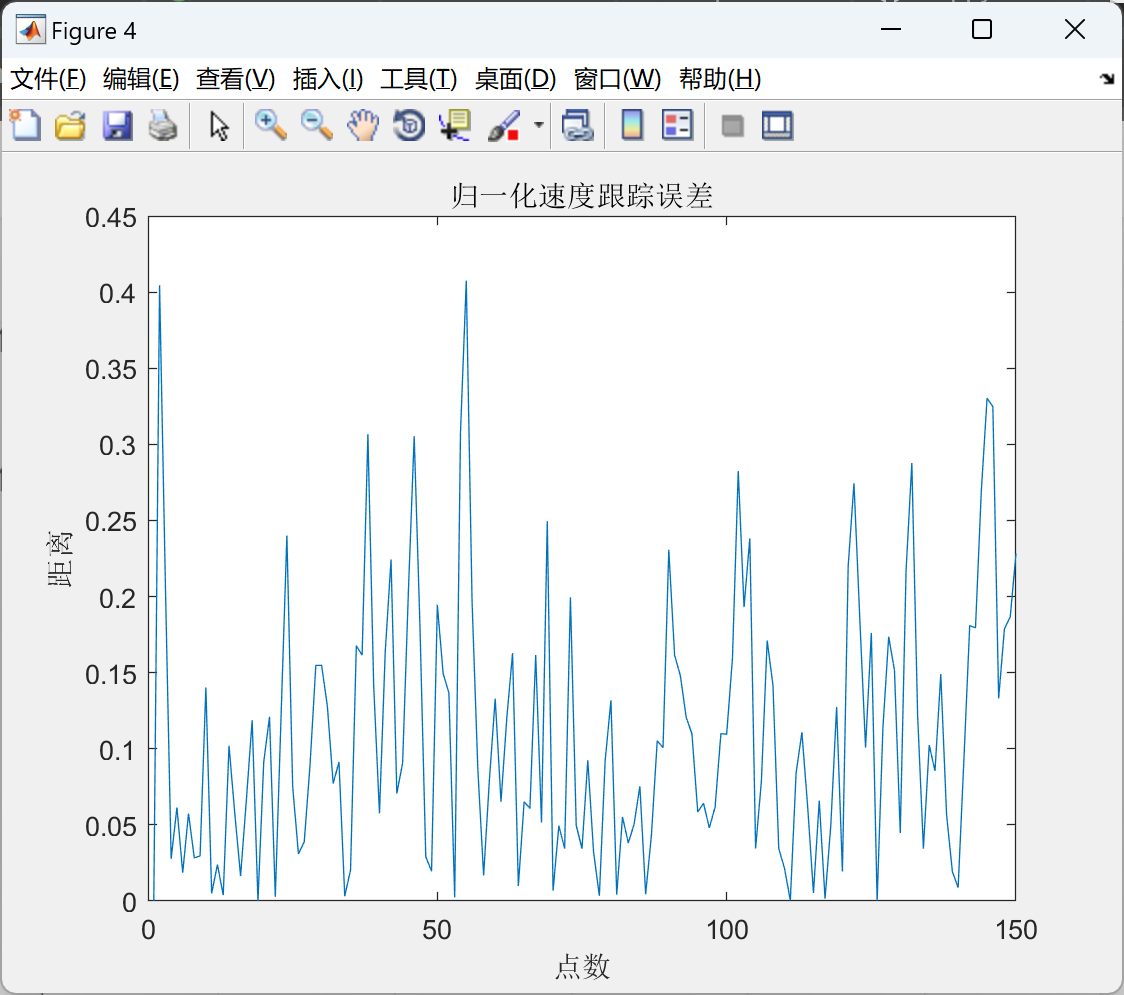
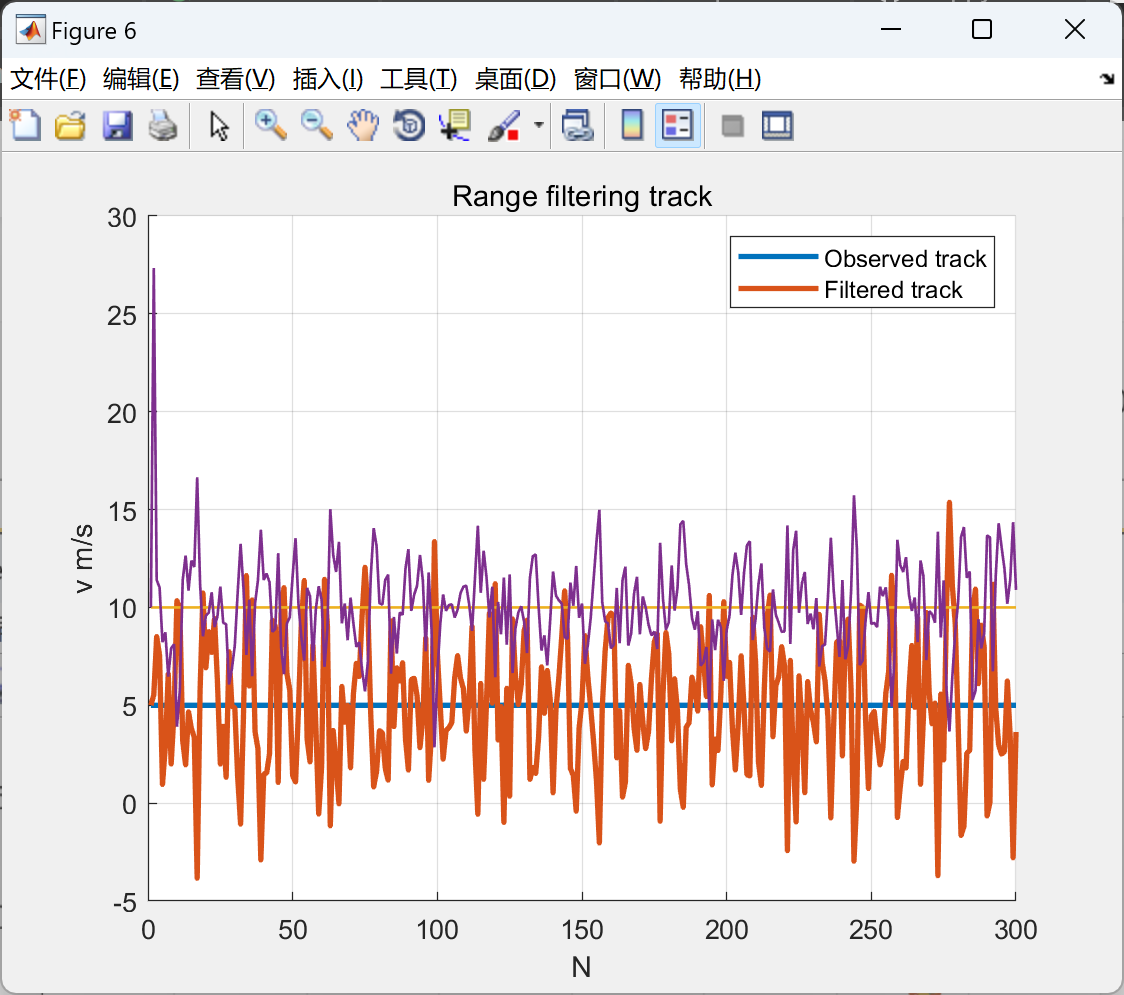
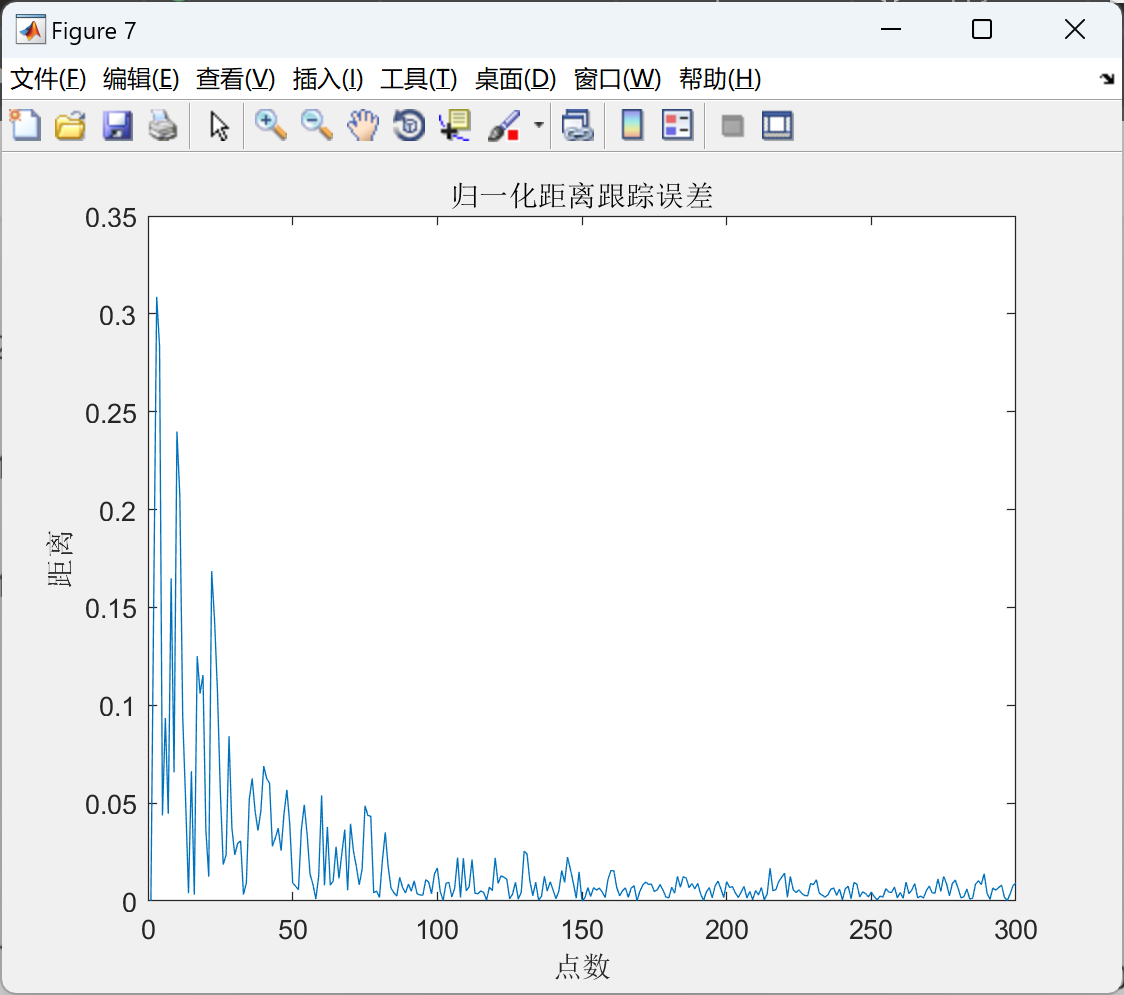
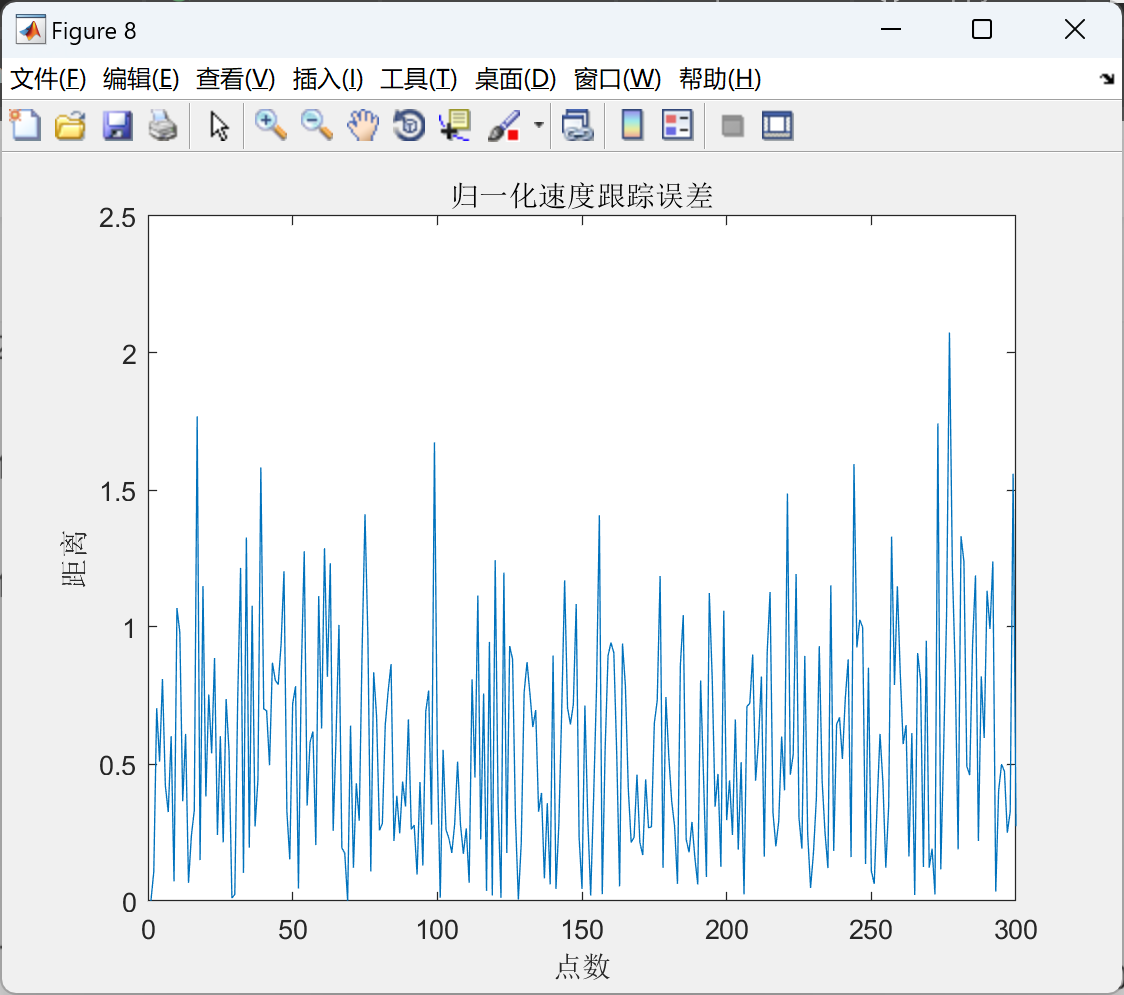
📚2 运行结果
部分代码:
%% Kalman filter 2D
T_total = 30; %Observation time s
T= 0.1; %Data rate = 0.1s
N = T_total/T;
%noise
sigma_x = 0.5; %过程噪声 / 状态噪声,此处为速度波动
sigma_z = 1; %距离量测噪声,高斯白
sigma_theta = 0.1; %方位角测量噪声
sigma_phi = 0.1; %俯仰角测量噪声误差
noise_x = [randn(1,N).*sigma_x;zeros(1,N);randn(1,N).*sigma_x; zeros(1,N)];
noise_z = randn(2,N).*sigma_z;
%initial data
X = zeros(4,N);
X_real = zeros(4,N);
Z = zeros(2,N);
X(:,1) = [1, 5, 1, 10];
X_real(:,1) = X(:,1);
Z(:,1) = [X(1,1),X(3,1)];
%初始化协方差矩阵,假设初始theta=60°根据速度角得出
theta0 = pi/3 ;
r = sqrt(X(1,1)^2+X(3,1)^2);
A = [cos(theta0) -r*sin(theta0); sin(theta0) r*cos(theta0)] ;
R = A*[sigma_z^2 0;0 sigma_theta^2]*A' ;%R是对称阵,为初始时刻量测噪声在直角坐标系下的协方差
%初始化协方差矩阵
P = [R(1,1) R(1,1)/T R(1,2) R(1,2)/T
R(1,1)/T 2*R(1,1)/T^2 R(1,2)/T 2*R(1,2)/T^2
R(1,2) R(1,2)/T R(2,2) R(2,2)/T
R(1,2)/T 2*R(1,2)/T^2 R(2,2)/T 2*R(2,2)/T^2 ];
%P = 100*eye(4);
%状态转移矩阵
F = [1 T 0 0
0 1 0 0
0 0 1 T
0 0 0 1];
%量测矩阵
H = [1 0 0 0
0 0 1 0];
%状态噪声协方差矩阵全都加在速度上
Q = [0 0 0 0
0 sigma_x 0 0
0 0 0 0
0 0 0 sigma_x ];
%量测噪声协方差矩阵
% R = [sigma_z 0
% 0 sigma_z ];
%过程噪声分布矩阵
B = [T^2/2 0
T 0
0 T^2/2
0 T];
v = [sigma_x sigma_x]';%分别是x和y方向的过程噪声向量
%过程噪声
V = B*v;
%观测噪声
W = 0;
%构造 真实轨迹X 与 观测轨迹Z
for n=2:N
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]李村.水面救援目标状态估计与跟踪控制方法研究[D].哈尔滨工程大学,2018.
[2]赵辉.有色噪声下卡尔曼滤波的状态估计算法研究[D].华北电力大学(北京) 华北电力大学[2024-04-26].DOI:CNKI:CDMD:2.2009.100679.
[3]邓胡滨,张磊,吴颖,等.基于卡尔曼滤波算法的轨迹估计研究[J].传感器与微系统, 2012, 31(5):4.DOI:10.3969/j.issn.1000-9787.2012.05.002.
[4]徐铁,蔡奉君,胡勤友,等.基于卡尔曼滤波算法船舶AIS轨迹估计研究[J].现代电子技术, 2014(5):97-100.DOI:10.3969/j.issn.1004-373X.2014.05.030.
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









