






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
使用卡尔曼滤波器跟踪目标轨迹是一种常见的技术,尤其在目标跟踪、机器人导航和自动驾驶等领域中应用广泛。卡尔曼滤波器通过融合传感器测量值和系统模型的预测值,能够估计出目标的状态,并提供更准确的轨迹预测。
卡尔曼滤波器的基本原理是通过递归地更新状态估计和协方差矩阵,利用先验信息和测量更新状态估计值。在目标跟踪中,状态通常包括位置、速度等信息。通过不断地与传感器测量值进行比较和调整,卡尔曼滤波器可以有效地跟踪目标的运动轨迹。
比较滤波器输出和原始轨迹是评估卡尔曼滤波器性能的重要步骤之一。通常情况下,可以通过以下步骤进行比较:
1. **数据准备**:收集原始轨迹数据和传感器测量数据。确保两者的时间戳一致,并对数据进行预处理,如去除噪声或异常值。
2. **应用卡尔曼滤波器**:使用卡尔曼滤波器对传感器测量数据进行处理,得到滤波器输出的目标轨迹估计值。
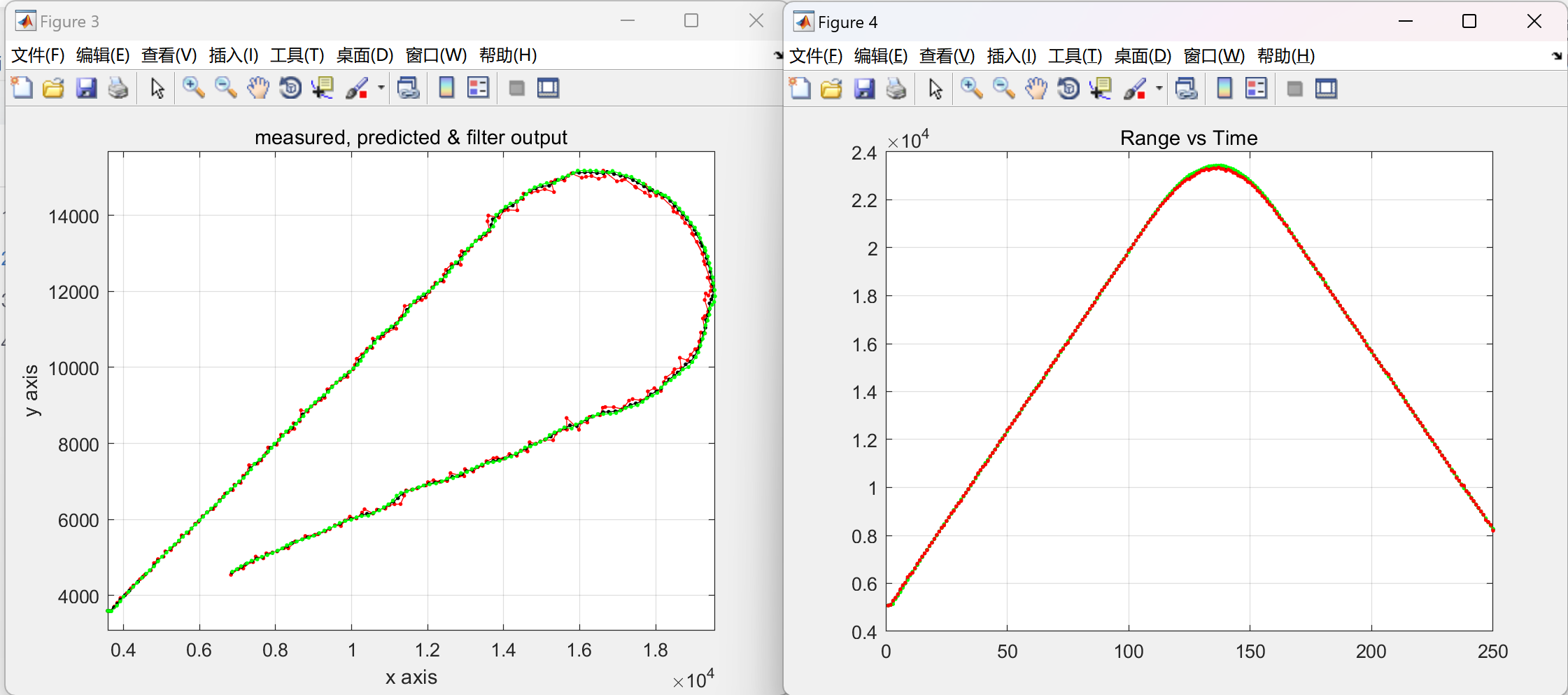
3. **比较轨迹**:将原始轨迹数据和滤波器输出的轨迹数据进行对比。可以通过可视化方法,如绘制轨迹图或计算误差指标来进行比较。
4. **评估性能**:根据比较结果评估卡尔曼滤波器的性能。常见的性能评估指标包括均方根误差(RMSE)、平均绝对误差(MAE)等。较低的误差表明滤波器能够更准确地跟踪目标轨迹。
5. **调整参数**:根据性能评估结果,调整卡尔曼滤波器的参数,如过程噪声和测量噪声的协方差矩阵,以进一步提高跟踪性能。
通过比较滤波器输出和原始轨迹,可以验证卡尔曼滤波器的有效性,并为其在实际应用中的优化提供指导。
📚2 运行结果

部分代码:
% Adding noise to first trajectory
t= [0:0.5:49.5];
r1= (int_dis+v.*t);
nr1=rnn*randn(size(t));
rn1=r1+nr1;
nt1=ann*randn(size(t));
thetan1=theta1+nt1;
xn1= rn1.* cos(thetan1);
yn1= rn1.* sin(thetan1);
figure(2);
plot(xn1,yn1, '.-r');
figure(3);
plot(xn1,yn1, '.-r');
hold on;
%2nd trajectory
rr2=(v^2/(f*g));
phi1= atan(rr2/(rmax-int_dis));
phi2=atan(rr2/(rmax-int_dis));
phi=(phi1+phi2);
t2= (pi+phi)*rr2/(300);
t=[50:0.5:50+t2];
thetar2= linspace(3*pi/4,-theta1-phi,2*t2+1);
xc= xmax+rr2*cos(theta1);
yc= ymax-rr2*sin(theta1);
x2=rr2.*cos(thetar2)+xc;
y2=rr2.*sin(thetar2)+yc;
figure(1);
plot(x2,y2,'.-b');
grid on;
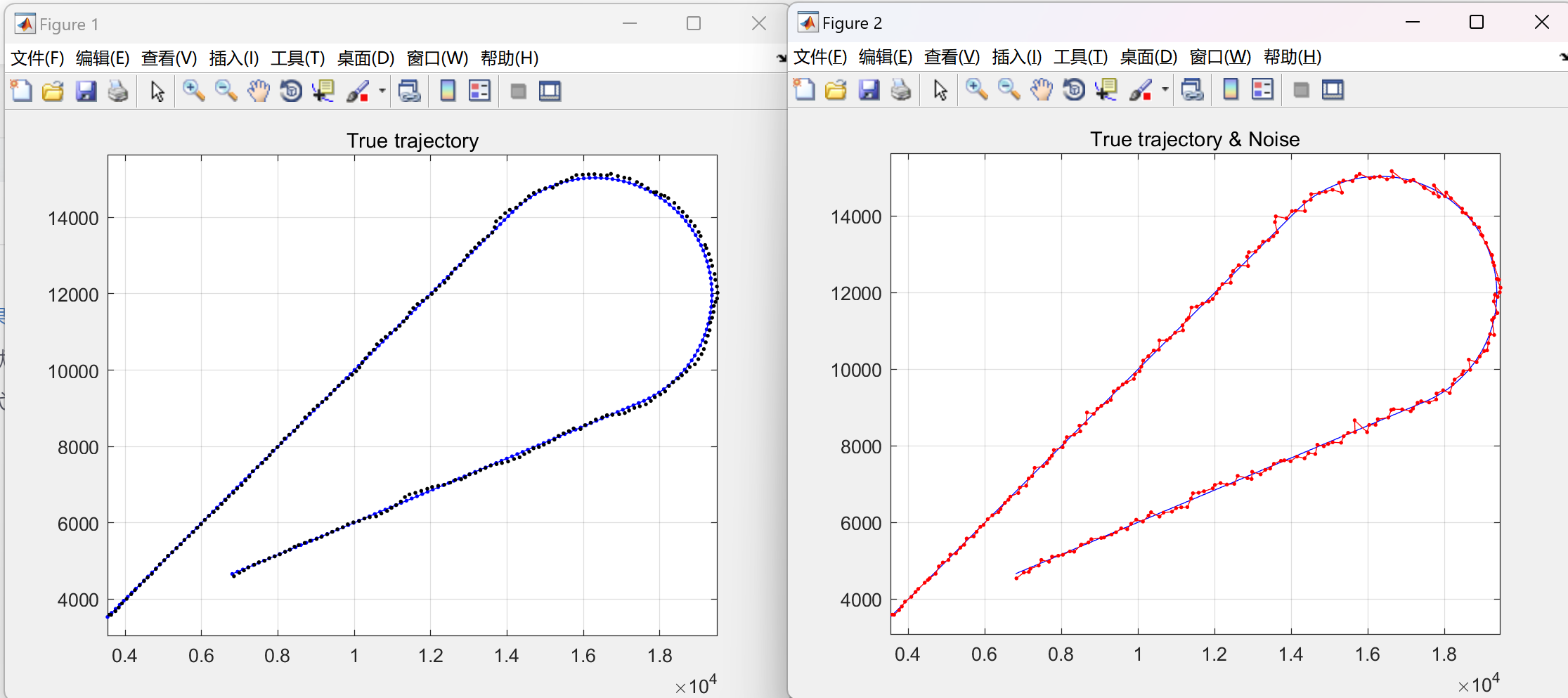
title('True trajectory');
figure(2);
plot(x2,y2,'b');
title('True trajectory & Noise');
r2=sqrt(x2.^2+y2.^2);
theta2= atan(y2./x2);
% Adding noise to second trajectory
nr2=rnn*randn(size(t));
rn2= r2+nr2;
nt2=ann*randn(size(t));
thetan2=theta2+nt2;
xn2= rn2.* cos(thetan2);
yn2= rn2.* sin(thetan2);
figure(2);
plot(xn2,yn2, '.-r');
figure(3);
plot(xn2,yn2, '.-r');
hold on;
%3rd trajectory
t= [50+t2:0.5:125];
a=(rmax-int_dis)*cos(pi/4-phi)+int_dis/sqrt(2);
b=(rmax-int_dis)*sin(pi/4-phi)+int_dis/sqrt(2);
thetar3= pi+pi/4-atan(2*rr2/(rmax-int_dis));
rr3= (v.*(t-(50+t2)));
x3=rr3.*cos(thetar3)+a;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]万琴,王耀南.基于卡尔曼滤波器的运动目标检测与跟踪[J].湖南大学学报:自然科学版, 2007, 34(3):5.DOI:10.3321/j.issn:1000-2472.2007.03.009.
[2]臧晓蕾.基于卡尔曼滤波器的船用雷达运动目标跟踪算法研究及性能分析[D].大连海事大学,2011.DOI:CNKI:CDMD:2.1011.110839.
[3]王建东,王亚飞,张晶.基于卡尔曼滤波器的运动目标跟踪算法[J].数字通信, 2009, 36(6):5.DOI:10.3969/j.issn.1005-3824.2009.06.014.
[4]赵斌.跟踪系统卡尔曼滤波器的仿真对比分析[J].长春工业大学学报:自然科学版, 2007(03):292-295.DOI:10.3969/j.issn.1674-1374-B.2007.03.013.















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









